




四轴飞控DIY调试起飞简明步骤
调试起飞简明步骤
DIY飞控,组装完了,接下去的步骤就是试飞,但是DIYer的角度远非机械组装就能够满足的,现在的DIY也不仅仅只是组装还有更多的考量内容,这里我们枚举一下在试飞之前需要的步骤:
- 飞控配置(含信号完整性测试)
- 试飞目标
- 试飞方法
- 试飞回顾
注:配置就一笔带过了。为了减少炸机的可能性并且根据一手试飞感悟,记录和保存这台Kakute F7 AIO F450试飞的问题并总结了一些经验,希望有类似问题的朋友也可以多多指点!
Step1:飞控配置
当然飞控固件烧录、配置,以及信号完整性测试必须在试飞之前完成,不同的飞控所用到的配置工具和信号完整性测试都不太一样.
注:网上这方面的文章和视频非常多,百度和Google下大体上都能搞定。这里就不在赘述。
【1】BetaFlight配置
【2】APM配置:英文说明,中文说明
【3】PixHawk配置:英文说明,中文说明
Step2:试飞目标
调试起飞,并不是为了验证飞控操作熟练度或者花式飞行效果,主要是为了测试DIY模型是否具备基本的飞行能力。
关于这里提及的“基本飞行能力”怎么理解?主要还是根据四轴运动原理来考量,如果这几个基本动作OK,试飞目标就达成!
【1】Drones | The complete flight dynamics
【2】Basic Physics of Drones
注:上面两个视频从完整飞行动力学和物理基础分析了四轴运动原理。
测试内容
好,试飞测试内容确定如下:
- 升降(Throttle)
- 偏航(yaw)
- 俯仰(Pitch)
- 翻滚(Roll)
- 悬停(hover)
- 自稳(angle/auto)
坐标系
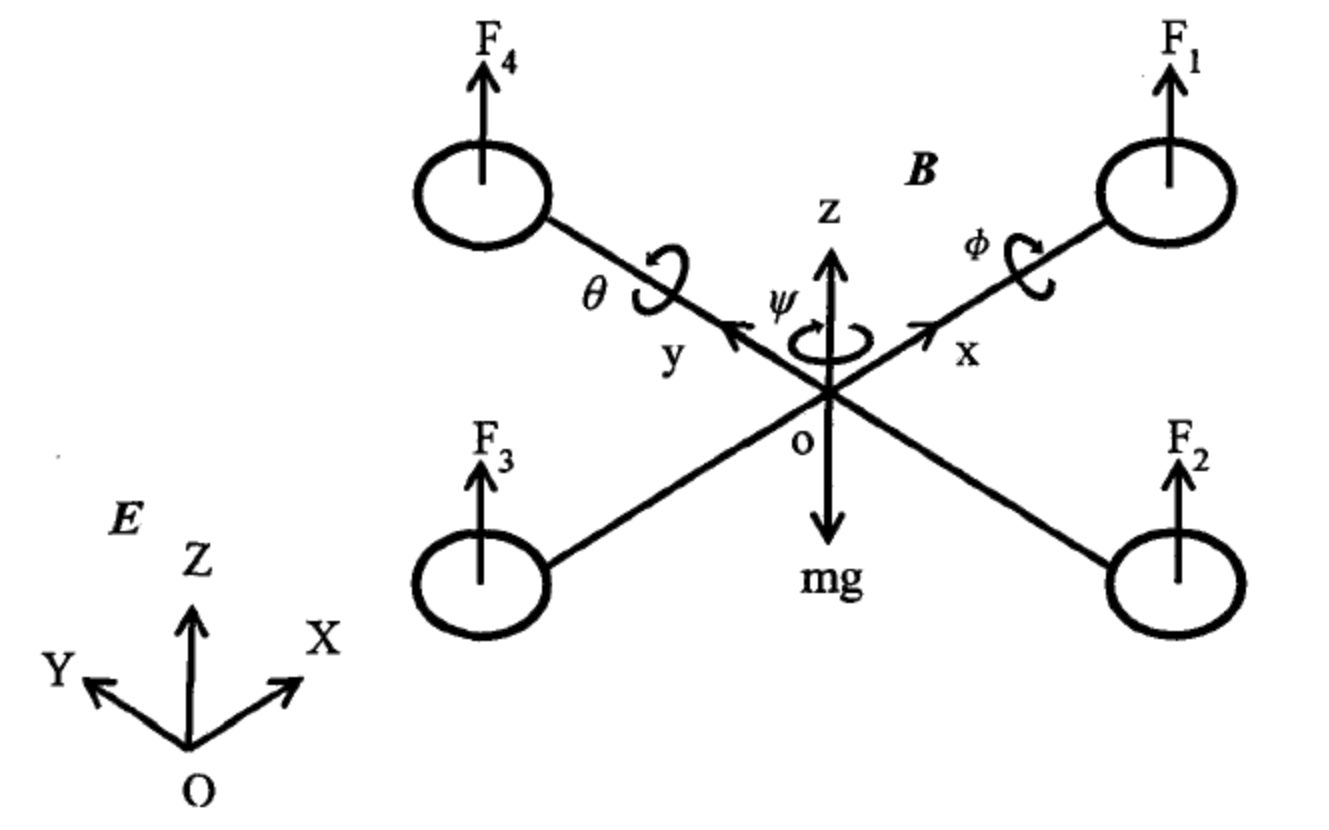
- 惯性坐标系E(X,Y,Z)代表物体在三维空间中的位置。
- 机体坐标系B( ϕ \phi ϕ, θ \theta θ, ψ \psi ψ)代表飞机绕X,Y,Z轴旋转的角度。
设飞行器机头朝向X轴正方向,飞机在XOY平面内,Z轴正方向是飞行器上方,则三个角欧拉 ϕ \phi ϕ, θ \theta θ, ψ \psi ψ表示为:
-
俯仰角(pitch) θ \theta θ:机体轴与地平面(水平面)之间的夹角,飞机抬头为正;
-
偏航角(yaw) ψ \psi ψ:机体轴在水平面上的投影与地轴之间的夹角,以机头右偏为正,又称方位角;
-
滚转角(roll) ϕ \phi ϕ:飞机对称面绕机体轴转过的角度,右滚为正,又称倾斜角。
Step3:试飞方法
