




目录
一、拆解GO-1的核心:ViLLA架构如何让机器人拥有“内心戏”?
二、Genie Studio:把具身智能的开发门槛“一降到底”

🎬 攻城狮7号:个人主页
🔥 个人专栏:《AI前沿技术要闻》
⛺️ 君子慎独!
🌈 大家好,欢迎来访我的博客!
⛳️ 此篇文章主要介绍 智元机器人开源GO-1具身基座大模型
📚 本期文章收录在《AI前沿技术要闻》,大家有兴趣可以自行查看!
⛺️ 欢迎各位 ✔️ 点赞 👍 收藏 ⭐留言 📝!
前言:智元为何要送出免费的“机器人大脑”?
2025年9月23日,智元机器人做出了一个让整个行业为之震动的决定:全面开源其通用具身基座大模型GO-1(Genie Operator-1)。
这是一个什么概念?如果说今年1月,智元开源百万级真机数据集AgiBot World是把“教材”公开了,那么这次开源GO-1,就是直接把精心培养出来的“学霸的大脑”免费送给了全世界的开发者。在短短八个月内,从数据到模型,智元几乎将自己的核心技术积累公之于众。
这一举动之所以被称为“王炸”,是因为它直击了当前具身智能领域最大的痛点——技术门槛太高。
过去,一个团队想要研发具身智能机器人,需要跨越三座大山:
(1)海量高质量的数据:机器人需要通过真实世界的交互来学习,数据采集成本极高。
(2)复杂的模型算法:如何让模型理解模糊的人类指令,并转化为精确的物理动作,是世界级的难题。
(3)漫长的开发周期:从数据处理、模型训练到硬件适配、部署测试,整个流程耗时耗力。
而智元的开源,相当于直接帮你推平了这三座大山。它不仅提供了“机器人大脑”,还附赠了全套的开发工具,旨在让更多的研究者、开发者甚至爱好者,都能参与到这场通往通用人工智能的伟大征程中来。
一、拆解GO-1的核心:ViLLA架构如何让机器人拥有“内心戏”?
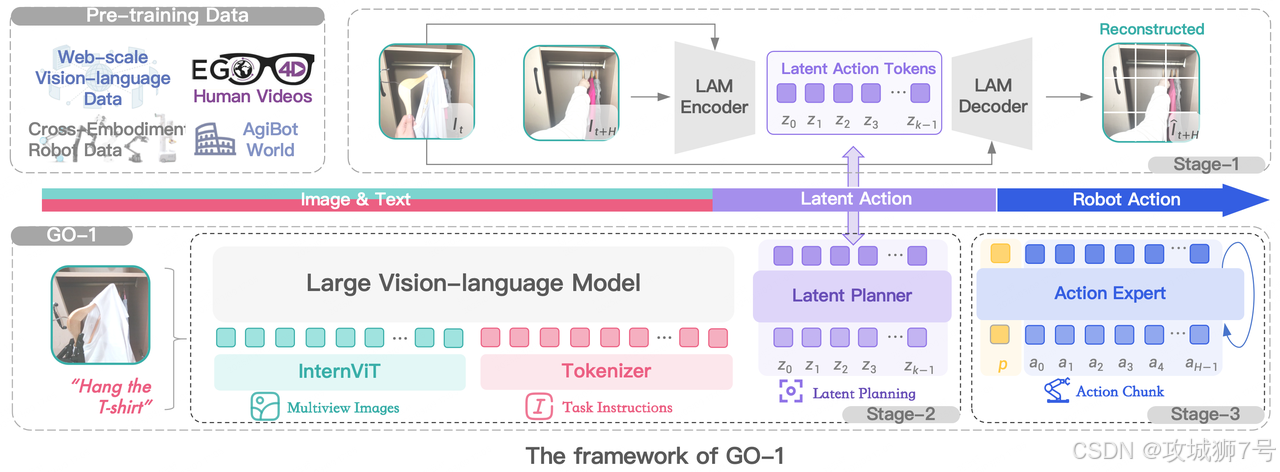
GO-1之所以强大,其根本在于它采用了全球首个Vision-Language-Latent-Action (ViLLA)架构。要理解ViLLA的精妙之处,我们得先看看它前辈VLA(Vision-Language-Action)架构的局限。
1.1 VLA的局限:机器人为何常常“答非所问”
传统的VLA架构,工作模式很直接:机器人“看到”场景(Vision),“听到”指令(Language),然后直接输出一个动作(Action)。这就像一个没有感情的翻译机器,把“请帮我倒杯水”直接翻译成一系列关节角度的转动。
这种模式在简单任务中尚可,但一旦任务变得复杂,比如“把桌子收拾干净”,机器人就容易“蒙圈”。因为它缺乏一个中间的思考和规划过程,很难理解“收拾干净”这种抽象概念背后需要一系列怎样的子任务(拿起杯子 -> 走到水槽 -> 扔掉垃圾 -> 擦拭桌面)。结果就是动作僵硬、错误频出,看起来非常“不智能”。
1.2 ViLLA的创新:引入“隐式动作标记”
ViLLA架构天才般地在“感知”和“行动”之间,加入了一个“隐式规划器”(Latent Planner)。你可以把它理解为机器人的“内心戏”或者“草稿纸”。
当机器人接收到“悬挂衣服”的指令时,它不再是直接去动胳膊,而是先在脑子里进行一次“预演”,生成一串低维度的、具有语义的“暗号”,也就是“隐式动作标记”(Latent Action)。这串暗号可能就代表了:“第一步,识别并抓住衣领;第二步,找到并定位衣架挂钩;第三步,调整姿态将衣领挂上去”。
这个过程,成功地弥合了“人类的模糊意图”和“机器人的精确动作”之间的巨大鸿沟。机器人通过这段“内心戏”,先把复杂任务拆解成了自己能理解的逻辑步骤,然后再去执行。
1.3 三层协同:看懂、规划、执行的精妙配合
ViLLA架构的强大,源于其内部三个“专家”的无缝协作:
(1)VLM多模态理解层(眼睛和耳朵):基于强大的InternVL-2B模型构建,它负责感知世界。它不仅能看懂多视角的图像,还能理解人类的自然语言指令,甚至能感知到力觉信号(比如抓握物体时的力度),为后续决策提供全面的信息输入。
(2)Latent Planner隐式规划器(决策大脑:这是ViLLA架构的核心。它接收来自理解层的信息,进行高层次的思考和规划,生成前文提到的“隐式动作标记”。它是机器人的“军师”,负责制定战略。
(3)Action Expert动作专家(灵巧的双手):这个专家依托于先进的扩散模型技术。它唯一的任务就是把“决策大脑”给出的“隐式动作标记”(战略),翻译成高频率、高精度的具体动作序列(战术执行)。比如,如何平滑地转动关节、如何以恰当的力度拧开瓶盖、如何灵巧地折叠衣物,都由它来负责。
通过这三层的精妙配合,GO-1在面对复杂任务时,表现得远比传统模型更加智能、流畅和精准。
二、Genie Studio:把具身智能的开发门槛“一降到底”
如果说GO-1模型是那个强大的“大脑”,那么Genie Studio就是配套的“一站式开发平台”,它的目标只有一个:让开发者用上这个大脑的过程,变得前所未有的简单。

