






目录
泰勒展开
参考文献:
【1】https://www.zhihu.com/question/25627482
泰勒展开:用多项式函数,在某一个点附近,逼近原函数。
原因:因为多项式函数求导等运算比较方便,有良好的性质
下图是一个例子,不断用多项式去逼近
e
x
,
x
=
2
e^x,x=2
ex,x=2.

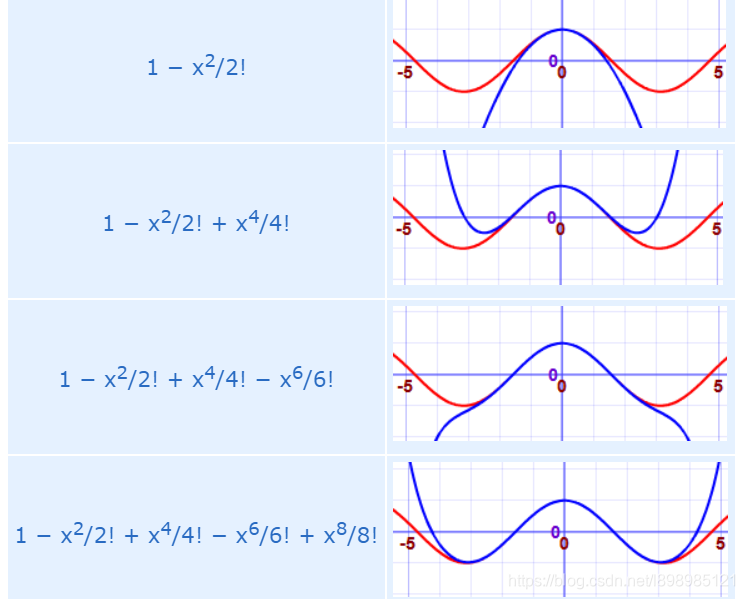
