



 本文介绍了在Matlab中解决一维非线性优化问题的方法,包括进退法、黄金分割法、斐波那契法、牛顿法和割线法,并详细讲解了fminbnd函数的使用,通过实例展示了如何应用这些方法寻找目标函数的极值点。
本文介绍了在Matlab中解决一维非线性优化问题的方法,包括进退法、黄金分割法、斐波那契法、牛顿法和割线法,并详细讲解了fminbnd函数的使用,通过实例展示了如何应用这些方法寻找目标函数的极值点。
前言
在实际建模过程中由于诸多因素的影响,其目标函数或约束条件很难用线性关系式表达,针对此类非线性问题的优化称为非线性规划问题,其基本定义为一个n元函数在一组等式或不等式的约束条件下的极值问题,且目标函数和约束条件至少有一个是未知量的非线性函数。而其中寻求一元函数在某区间上的极点的优化方法,称为一维优化问题。
一维最优化方法
在将实际的物理问题抽象为数学模型时,一般按以下步骤来分析:
1)确定自变量;
2)确定优化目标;
3)确定约束条件;
4)确定自变量范围;
而非线性规划问题的一般形式可以表示为:
其中,称为模型的决策变量,
称为目标函数,
和
称为约束函数,前者为等式约束,后者为不等式约束。
常见的一维最优化方法主要有黄金分割法、切线法、插值法等,其基本遵循一个思想:
从某一个出水点出发,沿某个适当选择的方向
(通常为目标函数的下降方法)进行搜索,得到目标值较小的点
;再从
出发,沿选择的方向
进行搜索,得到比目标函数更小的点
。
而如何确定目标函数下一次的寻优方向,我们以来表示。而针对一维最优化问题,实质上转化成求解步长因子
的极值问题。
而针对一维搜索问题的基本步骤,常见如下:
1)确定搜索区间;
2)采用逐步缩小区间的方法或函数逼近,确定函数的极值点。
常见的方法主要有进退法、黄金分割法、斐波那契法、牛顿法、割线法等。
进退法
进退法的基本思想是指:
单谷函数,其极小值位于搜索区间[a,b]内,对于任意的
,如果
,则
为极小点的搜索区间;如果
,则
为极大点的搜索区间。
进退法的代码示例如下,仅供参考:
function [min_x,max_x]=minJT(f,x0,h0,eps)
% the opotimum method of advance and retreat
% 进退法是用来确定搜索区间的算法
% 本次自定义函数 目的是为了寻求极小值的区间
% 目标函数f
% 初始点x0
% 精度eps
if nargin==3
eps=1E-6;
end
x1=x0;
k=0;
h=h0;
while 1
x4=x1+h;
k=k+1;
f4=subs(f,symvar(f),x4);
f1=subs(f,symvar(f),x1);
if f4<f1
x2=x1;
x1=x4;
f2=f1;
f1=f4;
h=2*h;
else
if k==1
h=-h;
x2=x4;
f2=f4;
else
x3=x2;
x2=x1;
x1=x4;
break
end
end
end
min_x=min(x1,x3);
max_x=x1+x3-min_x;
end
黄金分割法
黄金分割法的基本思想与进退法基本一致,其对的取值做出了如下要求:
其中,取0.618。
黄金分割法的代码示例如下,仅供参考:
function [x,minf]=minHJ(f,a,b,N,eps)
% golden section method - 黄金分割法
% 该算法的做法是选择x1和x2,使得两点在区间[a b]上的位置是对称的;
% 同时满足,新区间内的点x3要求与区间内已有的点相对于搜索区间是对称的。
% 目标函数f
% 极值区间左端点a
% 极值区间右端点b
% 精度eps
% 目标函数取极小值时的自变量x
% 目标函数的极小值minf
if nargin==3
N=10000;
eps=1E-6;
elseif nargin==4
eps=1E-6;
end
l=a+0.382*(b-a);
u=a+0.618*(b-a);
k=1;
tol=b-a;
while tol>eps && k<N
fl=subs(f,symvar(f),l);
fu=subs(f,symvar(f),u);
if fl>fu
a=l;
l=u;
u=a+0.618*(b-a);
else
b=u;
u=l;