估计Step2看了,都有跃跃欲试的感觉,其实我也是的。
从慎重细致的安全问题出发,就要好好思考一下,上面试飞内容就是直接上个空地去飞一下嘛?
当然,飞一下结果就很明朗了,但是安全问题:
- 会不会方向失控?
- 会不会失控空中坠落?
- 如何知道电池不够需要降落?
- 如果不稳定,降落如何操作?
- 碰到车,人,这些危险后果如何处理?
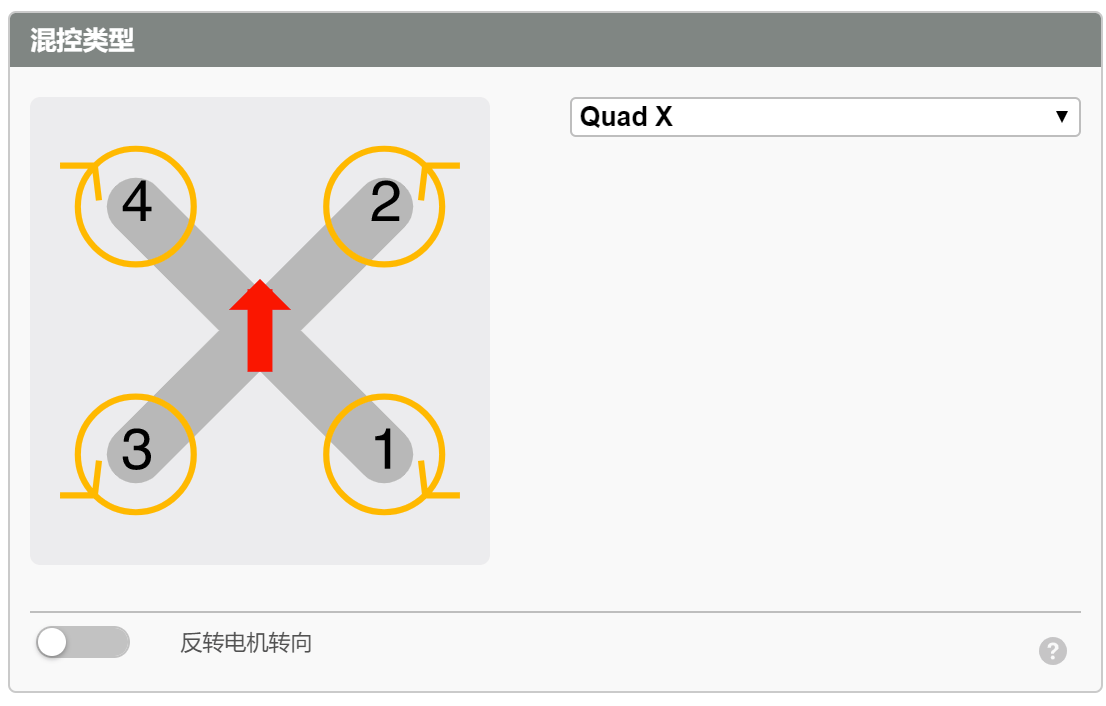
- 正旋电机:#1 #4
- 反旋电机:#2 #3
- 前端电机:#2 #4
- 后端电机:#1 #3
- 左侧电机:#3 #4
- 右侧电机:#1 #2
1.升降(Throttle)
从飞行动力学原理上,升降背后的原理:电机带动桨叶克服重力做功。
- 升:四个电机,同时以相同的速度加速
- 降:四个电机,同时以相同的速度减速
测试方法A:电机不上桨叶
- 推油门,四个电机能否相同速度加速
- 拉油门,四个电机能否相同速度减速
- 油门最低,四个电机是否与解锁时速度一致
测试方法B:电机上桨叶,不离地
- 推油门,四个电机能否相同速度加速,【四个电机方向都有趋势上升】
- 拉油门,四个电机能否相同速度减速,四轴整体下降
2.偏航(yaw)
从飞行动力学原理上,偏航背后的原理:电机带动桨叶扭矩促使四轴围绕Z轴转向。
测试方法A:电机不上桨叶
- 往左推:正旋电机加速,反旋电机减速
- 往右推:正旋电机减速,反旋电机加速
- 回归中位:正、反旋电机转速一致
测试方法B:电机上桨叶,不离地
- 往左推:正旋电机加速,反旋电机减速,【四轴逆时针旋转趋势】
- 往右推:正旋电机减速,反旋电机加速,【四轴顺时针旋转趋势】
3.俯仰(Pitch)
从飞行动力学原理上,俯仰背后的原理:通过前端电机、后端电机带动桨叶,抬升或者下沉机身,促使四轴通过牛顿力学将提升力的部分分解到,前进和后退方向,此时如果是悬停状态,需要补充油门动力以弥补对抗重力的需求。
测试方法A:电机不上桨叶
- 往前推:前端电机减速,后端电机加速
- 往后拉:前端电机加速,后端电机减速
- 回归中位:前、后端电机转速一致
测试方法B:电机上桨叶,不离地
- 往前推:前端电机减速,后端电机加速,【四轴前倾趋势】
- 往后拉:前端电机加速,后端电机减速,【四轴后仰趋势】
4.翻滚(Roll)
从飞行动力学原理上,翻滚背后的原理:通过左侧电机、右侧电机带动桨叶,抬升或者下沉机身,促使四轴通过牛顿力学将提升力的部分分解到,左倾和右倾方向,此时如果是悬停状态,四轴将侧倾,并丢失高度下降。
测试方法A:电机不上桨叶
