







题目: http://www.cnblogs.com/ljc20020730/p/6919989.html
1.烧水问题SDOI2008(山东省队选拔)
对于本题,O(n2)的贪心算法很好找出,就是让前几杯水都加热到100℃后面进行热传递。
打印出前几项,会发现规律……可以优化到O(n)。 或者,也可以无耻地打表……
提醒:令第一杯水需要提高t度,找出第二杯、第三杯……需要提高温度的比例关系,找规律解决。

推倒如下:
设沸腾温度为a
则第一杯温度为a,需要加热t1=a
第二杯可以中和的最高温度为a/2,需要加热t2=a/2
第三杯可以中和的最高温度为t3=(a/4+a)/2=5a/8,需要加热t3=3a/8
第四杯可以中和的最高温度为t4=((a/8+5a/8)/2+a)/2=11a/16,需要加热t4=5/16
则t3/t2=3/4=1-1/4,
t4/t3=5/6=1-1/6
…………………………
继续推导得t(n+1)/t(n)=1-1/2n
根据题目描述及物理常识,我们至多能往当前的杯子里分配(现在花费的总热量/i)的热量,而且一定有办法做到。
所以,实际上第i杯水要花费(上一次花费的热量*(2*i-i)/(2*i))单位热量。
var n,i:longint; cur,tot:double; begin assign(input,'heat.in'); assign(output,'heat.out'); reset(input); rewrite(output); readln(n); cur:=420000.00/n; tot:=0; for i:=1 to n-1 do begin tot:=tot+cur; cur:=cur*(2*double(i)-1)/(2*double(i)) end; writeln(tot+cur:0:2); close(input); close(output); end.
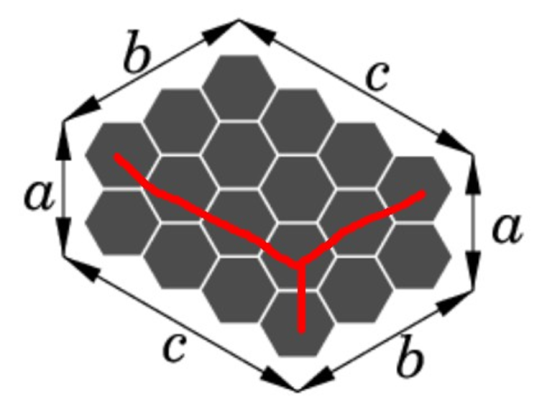
2.六边形(hexagons.pas/c/cpp)
首先讲一种暴力的方法orz
●暴力: 一圈一圈的加,加到i<a or j<b or k<c。
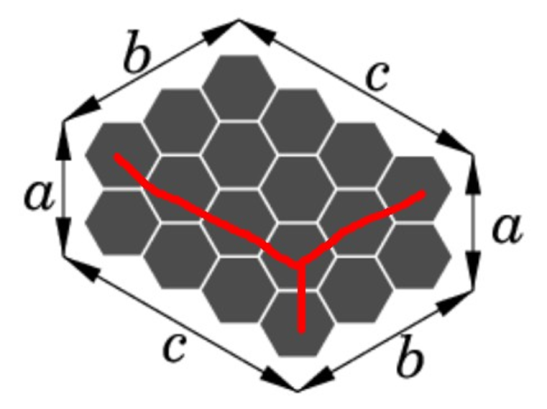
ans:=7; //红色线为公共点。 i:=2;j:=2;k:=2; while i<a do begin ans:=ans+j+k-1; i:=i+1; end; while j<b do begin ans:=ans+i+k-1; j:=j+1; end; while k<c do begin ans:=ans+i+j-1; k:=k+1; end; writeln(ans);
接下来讲一种O(1)的算法:
直接ans=a*c+a*b+b*c-c-b-a+1
看到下面看到分成3块的面积和为ac+bc+ab
重叠算一次的a+b+c
重叠算两次的1(交点)
所以ans=ac+bc+ab-(a+b+c)+1=a*c+a*b+b*c-c-b-a+1
程序如下:
var a,b,c:longint; begin assign(input,'Hexagons.in'); assign(output,'Hexagons.out'); reset(input); rewrite(output); readln(a,b,c); writeln(a*c+a*b+b*c-c-b-a+1); close(input); close(output); end.
3.最大子序和
对于样例的解释图:
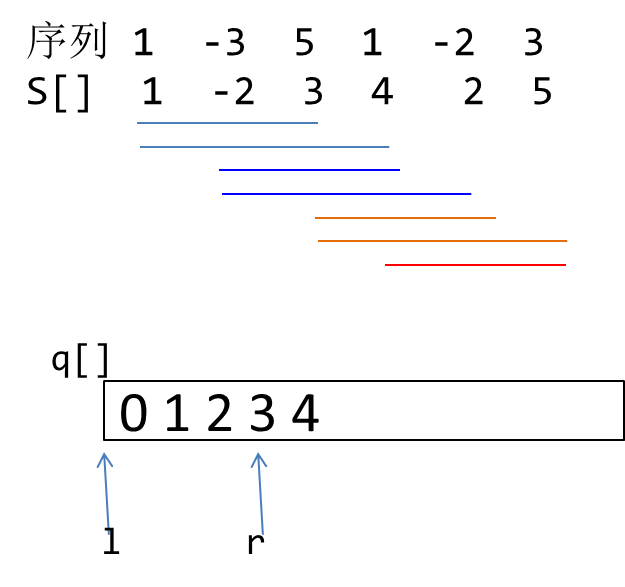
输入数据,不需要保存序列,可马上序列前缀和为s[i]。q[i]队列维护选取范围的编号,l,r分别表示队列的首尾指针。
队列放起始点
