



1.链表的分类
有三种属性可以组成8(2*2*2)种
带头 不带头
单向 双向
循环 不循环
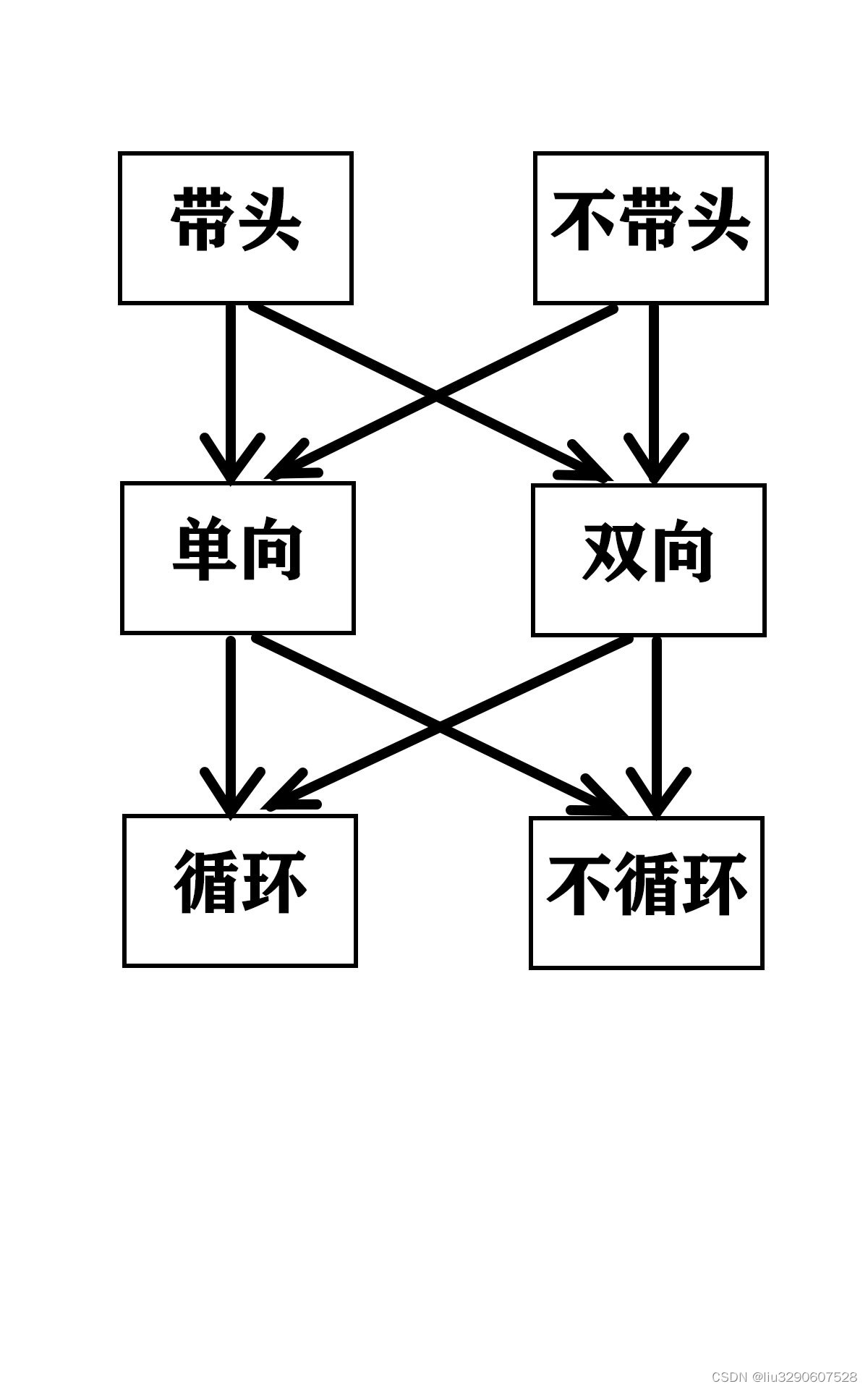
其中最常用的为两种形式:单链表 和 双向链表
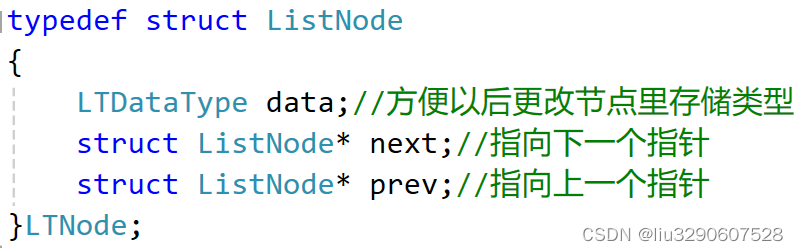