Genie Studio提供了一个全栈式的解决方案,覆盖了从数据到部署的全流程:
(1)开箱即用:平台直接内置了GO-1基座模型,开发者无需从零开始训练。
(2)全套工具链:集成了数据采集、管理、模型微调、仿真评测、部署等所有必需的工具,开发者无需再为拼凑各种工具而烦恼。
(3)高效训练与部署:集成了Video Training方案和统一的训练框架,甚至支持“真机一键编译与部署”,极大地缩短了开发周期。
可以说,Genie Studio的存在,让具身智能的开发从“专家模式”切换到了“普通模式”,为技术的快速普及和应用创新铺平了道路。
三、是骡子是马?GO-1的跨平台实战表现
一个模型的好坏,最终要靠实践来检验。GO-1虽然仅基于智元自家的AgiBot G1机器人数据进行预训练,但其展现出的泛化和适应能力令人印象深刻。
(1)强大的可移植性:智元团队在松灵机器人、方舟机器人、Franka机械臂等多种不同的机器人硬件上成功验证了GO-1。结果表明,该模型能够很好地适应不同机器人的运动学特性和控制接口,具备极佳的“跨平台”能力。
(2)仿真与真机性能领先:
在GenieSim和Libero等主流仿真平台的评测中,GO-1的总分和关键任务得分均保持领先,展现了对复杂场景的强大适应力。


