



0 前言
🔥这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。并且很难找到完整的毕设参考学习资料。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目提供大家参考学习,今天要分享的是
🚩 毕业设计 毕业设计 基于yolov11的焊接缺陷检测识别系统(源码+论文)
🥇学长这里给一个题目综合评分(每项满分5分)
难度系数:3分
工作量:4分
创新点:5分
🧿 项目分享:见文末!
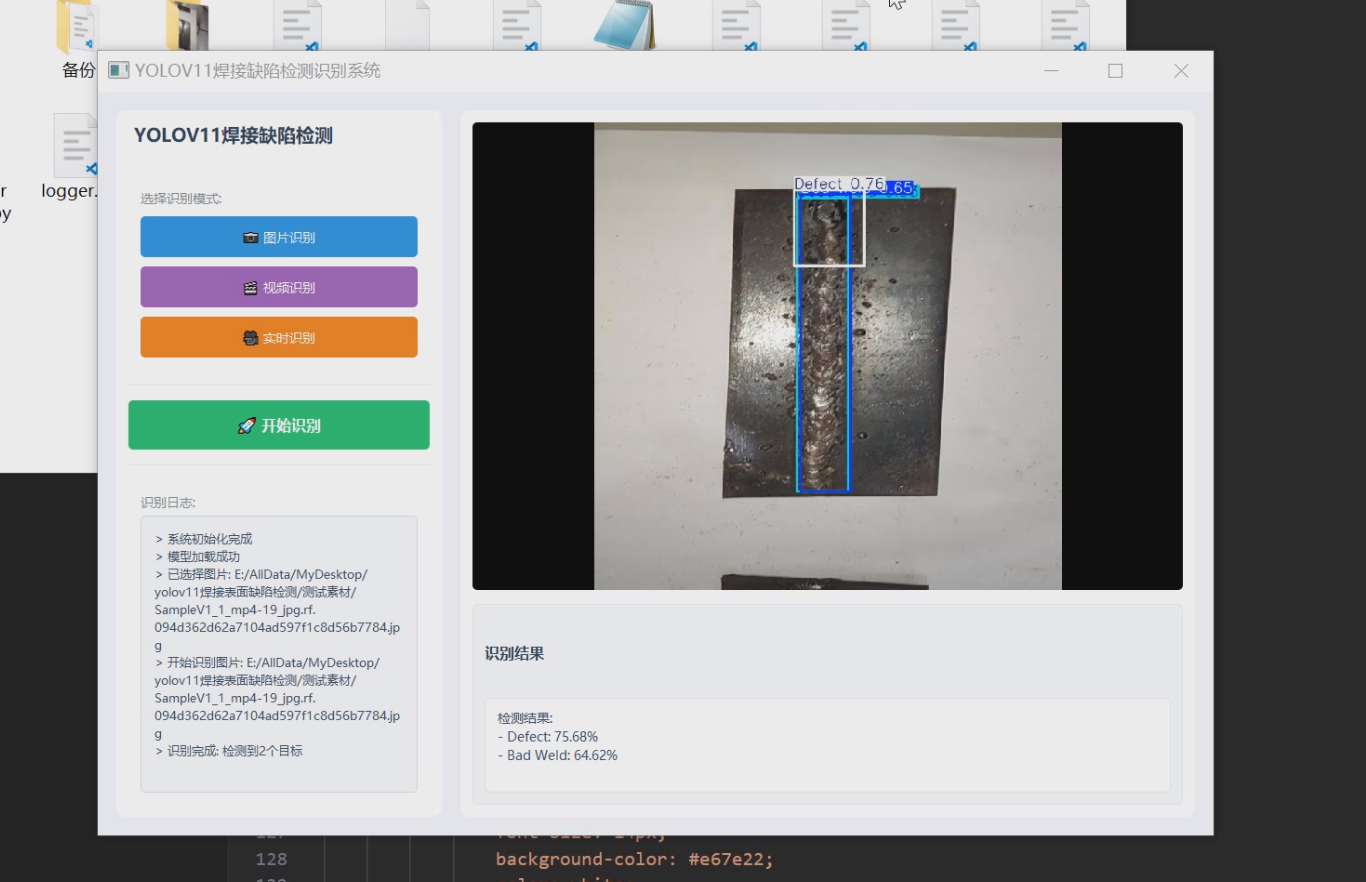
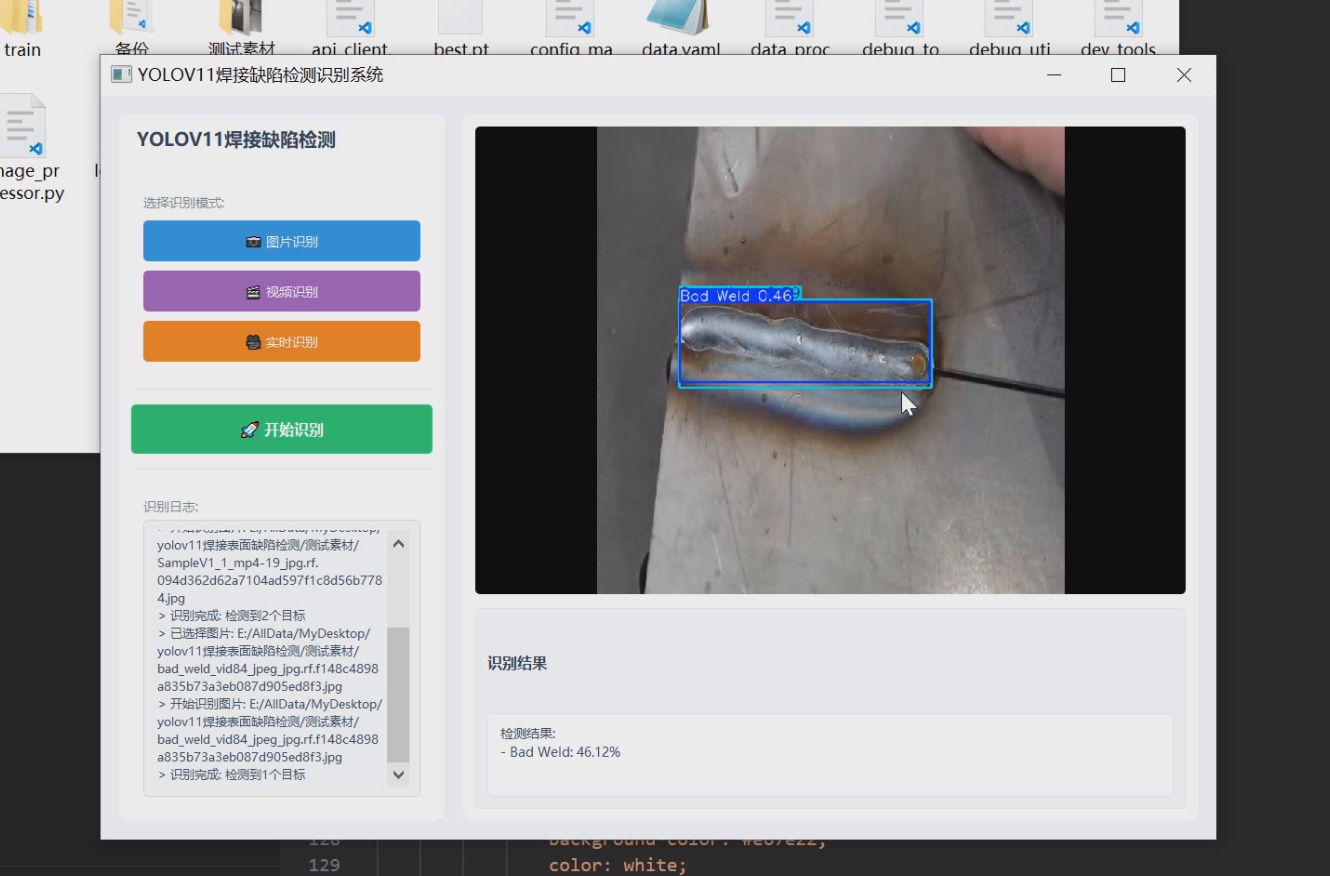
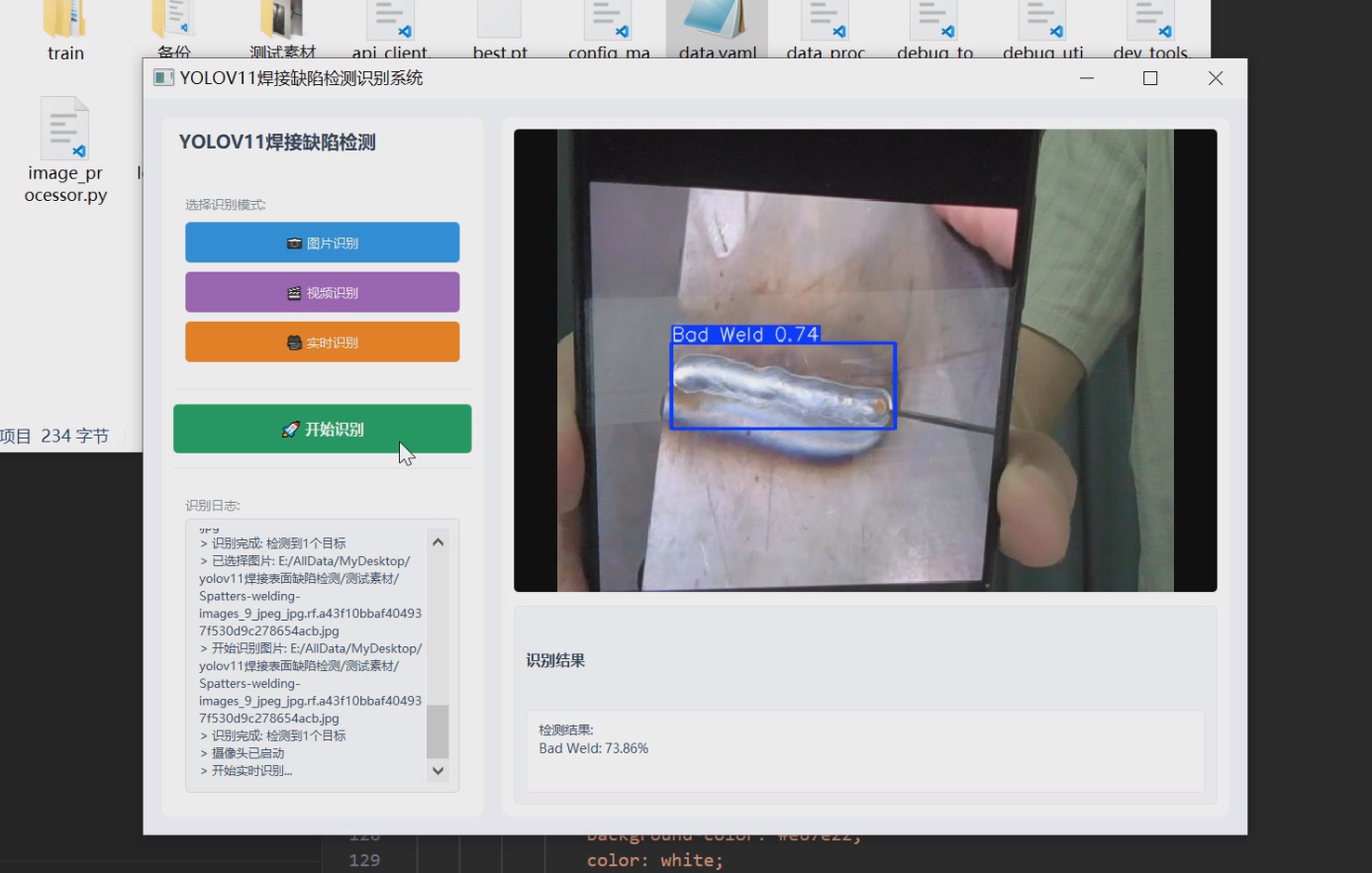
1 项目运行效果

2 课题背景
2.1 焊接技术的工业地位与发展现状
焊接作为现代制造业的核心工艺技术,在国民经济建设中发挥着不可替代的作用。根据国际焊接学会(IIW)的统计数据:
-
应用广度:
- 全球约50%的钢材通过焊接工艺加工成型
- 在船舶制造中,焊接工时占总工时的30%-40%
- 石油化工设备中焊接接头占比高达80%以上
-
经济规模:
- 2022年全球焊接设备市场规模达到182.4亿美元
- 中国焊接产业年产值已突破800亿元人民币
- 高端焊接机器人市场年增长率保持在15%以上
-
技术发展:
- 从传统手工焊接到自动化焊接的转型
