




大家好,我已经把优快云上的博客迁移到了知乎上,欢迎大家在知乎关注我的专栏慢慢悠悠小马车(https://zhuanlan.zhihu.com/duangduangduang)。希望大家可以多多交流,互相学习。
目录
Autonomous Driving in Urban Environments_Boss and the Urban Challenge
Motion Planning in Urban Environments_ Part I
Motion Planning in Urban Environments_ Part II
第4节 Planning Complex Maneuvers
Autonomous Driving in Urban Environments_Boss and the Urban Challenge
本文是DARPA冠军车“Boss”的系统介绍,主要涉及软件架构、运动规划(3个层次)、感知、错误恢复等模块。运动规划方法的具体细节,在下面的《Motion Planning in Urban Environments》2篇文献中。因本人主要关注决策规划,故只梳理了本文的部分内容。
第5节 Mission Planning
- 由路网信息,计算边的cost,构成graph,以规划mission。
- 车辆行驶过程中,路网图会更新,添加新观察到的数据。路网图应该只反映周边环境,故体量较小,重新规划较快。
- 堵塞(blockage)信息是变化的,车辆可能会revisit以前到过的地方,检查堵塞是否被清除了。当所有path都堵塞时,必须revisit。
- 探测堵塞的算法可能会漏过一些障碍物,如果发生这种情况,会添加一个虚拟blockage,其只能在车到达checkpoint时被消除。
- blockage前后设定为可以U-Turn,且赋予较低的cost,经过blockage给较高的cost,重新规划。
- revisit blockage通过逐步降低经过blockage的cost实现,并介绍了所使用的指数型cost更新函数。
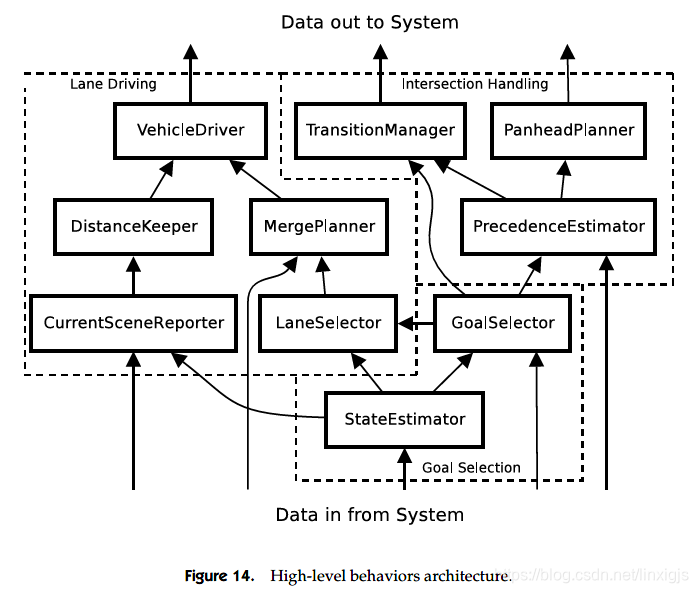