初始化l=0 r=-1
首出队:i-q[l]>B
尾出队:s[q[r]]>=s[i-a]
入队:inc(r);q[r]:=i-a;
ans:=max(s[i]-s[q[l]],ans);
程序如下:
var l,r,a,b,n,i,t,max:longint; s,q:array[0..500000]of longint; begin assign(input,'max.in'); assign(output,'max.out'); reset(input); rewrite(output); readln(n,a,b); s[0]:=0; for i:=1 to n do begin read(t); s[i]:=s[i-1]+t; end;//前缀和 l:=0; r:=-1; max:=-maxlongint; for i:=a to n do begin if (l<=r)and(i-q[l]>b) then inc(l);//当l在r前面并且当前的长度超过B,出队 while (l<=r)and(s[i-a]-s[q[r]]<=0) do dec(r);//当l在r的前面并且新加入队列的数为负数,那么得出的答案一定会小于某个数 inc(r); q[r]:=i-a;//扩充队列 if s[i]-s[q[l]]>max then max:=s[i]-s[q[l]];//s[i]-s[q[l]]表示 i 到 当前队列起始点这么多数的和 end; writeln(max);//输出 close(input); close(output); end.
这样就可以使平均时间复杂度降为O(n2)以下,关键就是上面的当l在r的前面并且新加入队列的数为负数,那么得出的答案一定会小于某个数,判掉
4.哥德巴赫矩阵
运用筛法求质数的方法,建立一个布尔数组a[]。
 =s[x2]-s[x1-1])*(s[y2]-s[y1-1])
=s[x2]-s[x1-1])*(s[y2]-s[y1-1])

观察上面的规律(除2以个的质数的增加)编程实现。
复杂度:预处理O(MAXN*√MAXN),处理s[]为O(N),查询O(1)。
程序如下:
const maxn=1000000; var u:array[1..10000000]of boolean; s:array[0..10000000]of int64; i,m,x1,y1,x2,y2:longint; now:int64; Procedure prime(n:longint); var i,j:longint; begin for i:=2 to n do if not u[i] then begin j:=i+i; while j<=n do begin u[j]:=true; inc(j,i); end; end; end; begin assign(input,'pmatrix.in'); assign(output,'pmatrix.out'); reset(input); rewrite(output); prime(maxn); s[1]:=0; s[2]:=0; now:=0; for i:=3 to maxn do begin if u[i]=false then inc(now); s[i]:=now; end; readln(m); for i:=1 to m do begin readln(x1,y1,x2,y2); writeln((s[x2]-s[x1-1])*(s[y2]-s[y1-1])) ; end; close(input); close(output); end.

















 1417
1417

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









