




Python Kdtree 使用示例
一、关于 KDTree
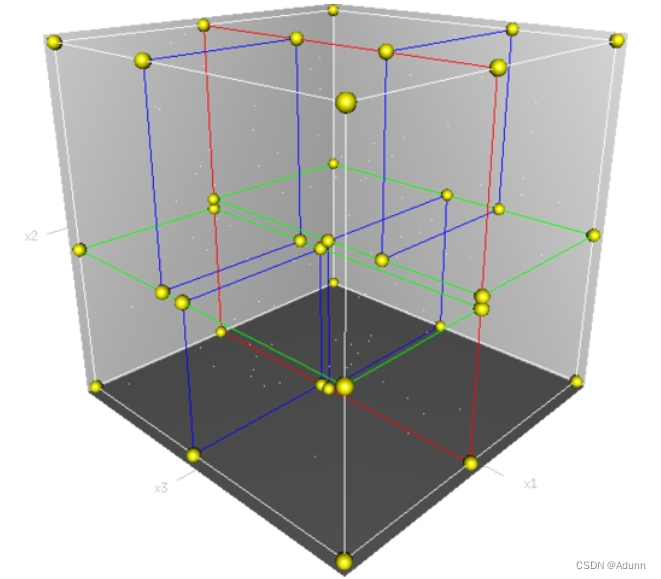
- 点云数据主要是, 表征 目标表面 的海量点集合, 并不具备传统实体网格数据的几何拓扑结构。
- 点云数据处理中最为核心的问题就是, 建立离散点间的拓扑关系, 实现基于邻域关系的快速查找。
- KDTree,即k-dimensional tree,是一种高维索引树形数据结构,常用于在大规模的高维数据空间进行最近邻查找(Nearest Neighbor)和近似最近邻查找(Approximate Nearest Neighbor),例如图像检索和识别中的高维图像特征向量的K近邻查找与匹配。
- KDTree的每一级(level)在指定维度上分开所有的子节点。在树的根部,所有的子节点在第一个维度上被分开(第一维坐标小于根节点的点将被分在左边的子树中,大于根节点的点将被分在右边的子树中)。树的每一级都在下一个维度上分开,所有其他的维度用完之后就回到第一个维度,直到你准备分类的最后一个树仅仅由有一个元素组成。
二、关于最近邻搜索
给定点p,查询数据集中与其距离最近点的过程即为最近邻搜索。
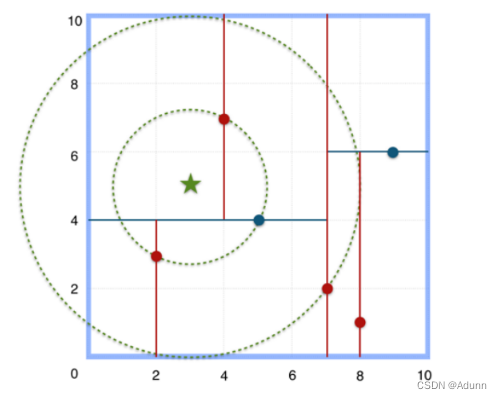
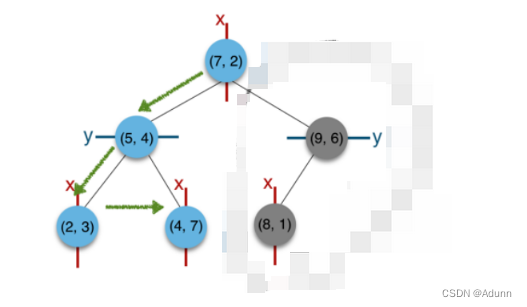
如在构建好的k-d tree上搜索(3,5)的最近邻时:
(1)首先从根节点(7,2)出发,将当前最近邻设为(7,2),对该k-d tree作深度优先遍历。以(3,5)为圆心,其到(7,2)的距离为半径画圆(多维空间为超球面),可以看出(8,1)右侧的区域与该圆不相交,所以(8,1)的右子树全部忽略。
(2) 接着走到(7,2)左子树根节点(5,4),与原最近邻对比距离后,更新当前最近邻为(5,4)。以(3,5)为圆心,其到(5,4)的距离为半径画圆,发现(7,2)右侧的区域与该圆不相交,忽略该侧所有节点,这样(7,2)的整个右子树被标记为已忽略。
(3) 遍历完(5,4)的左右叶子节点,发现与当前最优距离相等,不更新最近邻。所以(3,5)的最近邻为(5,4)。
三、复杂度分析
- 新增节点:平均复杂度为O(logn),最坏复杂度O(n);
- 删除节点:平均复杂度为O(logn),最坏复杂度O(n);
- 最近邻搜索: 平均复杂度为O(logn) ,最坏复杂度O(n);
四、python实现的简化版构建k-d tree(k=2)
# -*- coding:utf-8 -*-
import numpy as np
class KdNode:
"""kd tree中的一个点,属性包括
x:这个点的x值
y:这个点的y值
level:第几级树
right:右节点
left:左节点"""
def __init__(self, x, y, level):
self.x = x
self.y = y
self.level = level
self.right = None
self.left = None
class KdTree:
def __init__(self):
self._node = None
# 初始化一个节点为None
def insert(self, x, y):
if self._node is None:
self.add(x, y, node=self._node, 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 6624
6624

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