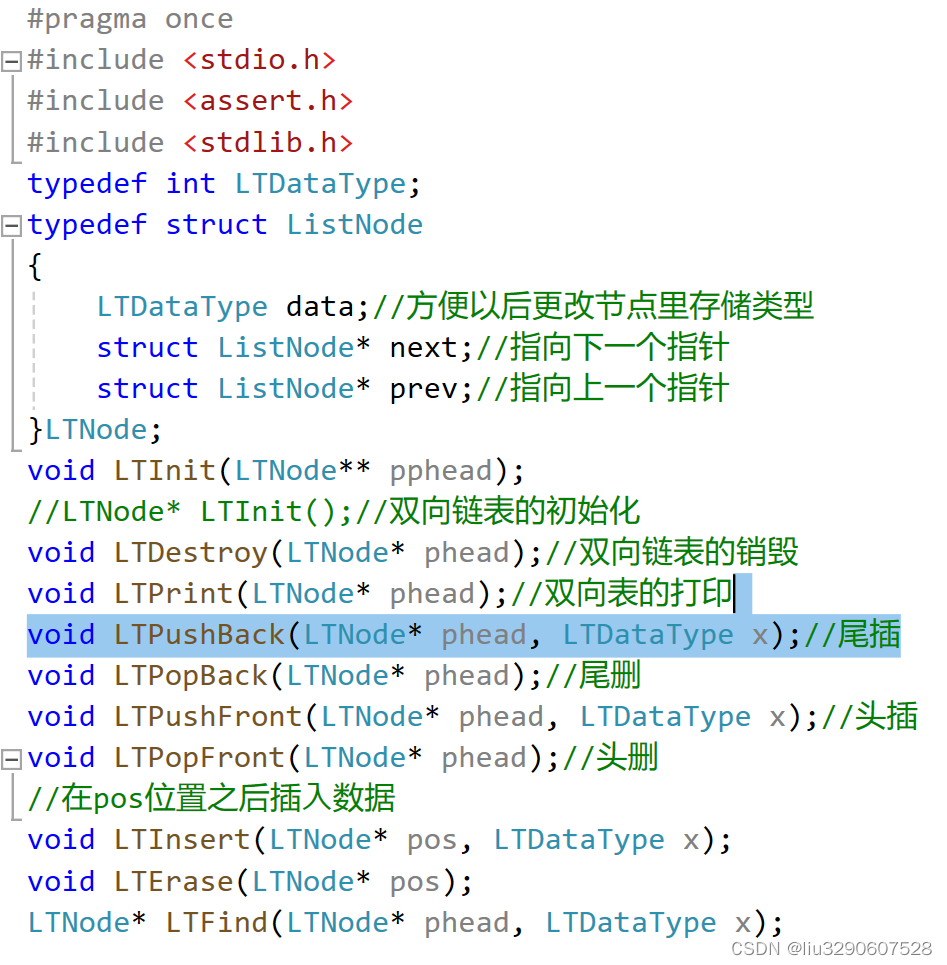
2.双向链表的基本结构
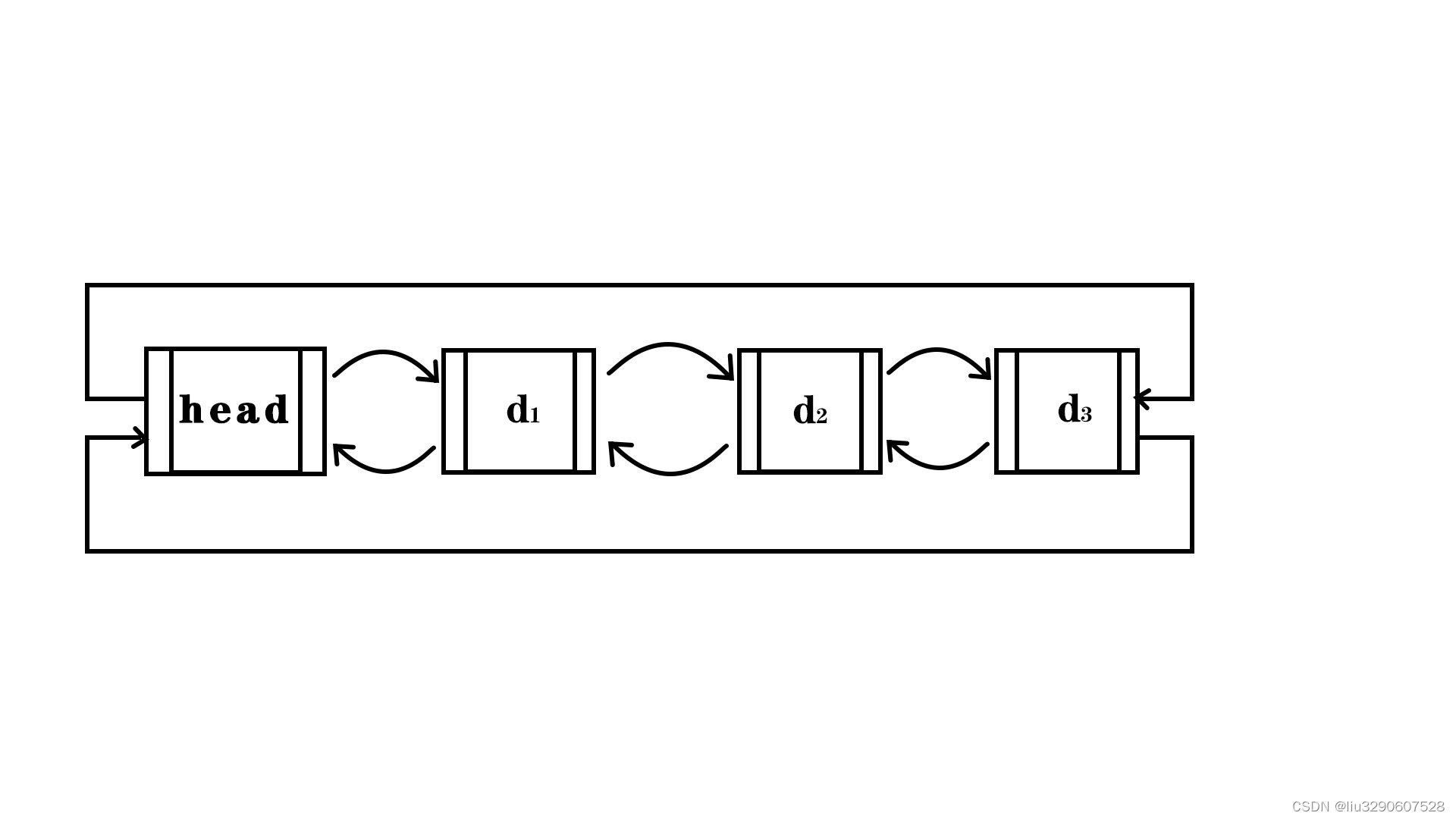
双向链表的全称为(带头双向循环链表),所以要定义出双向链表就得从这三步来入手
1.带头:说明它拥有头结点(也就是有哨兵位)
