



巧手打字通平台简介
巧手打字通是一个专为打字初学者,特别是中小学生量身设计的在线打字练习平台。该平台通过科学、有趣且高效的教学方式,帮助用户快速掌握打字技巧,提升打字速度和准确率。
打字学习路径
平台提供了整套的从入门到精通的各类课程,包括:认识键盘,科普,入门课程,学拼音,学英语,读诗词,弹钢琴,玩游戏等几大板块。
在学习时,建议按照上述顺序依次学习,如果你有一定的基础知识储备,也可以有选择的进行部分功能学习。但需要注意的是,为了保证学习质量,各板块内还考虑的设置了防止超前学功能。
认识键盘板块
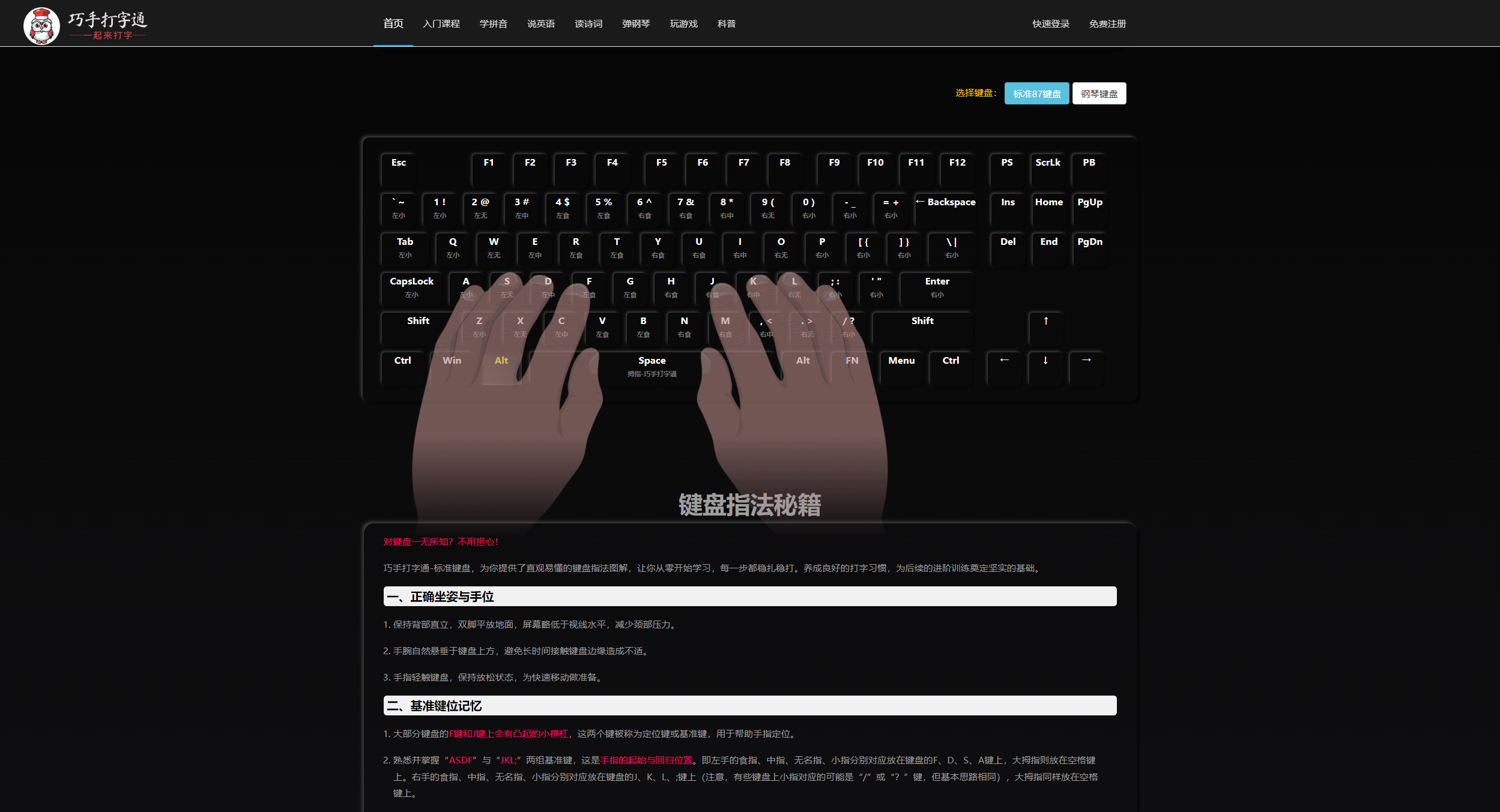
为打字练习初学者,提供了可视化的手指键位映射关系,可以清楚的看到每个字母的敲击手势。除此之外,还介绍了电脑坐姿,基准键记忆,手指分工以及击键技巧等基础知识。
科普板块
在正式进入课程前,建议学习一下平台科普板块里的相关知识。教你如何正确的开始学习打字以及如何提升打字速度。
入门课程板块

