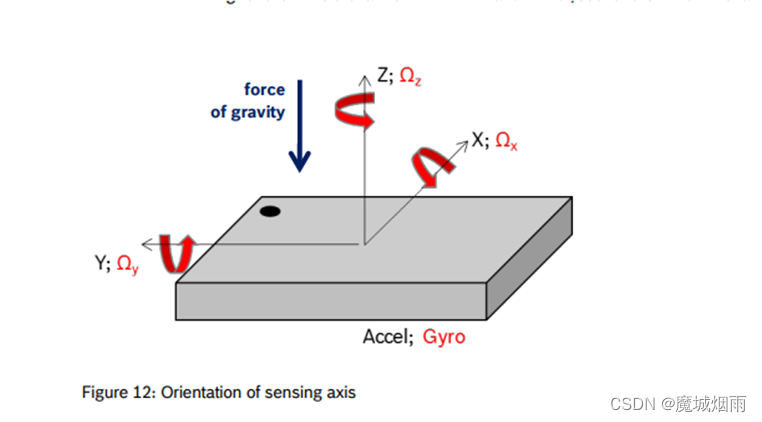
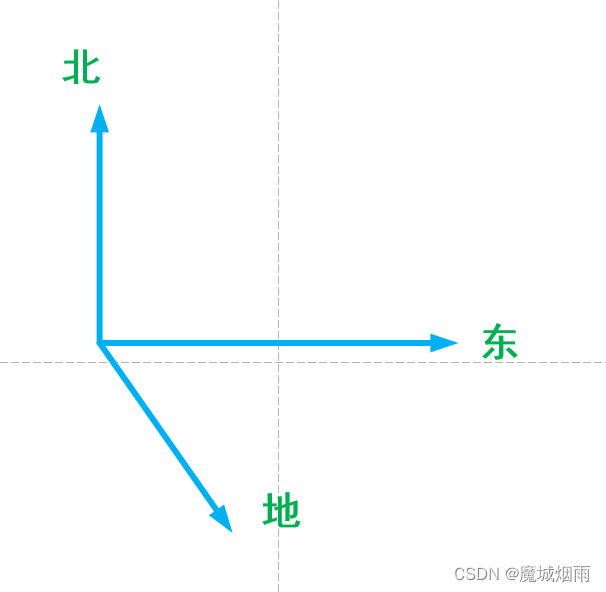
目录 文章目录 目录 摘要 1.简介---BMI088 方向 2.控制 摘要 本节主要记录IMU陀螺仪方向的重要性,欢迎批评指正!!! 1.简介—BMI088 方向 注意这个BMI088 的IMU方向,特别是是那个左上角的黑色点点,他的坐标系满足右手坐标系,但是我们无人机坐标系是北东地坐标系,因此需要把IMU方向进行旋转到和我们无人机同样坐标系下。 如果我们把无人机机体对应的方向是正北,那么BMI088的X轴方向正好是正北,Y轴方向正好是正东,垂直方向取反即可。这样我们的X轴的变化就是对应横滚角度,Y轴对应俯仰角,Z对应偏航角。这对我们进行控制时非常重要。当我们对着机体往前看,此时把飞机水平往右侧横滚,可以看到横滚角度是正值;同理俯仰也是往








 超级会员免费看
超级会员免费看
 本文介绍了BMI088 IMU陀螺仪的方向重要性,强调了其坐标系与无人机坐标系的匹配,以及如何通过坐标旋转确保一致。正确设置能确保无人机的横滚、俯仰和偏航角准确控制。
本文介绍了BMI088 IMU陀螺仪的方向重要性,强调了其坐标系与无人机坐标系的匹配,以及如何通过坐标旋转确保一致。正确设置能确保无人机的横滚、俯仰和偏航角准确控制。

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 542
3960
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
542
3960
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