2.双向:说明他不仅拥有后继指针(这里暂且命名为next)也拥有前置指针(命名为prev)
3.循环:说明链表首位相连,即尾节点指向哨兵位
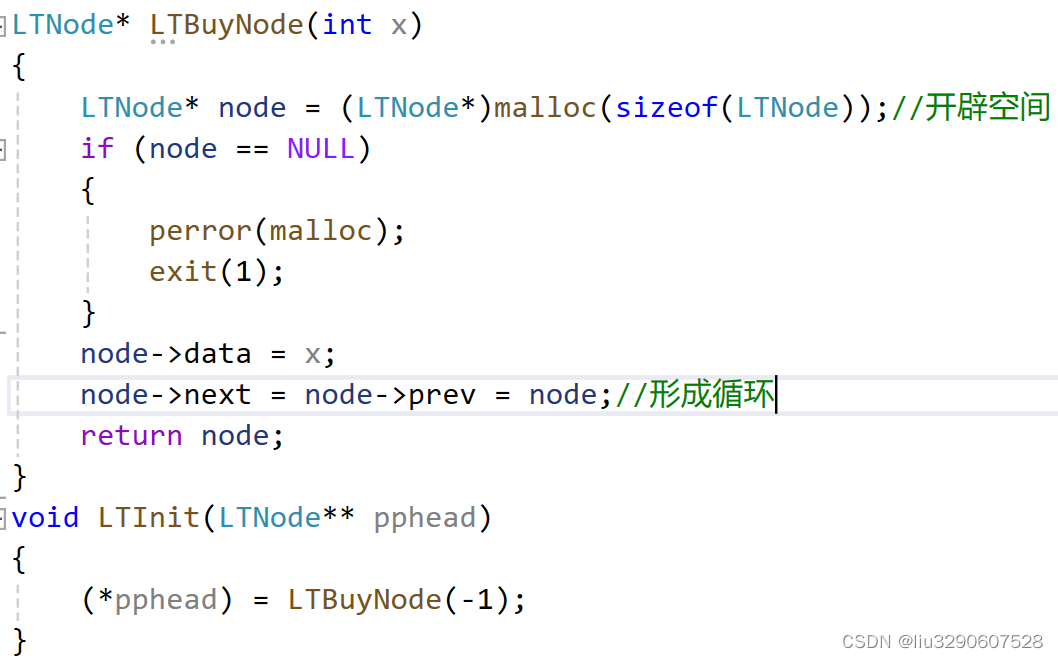
4.实现:
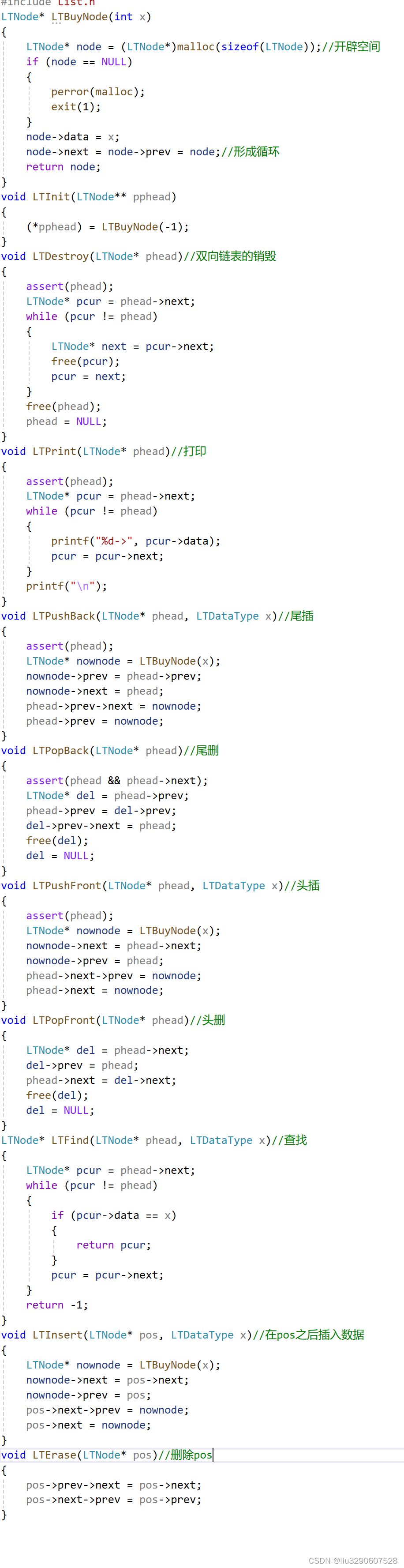