l=a+0.382*(b-a);
end
k=k+1;
tol=abs(b-a);
end
if k==N
disp('找不到最小值')
x=NaN;
minf=NaN;
return
end
x=(a+b)/2;
minf=double(subs(f,symvar(f),x));
end
斐波那契法
斐波那契法与黄金分割法基本思想一致,但其针对的取值不同:
,其中
为第n个斐波那契数。
斐波那契法的代码示例如下,仅供参考:
function [min_x,min_s,a,b]=fibonacci(s,a0,b0,eps)
% 斐波那契法:1,1,2,3,5,8,13,21,34,55,89,……
% 当用斐波那契法以n个探索点缩短某一区间时,区间长度第一次缩短为Fn-1/Fn,
% 其后各次分别为Fn-2/Fn-1、Fn-2/Fn-3、……、F1/F2。
% 即:区间[a b]内取两点t1,t2,满足t1=a+Fn-1/Fn*(b-a),t2=a+Fn-2/Fn*(b-a)
% 目标函数f(符号表达式)
% 极值区间左端点a0
% 极值区间右端点b0
% 精度eps
% Output:分割后的极值区间左端点a
% Output:分割后的极值区间右端点b
% Output:极小值对应的自变量min_x
% Output:极小值min_s
fn=floor((b0-a0)/eps)+1;
f0=1;
f1=1;
n=1;
while f1<fn
f2=f1;
f1=f1+f0;
f0=f2;
n=n+1;
end
f=ones(n,1);
for i=2:n
f(i+1)=f(i)+f(i-1);
end
k=1;
t1=a0+f(n-2)/f(n)*(b0-a0);
t2=a0+f(n-1)/f(n)*(b0-a0);
while k<n-1
% func4为自定义函数,即目标函数
f1=double(subs(s,symvar(s),t1));
f2=double(subs(s,symvar(s),t2));
if f1<f2
b0=t2;
t2=t1;
t1=b0+f(n-1-k)/f(n-k)*(a0-b0);
else
a0=t1;
t1=t2;
t2=a0+f(n-1-k)/f(n-k)*(b0-a0);
end
k=k+1;
end
t2=(a0+b0)/2;
t1=a0+(1/2+1E-4)*(b0-a0);
f1=double(subs(s,symvar(s),t1));
f2=double(subs(s,symvar(s),t2));
if f1<f2
x=t1;
a=a0;
b=t1;
else
x=t2;
a=t2;
b=b0;
end
min_x=(a+b)/2;
min_s=double(subs(s,symvar(s),min_x));
end
牛顿法
将目标函数在点
处泰勒展开:
假设目标函数在点
处取极大值或极小值,则其一阶导数为0:
推导可得:
牛顿法的代码示例如下,仅供参考:
function [x,minf]=nwfun(f,x0,accuracy)
% 牛顿法:求初始点附近的极值点
% 将目标函数二阶泰勒展开,并取其在某点处微分=0,依次求极值
% 得:x1=x0-inv(Hesse Matrix)*一阶偏导
% 目标函数f(符号表达式)
% 初始点x0(列向量)
% 精度accuracy
% 目标函数取最小值时的自变量值x
% 目标函数的最小值min_f
if nargin<3
accuracy=1E-6;
end
InVar=symvar(f);% 获取自变量Independent Variable
% D1f=zeros(length(InVar),1);
for i=1:length(InVar)
D1f(i,1)=diff(f,InVar(i));
end
% D2f=zeros(length(InVar),length(InVar));
for i=1:length(InVar)
for j=1:length(InVar)
D2f(i,j)=diff(D1f(i),InVar(j));
end
end
x=x0;
n=0;
while n==0 || norm(g1)>accuracy
g1=zeros(length(D1f),1);
for i=1:length(D1f)