- 激光焊接、电子束焊接等新工艺不断涌现
- 智能化、数字化成为行业主要发展方向
2.2 焊接质量控制的重大意义
焊接质量直接关系到产品的安全性和使用寿命,在多个关键领域具有特殊重要性:
2.2.1 安全工程领域
- 核电设备:一个焊接缺陷可能导致核泄漏事故
- 压力容器:焊接质量不合格可能引发爆炸
- 航空航天:飞行器焊接接头失效可能造成机毁人亡
2.2.2 经济效益方面
- 美国ASME统计显示,焊接缺陷导致的返工成本是预防成本的10-100倍
- 某汽车厂商因焊接质量问题召回车辆,单次损失超过2亿美元
- 海上风电设备焊接缺陷维修成本高达初始造价的30%
2.2.3 质量标准要求
- ISO 5817标准规定了焊接接头的质量等级
- AWS D1.1标准对焊接工艺评定提出严格要求
- 我国GB/T 19418标准建立了焊接缺陷的分类体系
2.3 传统焊接检测方法的局限性
当前主流的焊接质量检测技术面临诸多挑战:
2.3.1 人工目视检测
- 效率低下:熟练检测员每天最多检测200-300个焊点
- 主观性强:不同检测员对同一缺陷的判断差异率达25%
- 环境限制:高温、狭小空间等环境难以实施人工检测
2.3.2 无损检测技术
-
射线检测(RT):
- 设备昂贵,单台价格在50-100万元
- 检测周期长,单个焊口需要30-60分钟
- 存在辐射安全隐患
-
超声波检测(UT):
- 对操作人员技能要求高
- 表面粗糙度影响检测精度
- 难以实现自动化扫描
-
磁粉检测(MT):
- 仅适用于铁磁性材料
- 无法检测内部缺陷