3.初始化双向链表
双向链表初始化与单链表初始化并不一样
双向链表需要在初始化前定义头结点
4.尾插
1.为尾插数据开辟出一块节点
2.根据位置关系改变其后置指针以及前置指针
3.注意改完后phead->prev会不会改变,最好将其放到最后
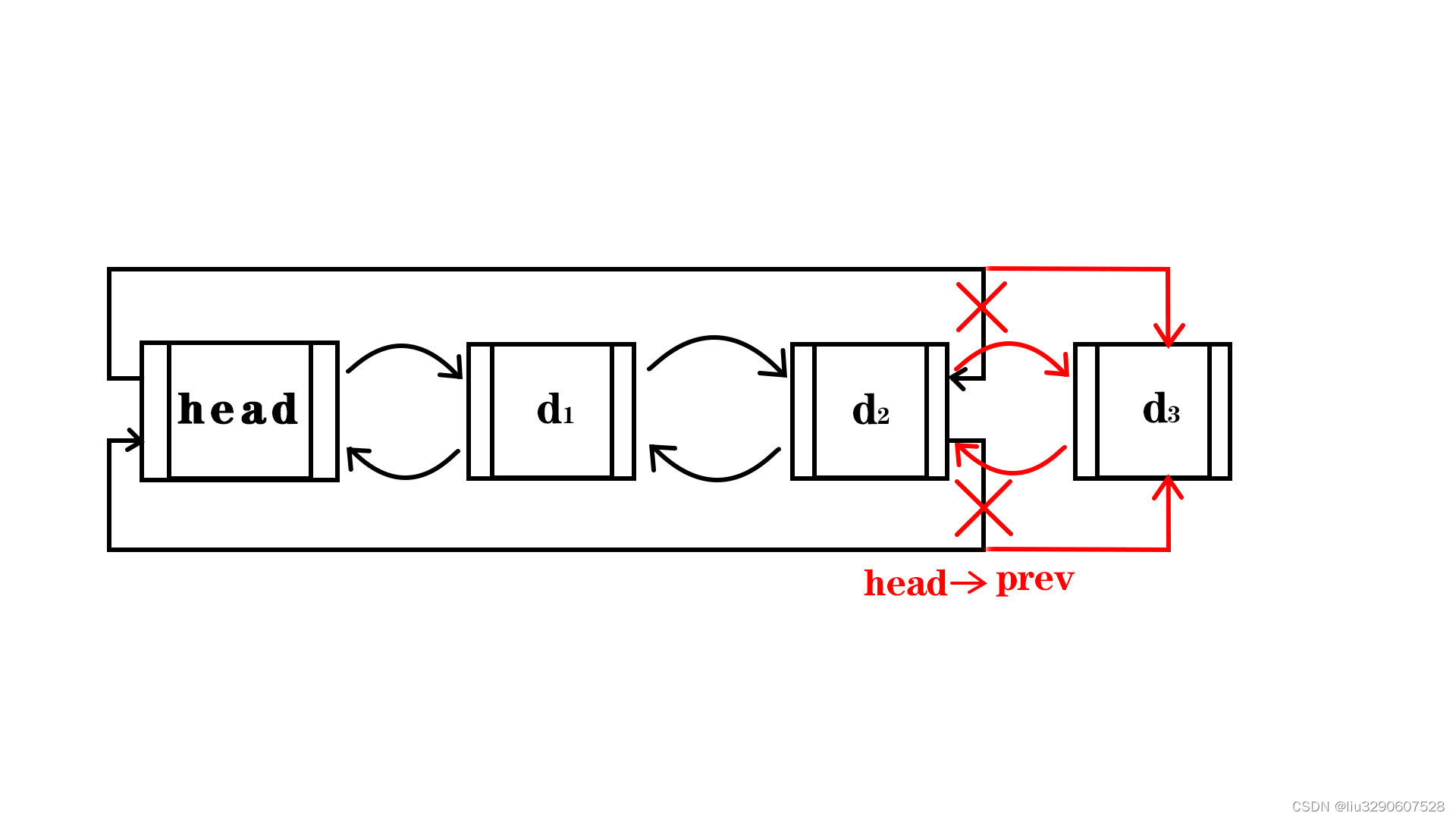