所以最初的想法可能就是仿造一条简单一点的曲线,让在一个点处的各种导数都相同就行
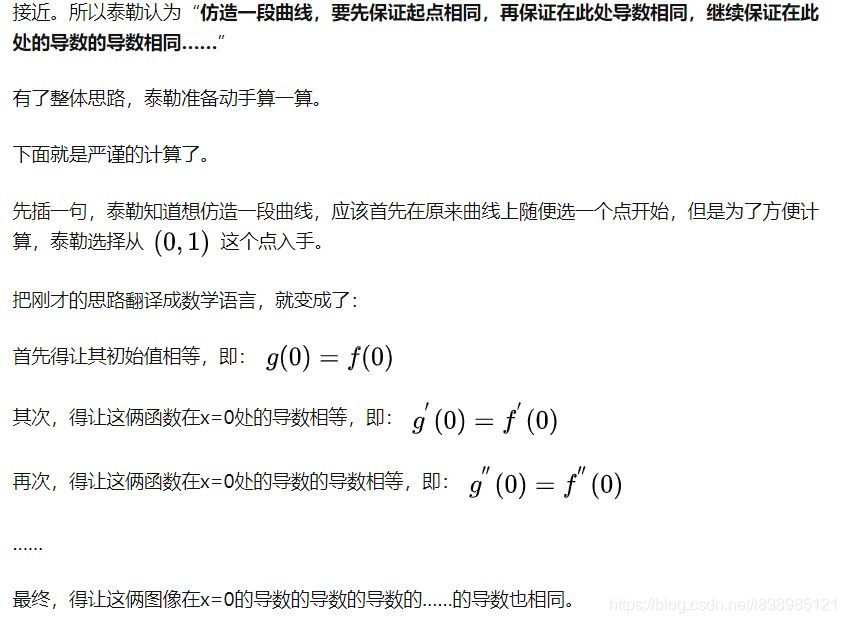
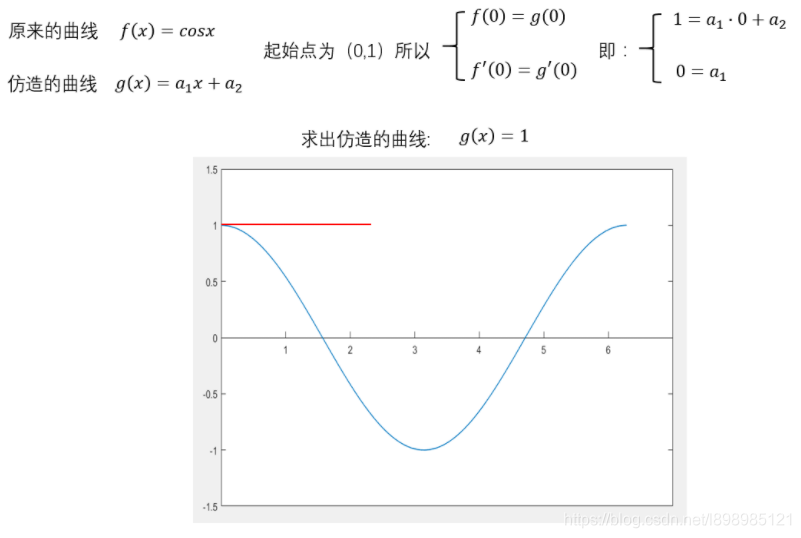
先是普通的相等
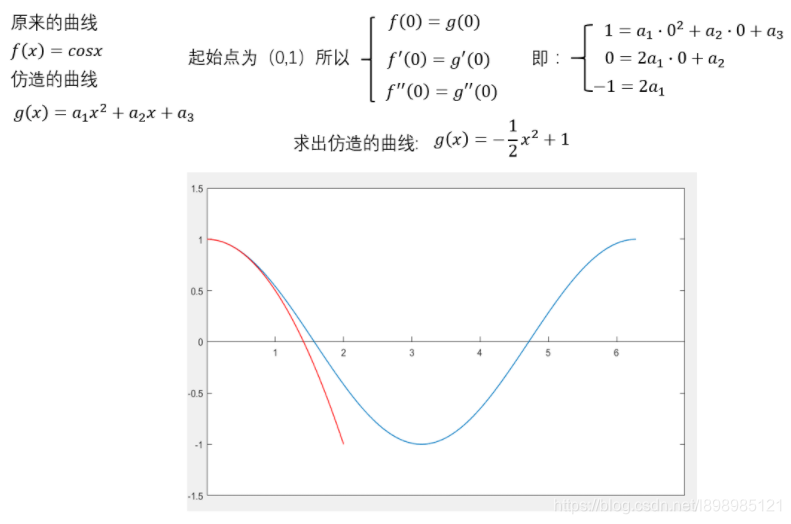
然后逐渐复杂
最复杂
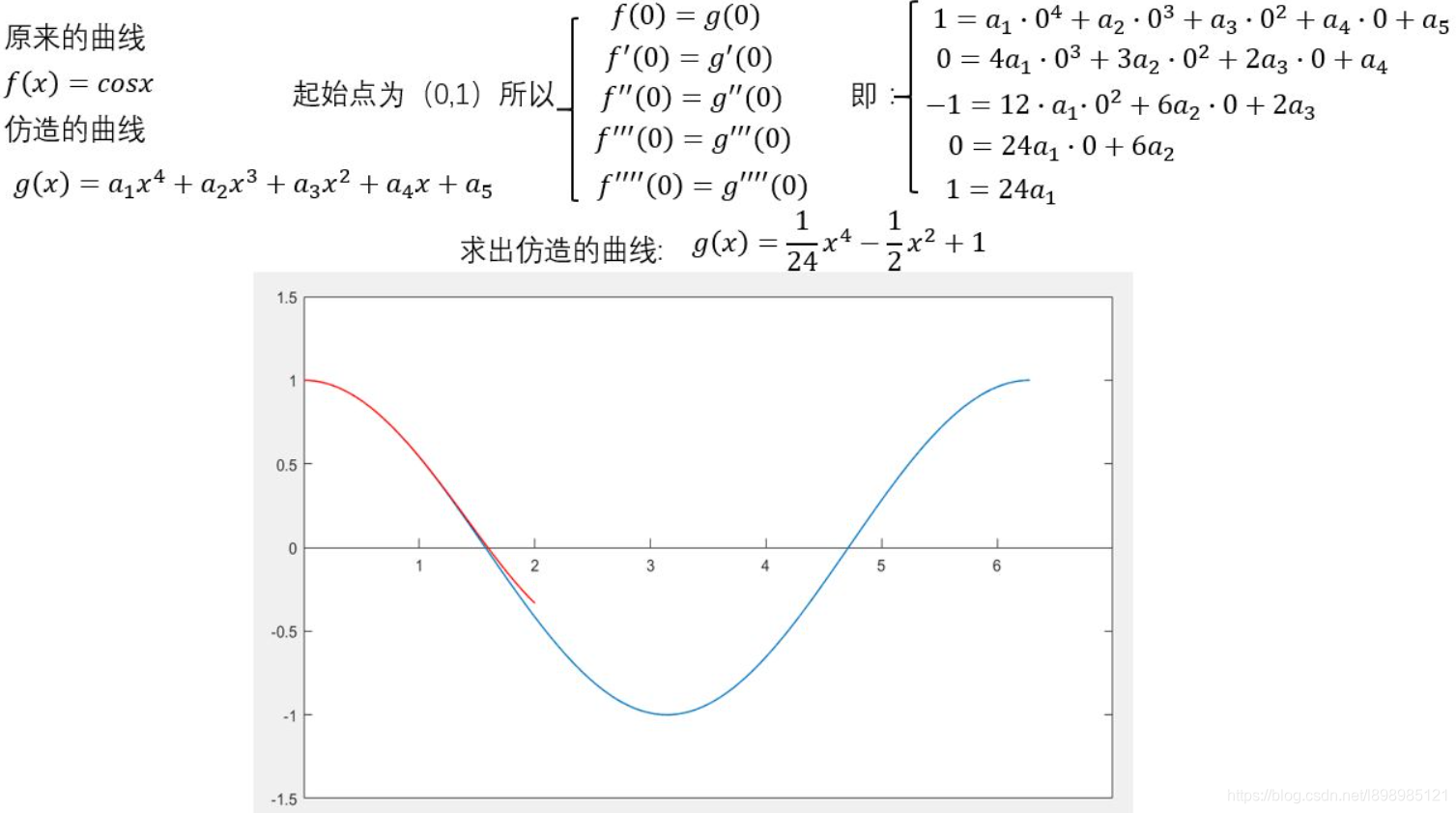
最后得到式子:

