







以下是一个简单的 倒立摆串行PID 算法的 MATLAB 仿真示例。在这个示例中,我们实现了两个 PID 控制器:一个控制摆杆的角度,另一个控制小车的位置。
1. 系统建模
我们将倒立摆的物理模型简化为一个具有以下方程的动力学系统:
小车的质量为 m1
摆杆的质量为 m2
摆杆的长度为 L
小车的位置为 x
摆杆的角度为 θ
倒立摆的动态方程基于拉格朗日方程(简化模型):
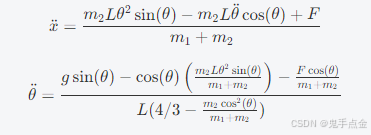
在该模型中,控制力 F 来自 PID 控制器。
2. PID 控制器设计
我们定义两个PID控制器:
PID 控制器1:控制摆杆的角度。
PID 控制器2:控制小车的位置。
3. MATLAB 仿真代码
% MATLAB script for serial PID control of an inverted pendulum
clear;
clc;
% Simulation parameters
dt = 0.01; % Time step
T = 10; % Total simulation time
steps = T / dt; % Number of steps
time = 0:dt:T-dt; % Time vector
% System parameters
m1 = 1.0; % Mass of the cart (kg)
m2 = 0.2; % Mass of the pendulum (kg)
L = 1.0; % Length of the pendulum (m)
g = 9.81; % Gravitational acceleration (m/s^2)
% Initial conditions
x = 0; % Initial cart position (m)
theta = pi/4; % Initial pendulum angle (rad)
x_dot = 0; % Initial cart velocity (m/s)
theta_dot = 0; % Initial pendulum angular velocity (rad/s)
% PID controller parameters (cart position control)
Kp_x = 10;
Ki_x = 1;
Kd_x = 1;
% PID controller parameters (pendulum angle control)
Kp_theta = 100;
Ki_theta = 10;
Kd_theta = 5;
% Initialize variables for PID
integral_x = 0;
integral_theta = 0;
error_x_prev = 0;
error_theta_prev = 0;
% Store results for plotting
x_vals = zeros(1, steps);
theta_vals = zeros(1, steps);
x_dot_vals = zeros(1, steps);
theta_dot_vals = zeros(1, steps);
% Simulation loop
for i = 1:steps
% Compute PID for pendulum angle control (θ)
error_theta = theta; % Set desired θ = 0 (upright position)
integral_theta = integral_theta + error_theta * dt;
derivative_theta = (error_theta - error_theta_prev) / dt;
pid_theta_output = Kp_theta * error_theta + Ki_theta * integral_theta + Kd_theta * derivative_theta;
error_theta_prev = error_theta;
% Compute PID for cart position control (x)
error_x = 0 - x; % Set desired x = 0 (center position)
integral_x = integral_x + error_x * dt;
derivative_x = (error_x - error_x_prev) / dt;
pid_x_output = Kp_x * error_x + Ki_x * integral_x + Kd_x * derivative_x;
error_x_prev = error_x;
% Compute forces acting on the system (F = pid_theta_output + pid_x_output)
F = pid_theta_output + pid_x_output;
% Equations of motion (simplified)
% x_double_dot and theta_double_dot are derived from the system dynamics
% For simplicity, use simplified models in terms of force and angles.
denom = m1 + m2 * (1 - cos(theta)^2);
x_double_dot = (F + m2 * L * theta_dot^2 * sin(theta) - m2 * g * sin(theta) * cos(theta)) / denom;
theta_double_dot = (g * sin(theta) - cos(theta) * (F + m2 * L * theta_dot^2 * sin(theta))) / (L * (4/3 - (m2 * cos(theta)^2) / (m1 + m2)));
% Update velocities and positions
x_dot = x_dot + x_double_dot * dt;
theta_dot = theta_dot + theta_double_dot * dt;
x = x + x_dot * dt;
theta = theta + theta_dot * dt;
% Store the results for plotting
x_vals(i) = x;
theta_vals(i) = theta;
x_dot_vals(i) = x_dot;
theta_dot_vals(i) = theta_dot;
end
% Plot results
figure;
subplot(2,1,1);
plot(time, x_vals, 'r', 'LineWidth', 2);
title('Cart Position');
xlabel('Time (s)');
ylabel('Position (m)');
subplot(2,1,2);
plot(time, theta_vals, 'b', 'LineWidth', 2);
title('Pendulum Angle');
xlabel('Time (s)');
ylabel('Angle (rad)');
4. 说明
系统参数:
m1:小车的质量。
m2:摆杆的质量。
L:摆杆的长度。
g:重力加速度。
PID参数:
Kp_x, Ki_x, Kd_x:控制小车位置的PID参数。
Kp_theta, Ki_theta, Kd_theta:控制摆杆角度的PID参数。
状态更新:
小车的加速度和摆杆的角加速度通过方程来计算。这里使用简化的运动方程。
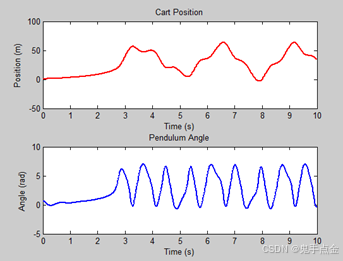
5. 仿真结果
运行仿真后,您将看到两个图形:
小车的位置:显示小车如何调整位置以帮助摆杆保持平衡。
摆杆的角度:显示摆杆如何调整角度并保持竖直。
6. 参数调节
为了更好地控制系统,您可能需要根据实际情况调整 PID 控制器的参数(Kp, Ki, Kd)。可以通过增大或减小这些参数来优化系统的响应速度、稳定性等。
7. 结论
该 MATLAB 仿真演示了如何使用串行 PID 控制器来控制倒立摆系统。通过调节 PID 参数,您可以实现更好的控制效果并使倒立摆系统稳定在竖直位置。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