- 往左推:左侧电机减速,右侧电机加速
- 往右推:左侧电机加速,右侧电机减速
- 回归中位:左、右侧电机转速一致
测试方法B:电机上桨叶,不离地
- 往左推:左侧电机减速,右侧电机加速,【四轴左倾趋势】
- 往右推:左侧电机加速,右侧电机减速,【四轴右倾趋势】
5.悬停(hover)& 自稳(angle/auto)
从飞行动力学原理上,悬停背后的原理:通过四个电机提高转速克服重力,当电机提供的提升拉力等于重力,此时四轴悬停。由于四轴CG(Centre of Gravity)不一定完美,因此,需要适当配合俯仰,翻滚来调整自身稳定的空中定点悬停。
测试方法A:电机不上桨叶,无法测试
测试方法B:电机上桨叶,不离地
测试方法C:电机上桨叶,离地(50cm~1米)
- 打开自稳模式,推油门+遥控器微调+手动微调控制,确保空中定点悬停
上述试飞方法从安全性角度,最大限度降低风险,提前发现问题:
- 测试方法A采用的电机转速判断【不会伤人】;
- 测试方法B采用带桨叶,不离地四轴趋势判断【适当距离,局域可控】;
- 测试方法C采用带桨叶,离地(50cm~1米)【低空综合测试,局域可控】;
Step4:试飞回顾
总体上看,上述方法可以将危险降到最低,同时在正式起飞前,能比较早期的发现问题,及时解决。
同时也再次提醒,由于电机转速将近10K RPM(Revolutions Per Minute),所以非常容易伤人。
整个实验过程发现了一些问题:
- 正反电机装错位置,导致桨叶旋转脱落,未达到锁紧效果(发生在电机与电调接线重新插拔后错误接线)
- 解锁后,测试方法B,主要是看趋势,要确保油门不要将飞机起飞。比如:前后(Pitch),后端或者前端两个螺旋桨转速加速,抬起;左右(Roll),左侧或者右侧两个螺旋桨转速加速,抬起;观察飞机能否有正确运动趋势
注:前提是飞控固件参数配置时,throttle,yaw,pitch,roll遥控器动作方向与PC配置软件上方向一致。如果不一致需要在遥控器上调整舵机方向(正向/反向) - 缓慢推动油门,观察飞机是否会在抬升过程直接翻滚过来。通常是电机旋转方向或者桨叶安装正反向方向问题(如果是锁紧螺母固定的桨叶,容易出现问题;自锁紧桨叶通常由于电机转向前面已经确认过,不太会出现上述问题)。
- 四轴起飞发现出现一边飘逸,可能由于以下因素导致:微风、水平校准陀螺仪未校准(有一定角度倾斜)
- 飞机出现振动或者不稳定,通常是PID调教问题。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