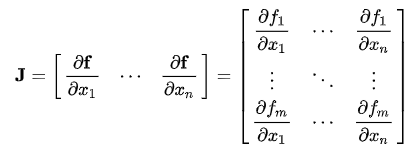
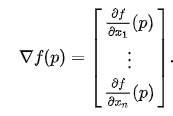
雅阁比矩阵
一个N到M维的映射:

有矩阵:
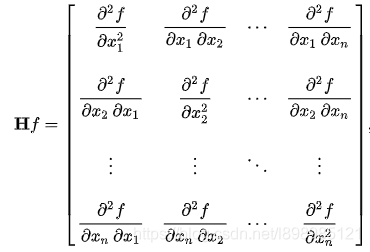
海塞矩阵
感觉中文的wiki比英文的wiki写的还好一些
参考资料:
【1】https://zh.wikipedia.org/wiki/%E9%BB%91%E5%A1%9E%E7%9F%A9%E9%99%A3
对于一个N到1维的映射:

有矩阵:
和泰勒展开雅各比矩阵关系
一元函数泰勒展开:

二元函数泰勒展开


其中:


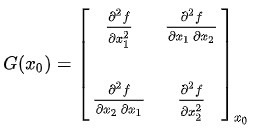
写成矩阵形式:

G
(
x
0
)
G(x_0)
G(x0)为在
x
0
x_0
x0点的海塞矩阵:
由于:
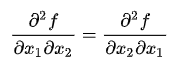
所以海塞矩阵为对称阵
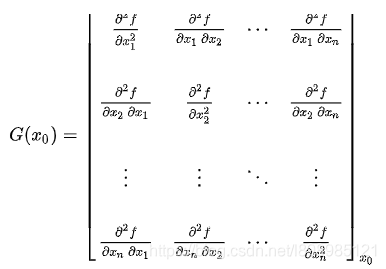
推广到多元函数有:

其中:

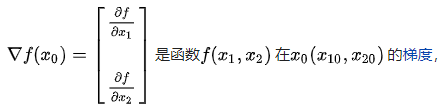
可以看到,一个函数在点
x
0
x_0
x0处的海塞矩阵就是在该点梯度的雅各比矩阵:
应用
经常用在优化当中,将一个目标函数进行泰勒展开:

牛顿法(newton’s method)
求根
如下图是迭代求根过程
首先取曲线上一个点,构造一条切线:

令切线的y=0:

求出x:
求极值
求如下极值:

泰勒展开:

导数等于0:

得到:
更新:
求极值的高维情况:
对于一个多元函数f,f是一个标量,有:
如下图:左图可以想象成:
f
(
x
,
y
)
=
x
2
+
y
2
f(x,y)=x^2+y^2
f(x,y)=x2+y2
右图
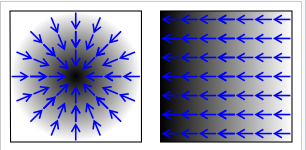
高维迭代过程可以类比一元函数的情况:
拟牛顿法
从上面的牛顿法更新权重的方式看,需要求海塞矩阵的逆,这个计算比较耗时,有时候可能也有问题,因此,需要替换掉海塞矩阵,用一个矩阵去近似。
高斯牛顿法
参考资料:
【1】https://math.stackexchange.com/questions/1105214/difference-between-newtons-method-and-gauss-newton-method
【2】https://blog.youkuaiyun.com/jinshengtao/article/details/51615162
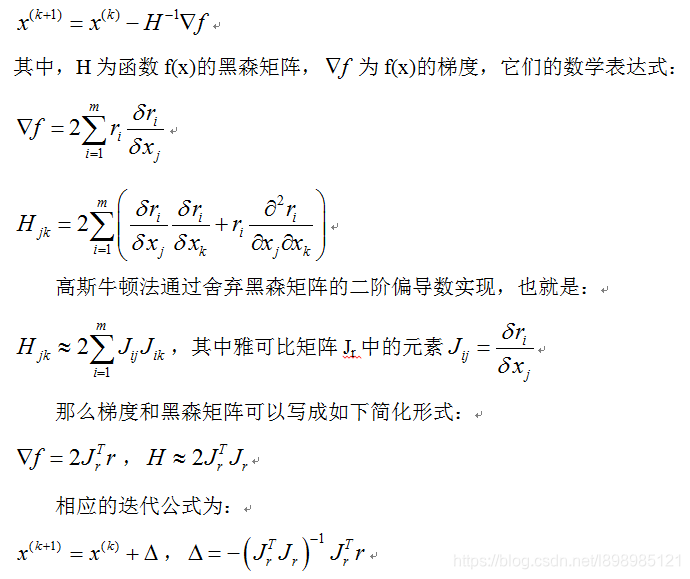
在求解最小二乘形式的问题中,可以用一种更简洁的方法来替换海塞矩阵。
比如要计算如下目标函数的最小值:

其中
e
(
x
)
e(x)
e(x)是误差函数,
e
(
x
)
∈
R
m
,
x
∈
R
n
e(x)\in R^m,x\in R^n
e(x)∈Rm,x∈Rn,
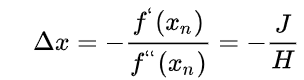
按照之前的,将f(x)泰勒展开,保留到2次项,然后求导可得:

令导数等于零:

这个就是牛顿法的更新,需要求H的逆。
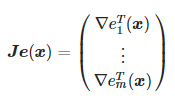
由于上面提到的,海塞矩阵是梯度的雅各比矩阵,因此有:
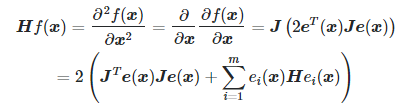
其中:
忽略
H
e
(
x
)
He(x)
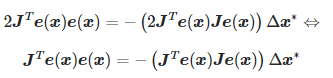
He(x)那一项,可得:
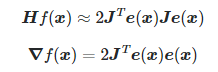
进而得到高斯牛顿法的更新方式 :
下面这个资料里的描述也是类似的