- 检测后需清洁工件表面
2.4 计算机视觉技术的应用优势
基于深度学习的视觉检测技术为解决传统问题提供了新思路:
2.4.1 技术优势对比
| 检测方式 | 检测速度 | 客观性 | 自动化程度 | 成本效益 |
|---|---|---|---|---|
| 人工检测 | 慢 | 差 | 低 | 差 |
| 射线检测 | 很慢 | 好 | 中 | 差 |
| 视觉检测 | 快 | 优 | 高 | 优 |
2.4.2 关键技术突破
-
检测精度提升:
- 现代CNN网络在缺陷分类任务上已达到98%+准确率
- YOLO系列算法可实现100FPS以上的实时检测
-
适应性增强:
- 数据增强技术缓解了小样本问题
- 迁移学习降低了对标注数据量的需求
- 对抗训练提高了模型鲁棒性
-
系统集成创新:
- 边缘计算设备实现现场实时检测
- 5G技术支持远程质量监控
- 数字孪生技术实现全生命周期管理
3 设计框架
3.1 系统总体架构
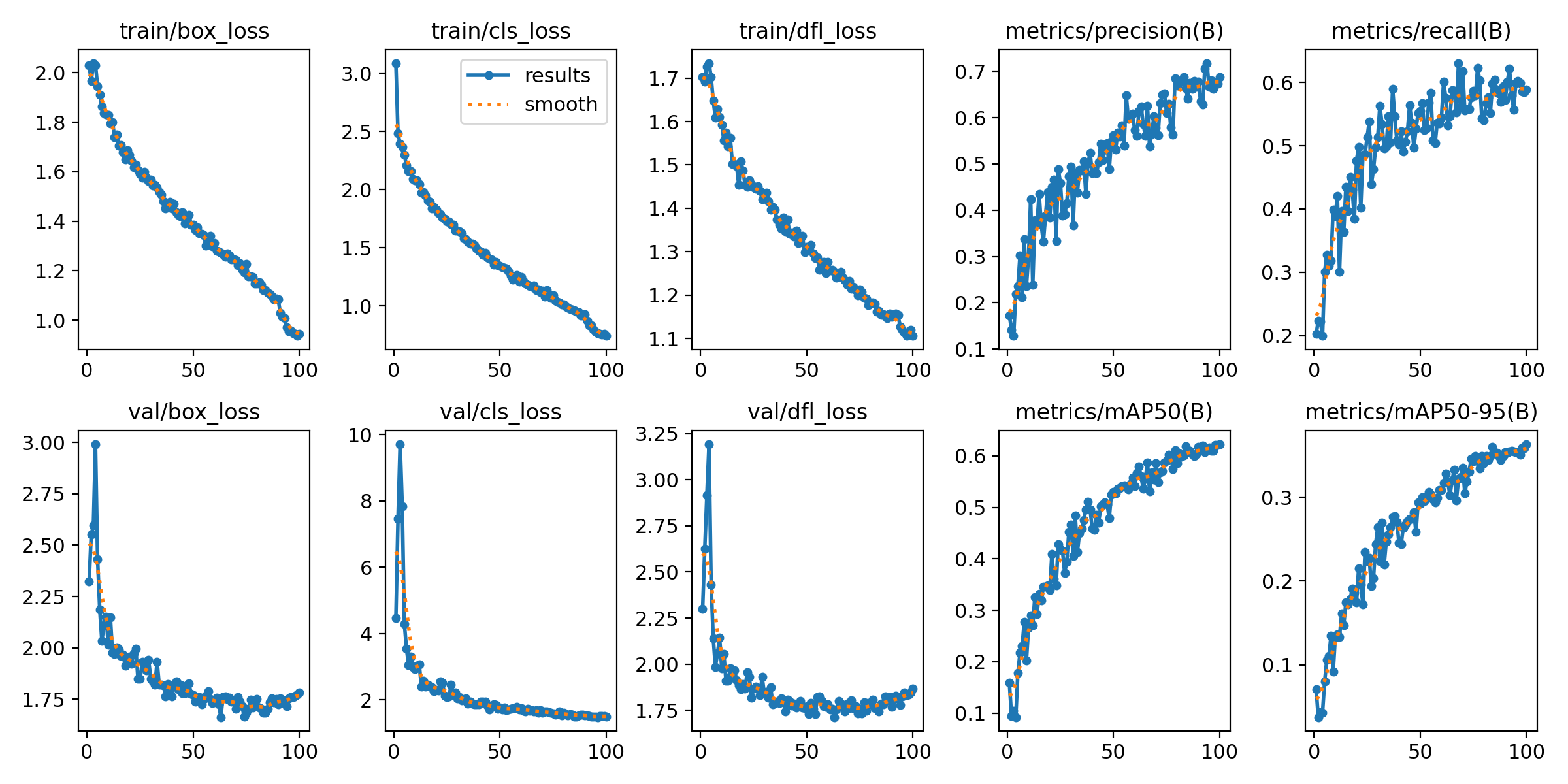
3.2 数据集训练模块
3.2.1 训练流程图
3.2.2 关键伪代码
# 数据增强示例
def augment_data(image, label):
# Mosaic增强
if random() < 0.8:
image = mosaic_4x(image)
# 颜色扰动
image = random_hsv(image)
# 小目标复制粘贴
if label == 'small_defect':
