




 本文以隐极永磁同步电机为例,详细介绍伺服驱动电流环的设计步骤。通过将电机状态方程转换为一阶惯性环节,并采用PI控制器进行校正,实现电流快速响应。以西门子1FT6电机为实例,计算出电流环控制器参数。
本文以隐极永磁同步电机为例,详细介绍伺服驱动电流环的设计步骤。通过将电机状态方程转换为一阶惯性环节,并采用PI控制器进行校正,实现电流快速响应。以西门子1FT6电机为实例,计算出电流环控制器参数。
一句话:电流环是一个简单的一阶惯性环节,内部的PID参数可以通过电机的电感等参数获得,这是推导过程:
一般伺服驱动器都具备位置、速度、和电流控制,框图如下图所示:
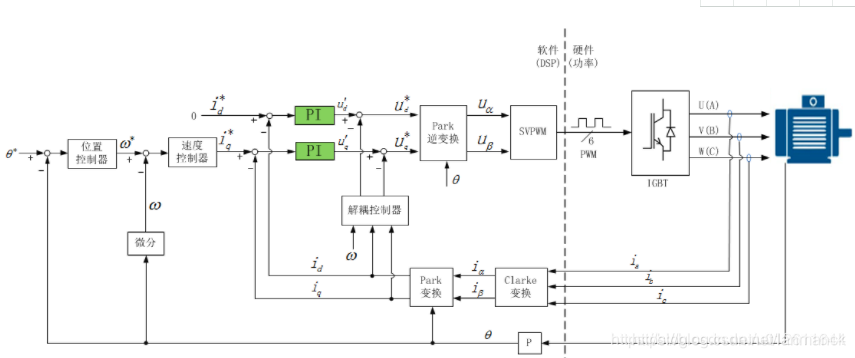
伺服驱动的电流环通常采用矢量控制方法,在很多电机控制书籍中都有很详细的介绍,本文结合具体实例,简单介绍其设计步骤。
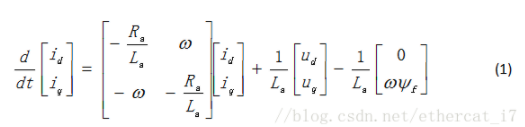
一、电机状态方程
以隐极永磁同步电机为例,其交直轴电感相等,其等效的状态方程为:
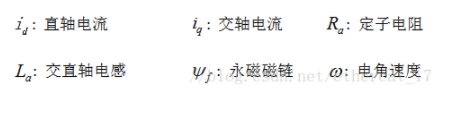
其中,
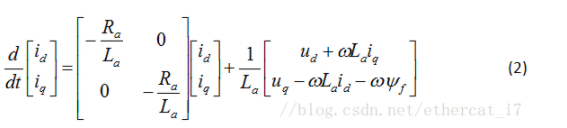
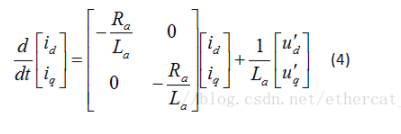
将右边第一个矩阵变换成对角矩阵:
定义中间控制变量:
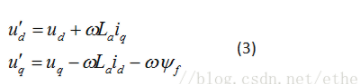
则(1)式可重新写成如下的状态方程:
二、控制器设计
从(4)可以看出,电压到电流的关系为典型的一阶惯性关节,采用PI控制器对其进行校正,如下图所示:
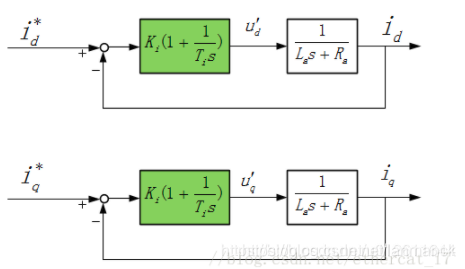
假设d轴和q轴采用相同的控制参数,电流环的开环传递函数为:

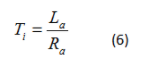
为使控制回路尽可能简单,我们采用零极点对消的方式选取电流环的积分时间常数:
则开环传递函数为:
闭环传递函数为:
从(8)式可以看出,电流环是一个简单的一阶惯性环节,其静态偏差为0,电流响应快慢可通过Ki调节。
电流环的bode图如下:
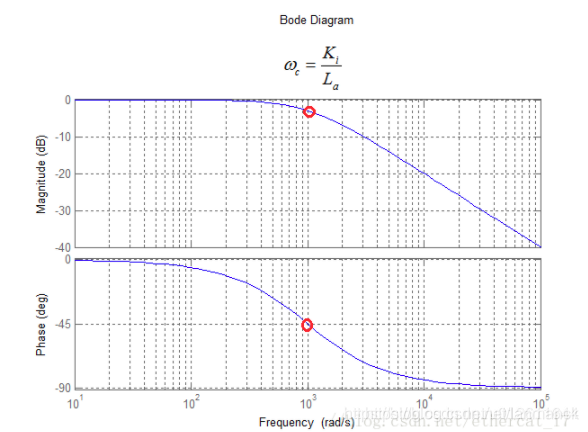
其中,电流环的截止频率:
若截止频率选定,则可确定电流环的比例系数:
三、设计实例
以西门子1FT6电机为例,从数据手册可以查询到定子电阻、电感和永磁磁链等相关数据:
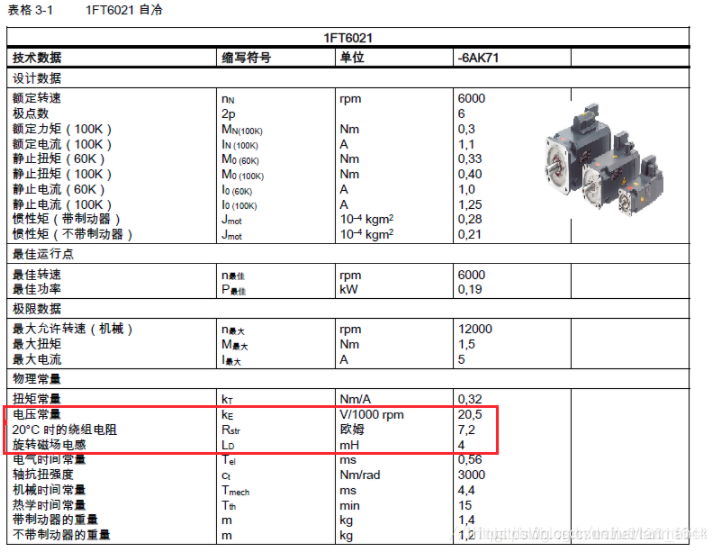
已知La=4mH, Ra=7.2欧姆,根据(6)式可计算出电流环控制器的积分时间常数:
若选取电流环截止频率为500rad/s,则根据(10)式可计算出电流环控制器的比例系数为:

另外,可根据电压常量和式(3)设计出解耦控制器。
当然,以上计算都是基于理论值,实际上电阻会随温度变化而变化,不同电流下的电感值也不一样,理论计算值需要根据实际情况进行动态调整。

















 274
274

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