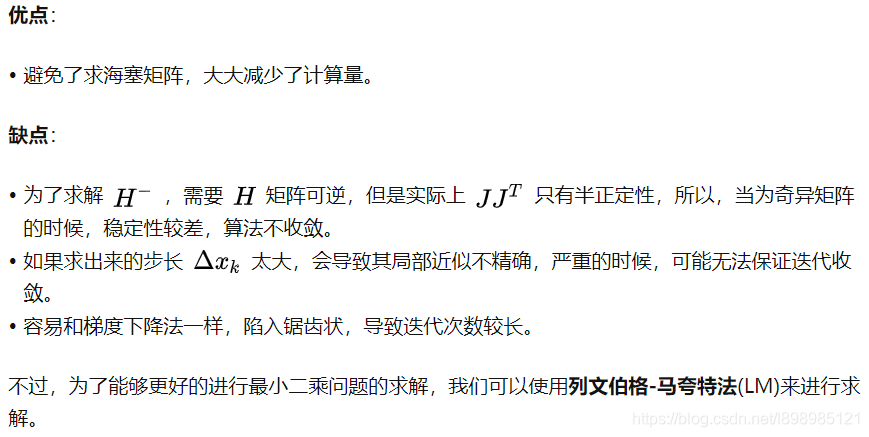
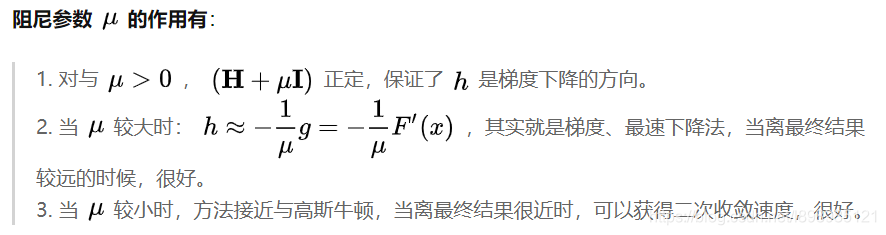
列文伯格-马夸特法(LM法)
参考资料:
【1】https://zhuanlan.zhihu.com/p/42415718
【2】https://blog.youkuaiyun.com/boksic/article/details/79177055
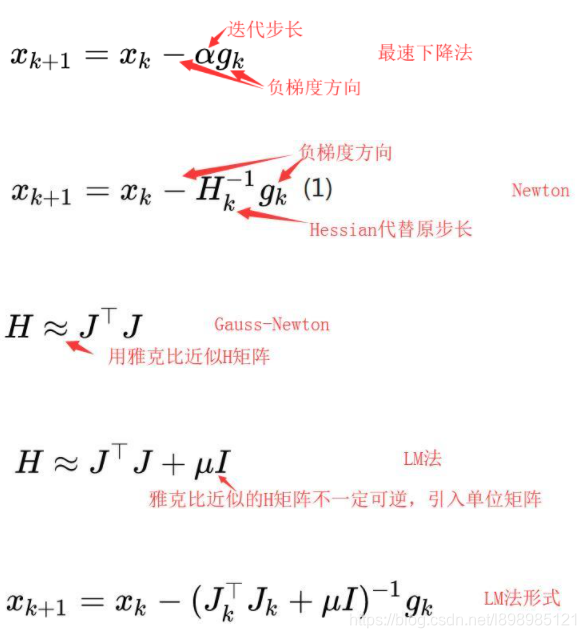
牛顿法,梯度下降,牛顿高斯,LM方法区别和联系
参考资料:
【1】https://blog.youkuaiyun.com/a6333230/article/details/83304098
共轭梯度下降(condugate gradient descent)
这一部分发现一个文章,可能挺有用:
http://www.cs.cmu.edu/~quake-papers/painless-conjugate-gradient.pdf


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