在真机实验中,GO-1在“清理餐桌”、“倒水”、“补货”等日常任务中的表现,也全面优于其他SOTA(当前最佳)模型。
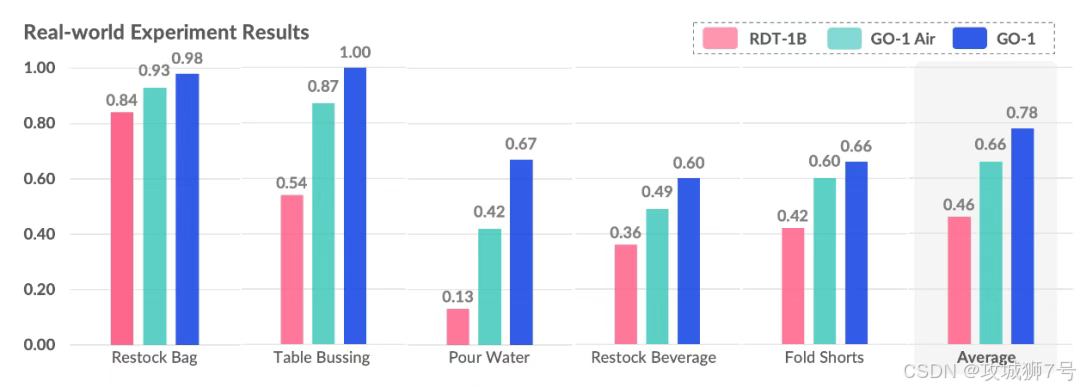
这些数据直观地证明了GO-1并非“实验室里的花瓶”,而是一个具备强大实战能力的通用具身基座大模型。
四、开源背后的阳谋:构建一个低门槛、高协同的具身智能生态
从开源AgiBot World数据集,到发起“Genie Trailblazer”全球人才招募计划,再到如今全面开源GO-1模型,智元的战略意图已经非常清晰:通过“资源开放 + 人才聚合”的双重布局,构建一个全球性的、低门槛、高协同的具身智能生态。
这是一种非常聪明的“阳谋”。智元深知,具身智能的终极突破,绝非一家公司可以独立完成。通过将自己的核心资源开放出来,可以:
(1)吸引全球顶尖智慧:让全世界的研究者和开发者都能在这个强大的基座模型上进行创新,加速技术的迭代。
(2)构建事实上的标准:当越来越多的开发者基于GO-1和Genie Studio进行开发时,这套技术栈就有可能成为行业的事实标准,形成强大的生态护城河。
(3)反哺自身发展:社区的创新和反馈,将源源不断地为智元自身的技术发展提供养料。
结语:当“机器人大脑”可以免费下载
智元GO-1的开源,无疑是具身智能发展史上的一个重要里程碑。它就像当年Google推出安卓系统一样,极大地降低了行业的准入门槛,让创新的火花可以在更广阔的土壤上迸发。
虽然我们离电影中那种能与人自由对话、无所不能的通用机器人还有很长的路要走,但GO-1的出现,让我们看到了一个清晰的、可行的技术路径。随着高质量数据、成熟模型与全球顶尖研究力量的深度融合,具身智能真正走进我们生活的未来,或许已不再遥远。
GitHub 地址:
https://github.com/OpenDriveLab/AgiBot-World
Huggingface 地址:
https://huggingface.co/agibot-world/GO-1
论文:
https://arxiv.org/abs/2503.06669
看到这里了还不给博主点一个:
⛳️ 点赞☀️收藏 ⭐️ 关注!
💛 💙 💜 ❤️ 💚💓 💗 💕 💞 💘 💖
再次感谢大家的支持!
你们的点赞就是博主更新最大的动力!



















 1873
1873









 到【灌水乐园】发言
到【灌水乐园】发言