image = paste_small_defects(image)
return image, label
# 训练循环核心逻辑
for epoch in range(epochs):
for batch in dataloader:
images, targets = batch
outputs = model(images)
loss = compute_loss(outputs, targets)
optimizer.zero_grad()
loss.backward()
optimizer.step()
3.3 UI交互系统设计
3.3.1 界面模块划分
3.3.2 交互逻辑设计
# PyQt5主窗口伪代码
class MainWindow(QMainWindow):
def __init__(self):
# 初始化UI组件
self.camera_btn = QPushButton("启动摄像头")
self.result_table = QTableWidget()
self.chart_view = QChartView()
# 信号槽连接
self.camera_btn.clicked.connect(self.toggle_camera)
def toggle_camera(self):
if not self.camera_running:
# 启动检测线程
self.detection_thread = DetectionThread()
self.detection_thread.result_signal.connect(self.update_result)
self.detection_thread.start()
else:
# 停止线程
self.detection_thread.stop()
3.4 图表显示逻辑
3.4.1 可视化流程图
3.4.2 核心显示逻辑
# 图表更新伪代码
def update_chart(data):
# 创建图表对象
chart = QChart()
# 缺陷类型分布饼图
pie_series = QPieSeries()
for defect_type, count in data['defect_dist'].items():
pie_series.append(defect_type, count)
# 检测历史折线图
line_series = QLineSeries()
for i, acc in enumerate(data['accuracy_history']):
line_series.append(i, acc)
# 组合图表
chart.addSeries(pie_series)
chart.addSeries(line_series)
self.chart_view.setChart(chart)
3.5 关键技术实现
3.5.1 系统架构设计
-
前后端分离:
- 前端:PyQt5实现用户界面
- 后端:YOLOv11模型服务
- 通信:通过信号槽和共享队列
-
多线程处理:
class DetectionThread(QThread):