5.尾删
1.首先得保证有的删:即assert(phead&&phead->next)
2.记得删完后进行销毁操作
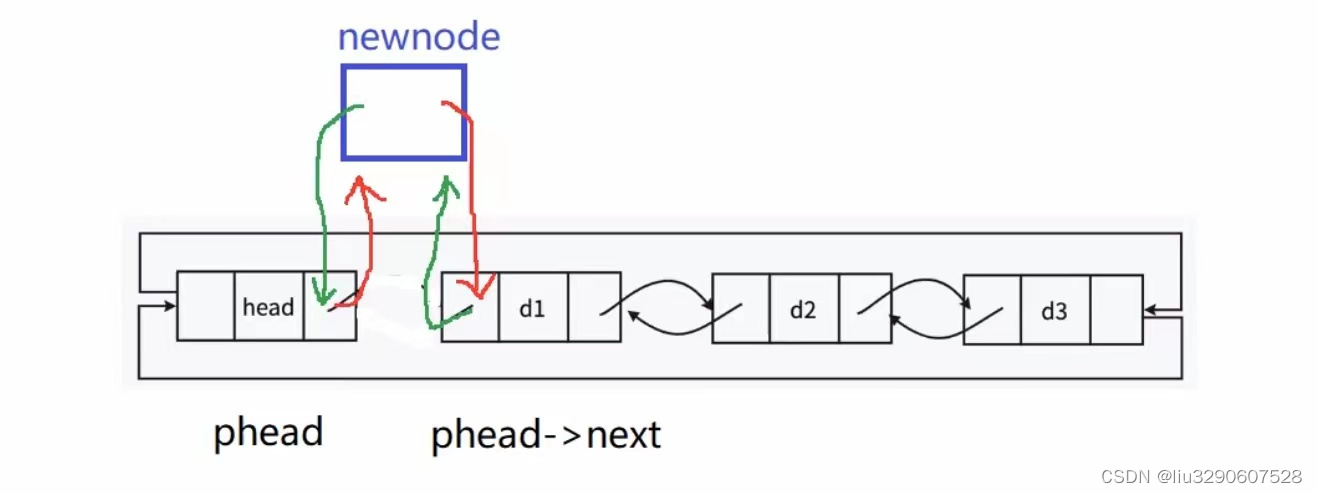
6.头插
1.头插不是在哨兵位前面,而是在哨兵位与第一个节点之间