第6节 Behavioral Reasoning
- 环境上下文分3种:road,intersection,zone,相对应的行为也是3种:lane driving, intersection handling, achieving a zone pose。
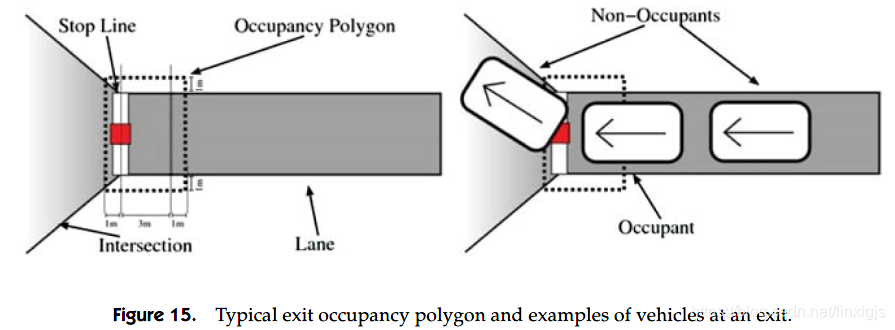
- precedence estimator 用来判断过路口的优先级,输入是静态的road model 和动态的障碍物信息。根据到达时间、占据多边形来判断优先级(顺序)。通过给到达时间调整bias值,造成右转优先的倾向。重点:将通过路口优先级的问题转变为——将占据多边形按照其修改后(bias)的到达时间升序排列的问题。
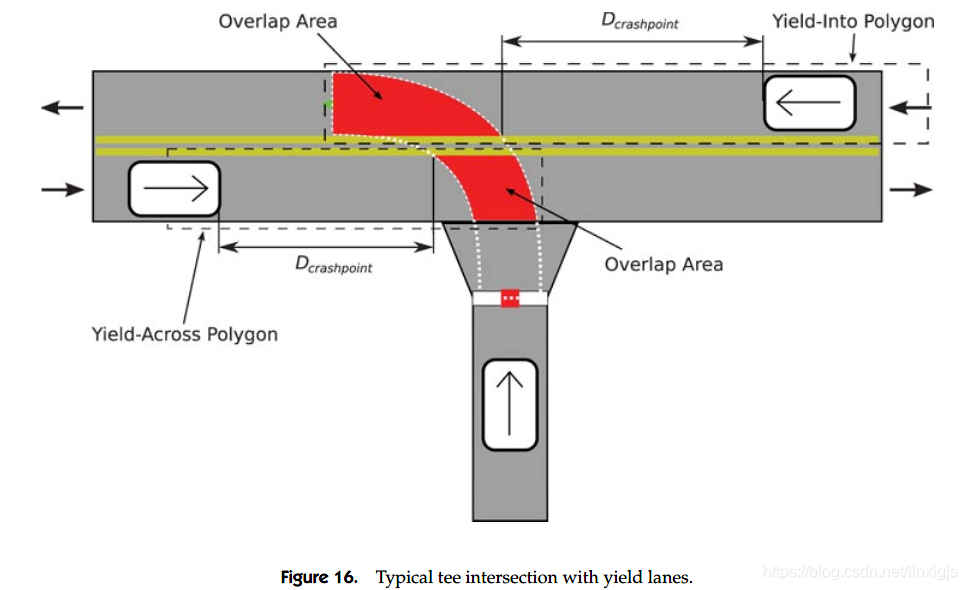
- precedence estimator 还用来merge或across 运动的车流。路口yield场景,需要根据预估的时间窗口计算yield polygon。具体细节看不懂。
- 交通堵塞的情景,自车先等15s,还不行就增加该路口的cost,规划另外前往goal的path。若规划失败,执行error recovery。
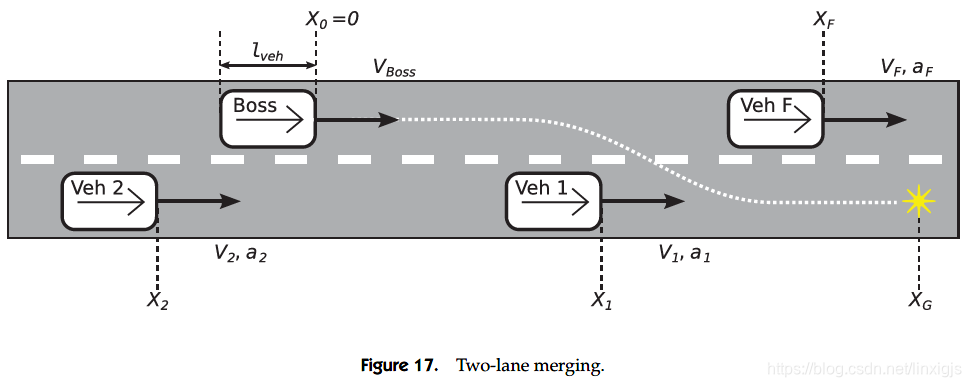
- merge plan 主要看自车车道是否满足merge过去的空间,目标车道各障碍物之前、之后、之间,是否满足自车merge过来的空间,是否在checkpoint之前,自车与merge目标点前后障碍物车的速度、加速度等指标是否合理、可行。然后在目标车道挑选最好的merge目标点。
- on-road failure, 按照某种原则(主要是距离)在附近选取一系列恢复点。若这些恢复点都不可达,则U-Turn或更激进的开下车道继续推进。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1515
1515

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