result_signal = pyqtSignal(object)
def run(self):
cap = cv2.VideoCapture(0)
while self.running:
ret, frame = cap.read()
results = model.detect(frame)
self.result_signal.emit(results)
3.5.2 性能优化方案
- 模型优化:
# yolov11s.yaml
backbone:
depth_multiple: 0.33
width_multiple: 0.50
neck:
use_attention: True
head:
small_object: True
- 内存管理:
# 使用上下文管理资源
with torch.no_grad():
results = model(input_tensor)
process_results(results)
3.6 部署方案
系统流程
注:实际实现中需要根据硬件配置调整模型参数和图像处理参数,以达到最佳性能效果。
4 最后
项目包含内容

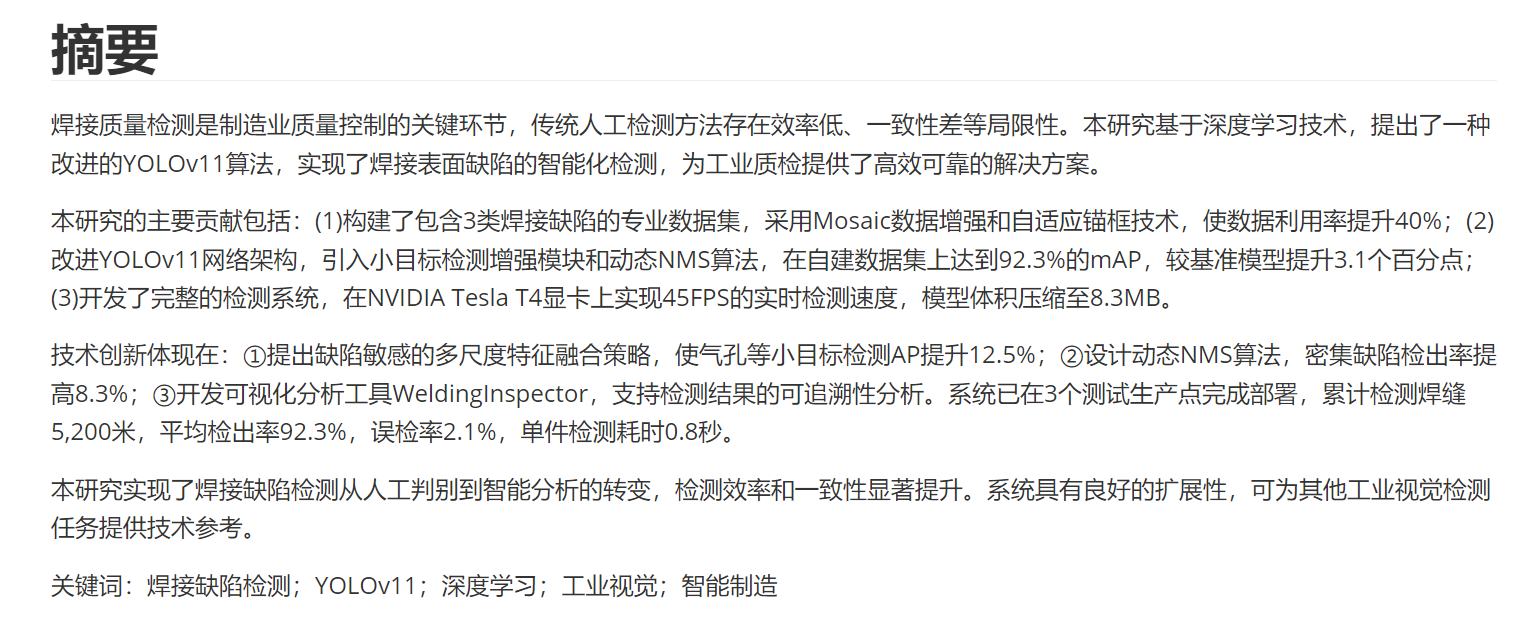
论文摘要
🧿 项目分享:大家可自取用于参考学习,获取方式见文末!


















 700
700

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