2.进行节点连接前先定义插入节点的前置和后置指针,这样双向链表的指针关系不会被误改
3.注意改完后phead->next会不会改变,最好将其放到最后
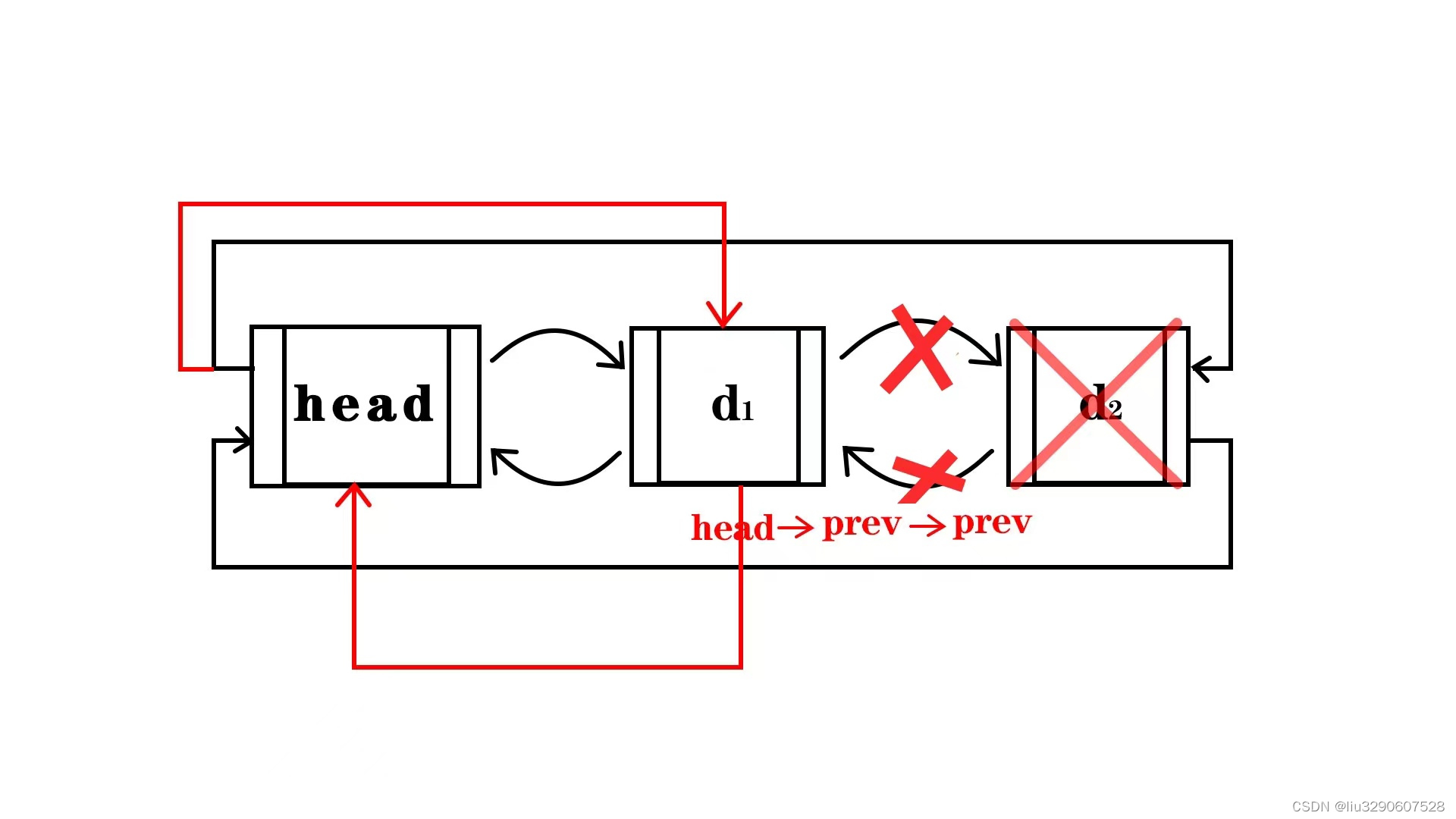
7.头删
8.查找
注意循环结束条件
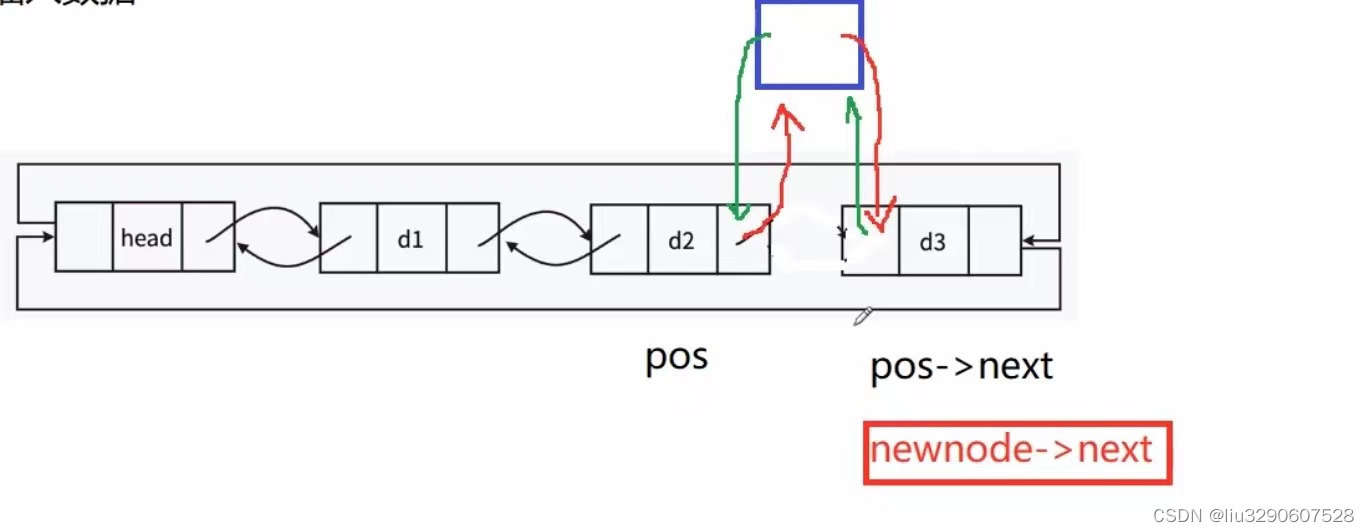