针对初学者采用了引导式学习的设计,将键盘键位进行分组,按组进行小步递进式学习,每组课程又包含学习、复习、实践和游戏验证四个阶段,确保用户能够逐步掌握每个按键的使用。入门课程是基础,需要很好的巩固,如果感觉没有掌握,建议多重复学习几次。后面的课程板块主要是为了练习而设计。
学拼音

掌握了基本的键盘输入方法后,接下来就需要大量的练习,已完成盲打的目标。
学拼音板块,将键盘字母与拼音相结合,提供声母、韵母、整体认读音节的发音练习和汉字拼读示例,特别适合小朋友提前了解或巩固拼音知识。
学英语
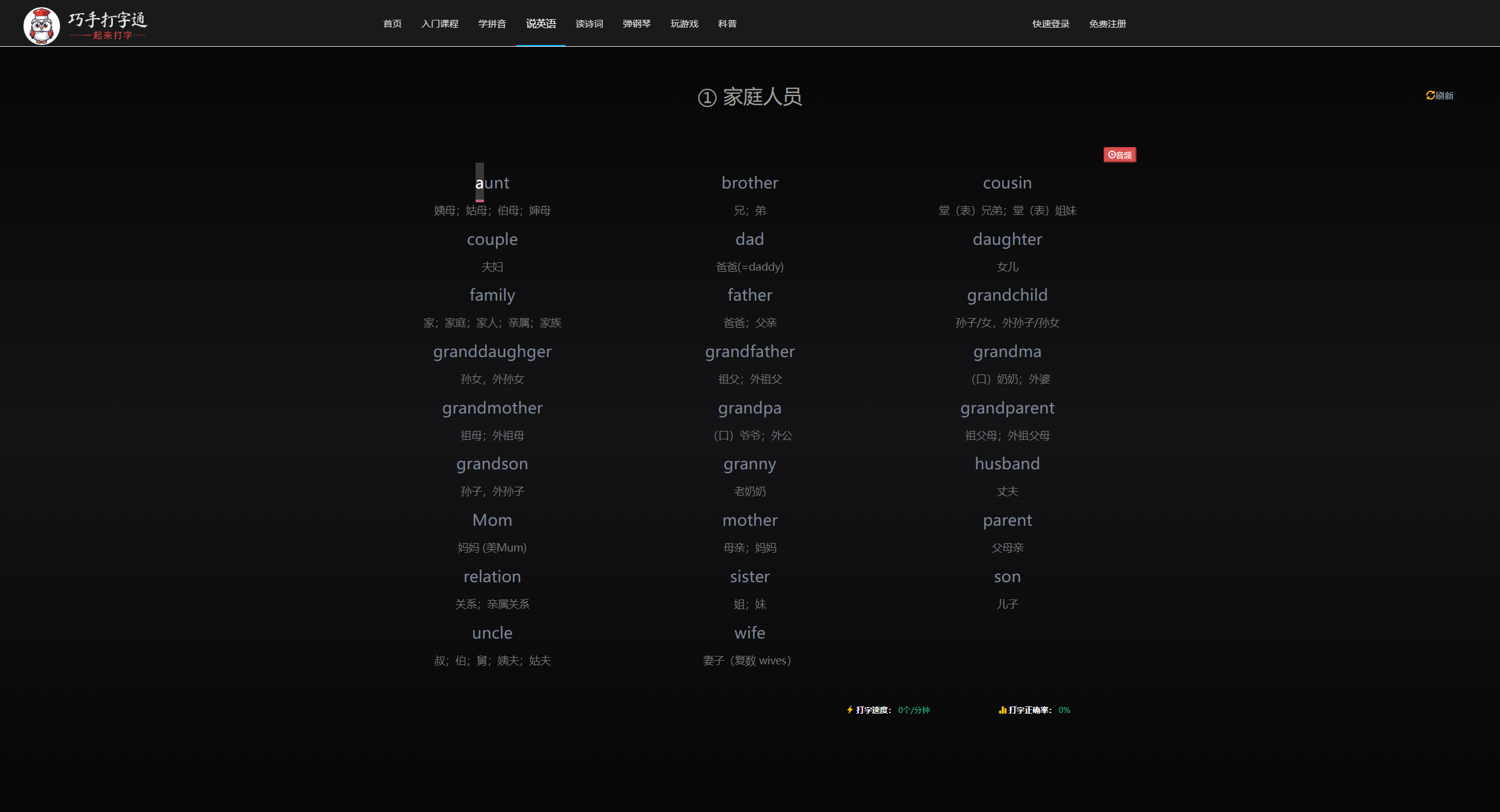
提供了小升初一千多个单词词汇拼读练习,支持拼写、词义和发音三个维度的学习,巩固打字本领的同时提升英语水平。
读诗词
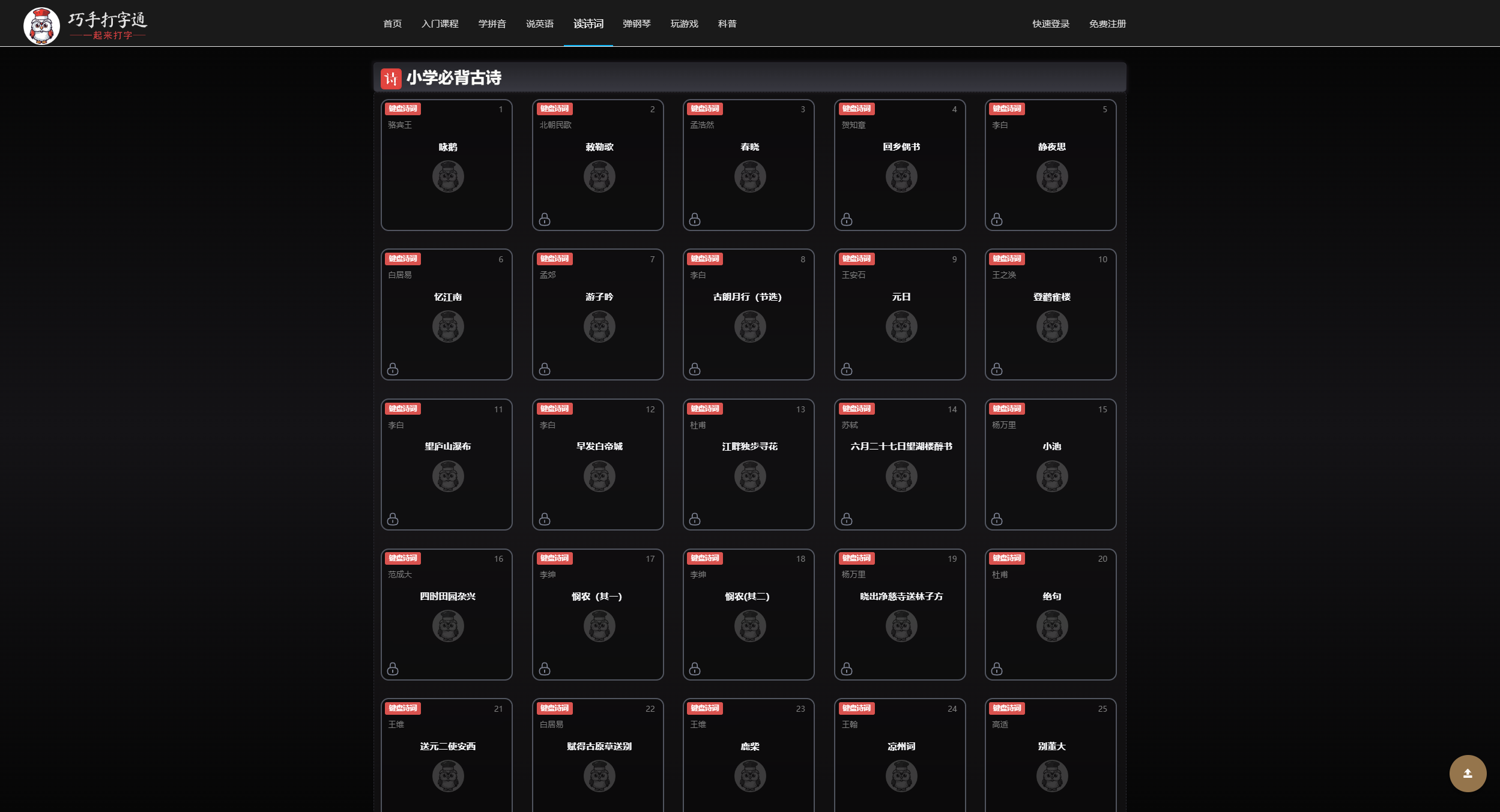
选取小学阶段要求背诵的诗词制作成课程,实现拼音、汉字、读音三位一体的内容展示,同时提供打字速度与正确率的统计分析,努力和进步看得见。
弹钢琴
创新性地将钢琴与键盘相结合,提供键盘钢琴功能,学习之余练习歌曲,寓教于乐。
玩游戏

提供多款打字练习小游戏,如《星球大战》、《水果切切》、《打地鼠》、《打飞字》、《节奏大师》、《敲单词》等,让学习变得充满期待和乐趣
总结
以上课程讲解只是平台的部分功能,平台课程还在不断地更新当中。
见微知著,巧手打字通是一个集教学性、趣味性和实用性于一体的在线打字练习平台,旨在为广大用户提供高效、便捷的打字学习体验。
巧手打字通官网地址:https://laidazi.com

















 3174
3174

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