k=find(InVar==symvar(D1f(i)));
g1(i,1)=double(subs(D1f(i),symvar(D1f(i)),x(k)'));
end
g2=zeros(size(D2f));
for i=1:length(D1f)
for j=1:length(D1f)
k=find(InVar==symvar(D2f(i,j)));
g2=double(subs(D2f(i,j),symvar(D2f(i,j)),x(k)'));
end
end
p=-inv(g2)*g1;
x=x+p;
n=n+1;
if n>10000
disp('已循环10000次,未找到结果,请降低精度')
break
end
end
x=x-p;
minf=double(subs(f,symvar(f),x'));
end
割线法
割线法的基本思想与牛顿法一致,但避免了牛顿法求导求逆等过程,加快了寻优效率。其迭代公式如下:
割线法的代码示例如下,仅供参考:
function [x,min_f]=minGX(f,x0,x1,accuracy)
% 割线法:适用于一元多阶函数;求初始点附近的极值点;
% 目标函数f(符号表达式)
% 初始点x0,x1
% 精度accuracy
% 目标函数取最小值时的自变量x
% 目标函数的最小值min_f
if nargin==3
accuracy=1E-6;
end
d1f=diff(f);
k=0;
tol=1;
while tol>accuracy
d1fx1=double(subs(d1f,symvar(d1f),x1));
d1fx0=double(subs(d1f,symvar(d1f),x0));
x2=x1-(x1-x0)*d1fx1/(d1fx1-d1fx0);
k=k+1;
tol=abs(d1fx1);
x0=x1;
x1=x2;
end
x=x2;
min_f=double(subs(f,symvar(f),x));
end
一维最优化之Matlab实现方法:fminbnd
有关Matlab命令fminbnd函数的调用格式如下:(详情见mathwork官网的介绍)
x=fminbnd(fun,x1,x2):返回目标函数fun在区间[x1,x2]上的极小值;
x=fminbnd(fun,x1,x2,options):options为优化参数选项,可通过optimset设置;
| options | 说明 |
| Display |
off:不显示输出; iter:显示每一次迭代信息; final:显示最终结果; |
| MaxFunEvals | 函数评价所允许的最大次数 |
| MaxIter | 函数所允许的最大迭代次数 |
| TolX | x的容忍度 |
[x,fval]=fminbnd(……):x为返回的最小值,fval为目标函数最小值;
[x,fval,exitflag]=fminbnd(……):exitflag为终止迭代条件,其取值说明如下:
| exitflag | 说明 |
| 1 | 表示函数收敛到解x |
| 0 | 表示达到了函数最大评价次数或迭代的最大次数 |
| -1 | 表示函数不收敛解x |
| -2 | 表示输入的区间有误,即x1>x2 |
[x,fval,evitflag,output]=fminbnd(……):output为最优化输出信息,格式为结构体,其取值及说明如下表所示:
| output | 说明 |
| iterations | 表示算法的跌代次数 |
| funccount | 表示函数赋值的次数 |
| algorithm | 表示求解线性规划问题所用算法 |
| message | 表示算法终止的信息 |
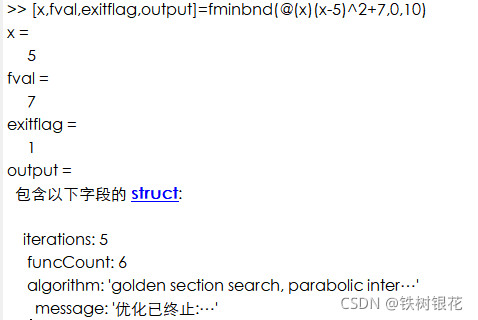
Example 01:
求解如下最优化问题:
根据需要建立Matlab命令流,如下:
[x,fval,exitflag,output]=fminbnd(@(x)(x-5)^2+7,0,10)
结果显示如下:

















 1931
1931

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