9.在指定位置之后插入数据
1.pos后必须得有数据:assert (pos&&pos->next);
2.进行节点连接前先定义插入节点的前置和后置指针,这样双向链表的指针关系不会被误改
3.注意改完后phead->next会不会改变,最好将其放到最后
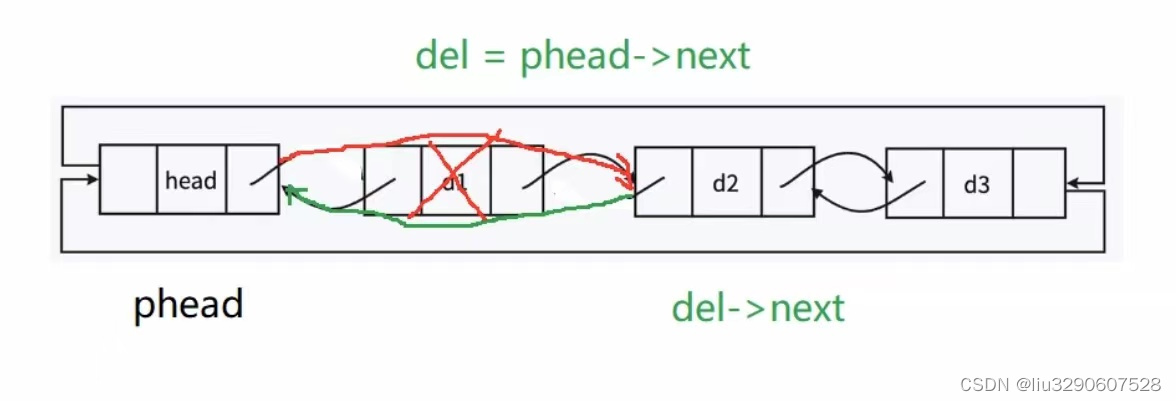
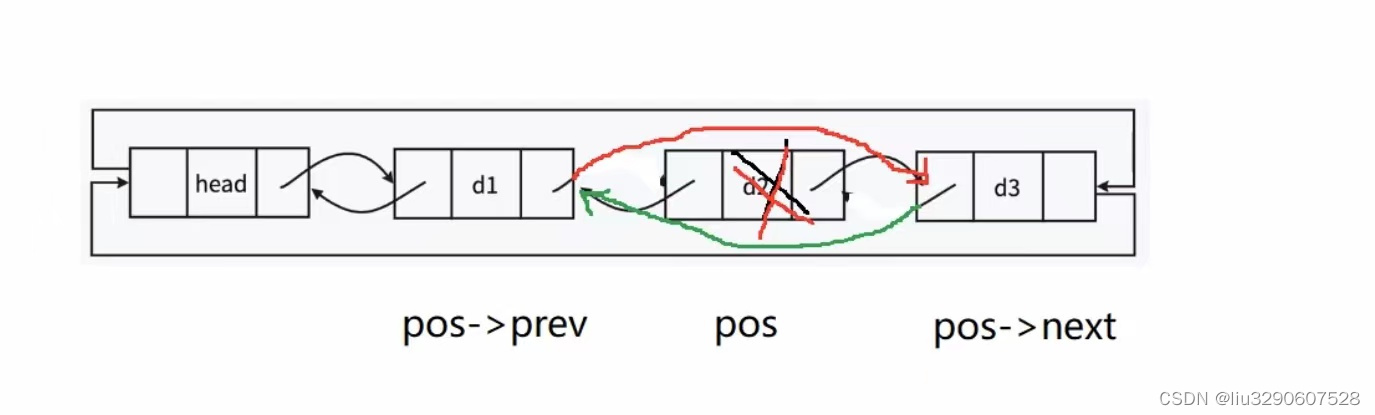
10.删除指定位置数据
代码
List.h
List.c

















 121
121






 到【灌水乐园】发言
到【灌水乐园】发言







