







一、读取摇杆数值
为了使用ESP32读取XY摇杆的值,可以按照以下步骤操作。这里使用Arduino IDE进行编程。
所需材料
- ESP32开发板
- 摇杆模块
- 面包板和跳线
接线
- 将摇杆模块的VCC连接到ESP32的3.3V,GND连接到ESP32的GND。
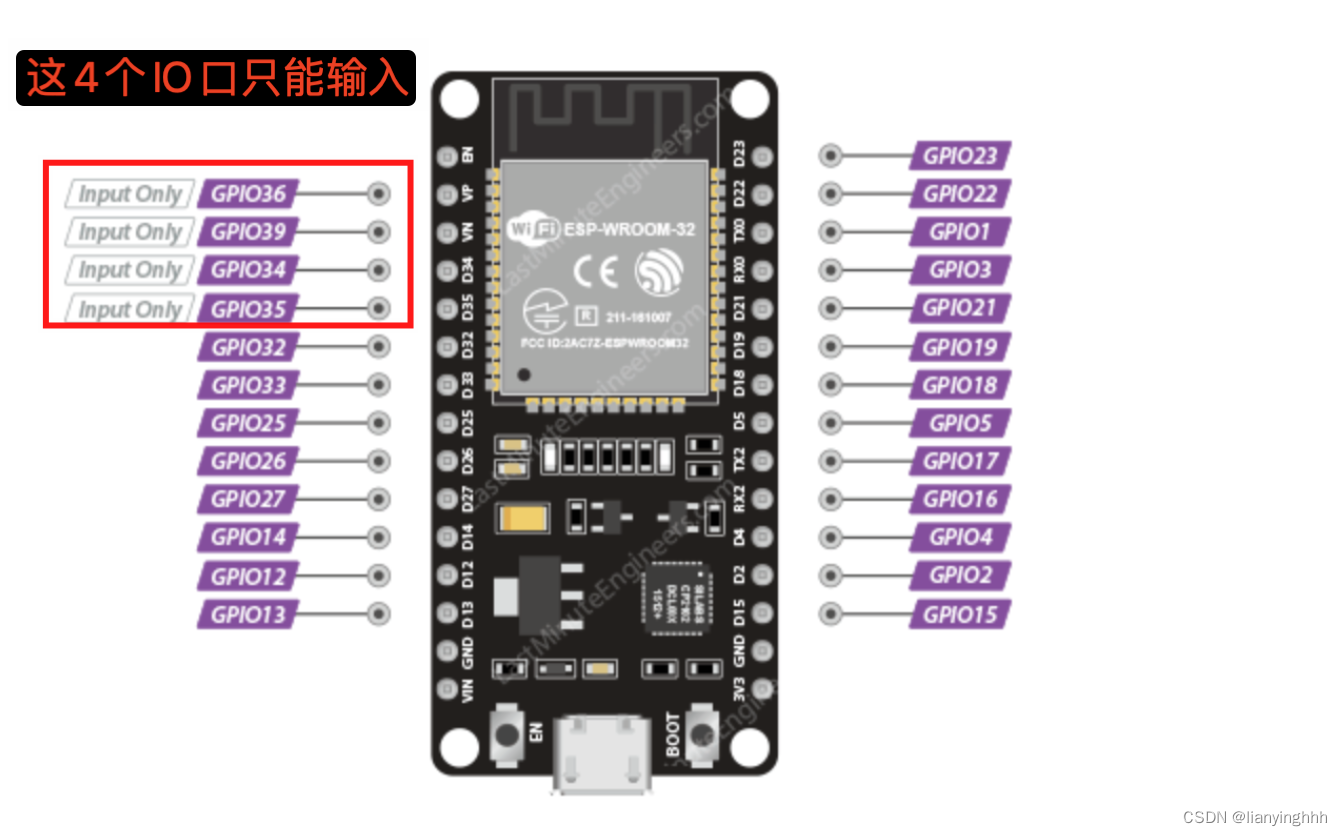
- 将摇杆模块的VRx连接到ESP32的GPIO 34(可以选择任意ADC引脚),VRy连接到GPIO 35。!!!!注意注意,35、34、36、39只能输入,别踩坑
- 如果需要读取摇杆按键状态,可以将SW引脚连接到ESP32的一个数字输入引脚。
代码
int VRx = 34; // X轴引脚
int VRy = 35; // Y轴引脚
int SW = 32; // 按键引脚
void setup() {
Serial.begin(115200);
pinMode(VRx, INPUT);
pinMode(VRy, INPUT);
pinMode(SW, INPUT_PULLUP); // 如果使用按键引脚
}
void loop() {
int xValue = analogRead(VRx); // 读取X轴的值
int yValue = analogRead(VRy); // 读取Y轴的值
int swState = digitalRead(SW); // 读取按键状态(如果有)
// 打印读取的值
Serial.print("X-axis: ");
Serial.print(xValue);
Serial.print(" | Y-axis: ");
Serial.print(yValue);
Serial.print(" | Switch: ");
Serial.println(swState);
delay(500); // 延迟0.5秒
}
解释
int VRx = 34;和int VRy = 35;分别定义了摇杆的X轴和Y轴引脚。int SW = 32;定义了摇杆按键引脚(如果使用)。- 在
setup()中初始化串口通信,并设置引脚模式。 - 在
loop()中,使用analogRead()读取摇杆的X轴和Y轴的模拟值,并使用digitalRead()读取按键状态。 - 打印读取的值到串口监视器。
调试与调整
- 检查接线是否正确。
- 确保摇杆模块的VCC和GND正确连接。
- 如果读取的值不正确或有噪声,可以尝试增加电源滤波电容。
这样,通过读取摇杆模块的X轴和Y轴的值,你可以在ESP32上实现各种与摇杆相关的控制和互动功能。
二、控制舵机
这里使用别人封装好的库,因为用pwm脉冲信号周期控制太麻烦了(不过可以控制LED做呼吸灯)
下一步试一下吧
使用ESP32Servo.h库来控制舵机,可以简化控制舵机的代码,并与读取摇杆的值结合起来实现更方便的控
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3476
3476

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









