



1.按键开关又名轻触开关
是指利用按钮推动传动机构,使动触点与静触点按通或断开并实现电路换接的开关。
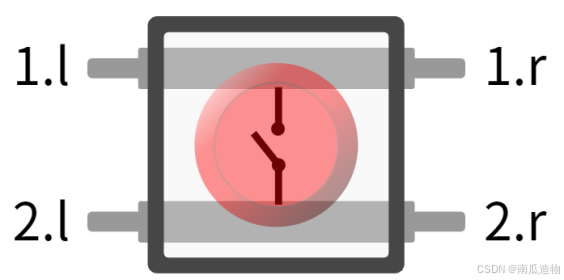
2.原理图图标示意

3.引脚状态
按键未按下时:1.l 与1.r接通; 2.l与2.r接通; 1号引脚与2号引脚断开;
当按下按键,按键的四个引脚都接通
4.按键抖动
当按下物理按钮时,电路会打开和关闭数十次或数百次。这种现象被称为按键抖动。发生这种情况是因为按钮的机械性质:金属触点结合在一起时,有一段短暂的过度时间——触点的接触不充分,这导致一系列快速的开放/关闭。
所以在有轻触开关按键的程序中,须要去除抖动;
5.按键去抖示例
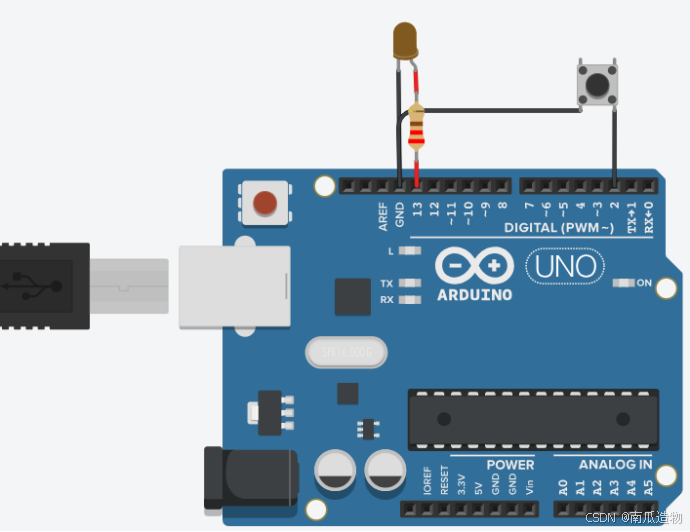
物料:
1PCS 220欧姆电阻
1PCS LED灯
1PCD 轻触开关
1PCS UNO开发板
接线图:
代码示例:
const int buttonPin = 2; // 定义按键连接的引脚为数字引脚2
const int ledPin = 13; // 定义LED连接的引脚为数字引脚13(通常用于板上LED)
bool ledState = false; // 当前LED的状态,初始为false(OFF)
int buttonState; // 用于存储当前按键读取的状态
int lastButtonState = HIGH; // 用于存储上一次按键读取的状态,初始为HIGH(未按下)
unsigned long lastDebounceTime = 0; // 用于存储上一次防抖计时器的时间
unsigned long debounceDelay = 100; // 防抖延迟时间设置为100毫秒
void setup() {
pinMode(buttonPin, INPUT_PULLUP); // 设置按键引脚为输入并启用内部上拉电阻
pinMode(ledPin, OUTPUT); // 设置LED引脚为输出模式
digitalWrite(ledPin, ledState); // 设置LED初始状态为关闭
Serial.begin(9600); // 初始化串行通信,波特率为9600
}
void loop() {
int reading = digitalRead(buttonPin); // 读取当前按键状态
// 如果按键状态有变化,则重置防抖计时器
if (reading != buttonState) {
lastDebounceTime = millis(); // 记录当前时间
buttonState = reading; // 更新按钮状态
// 打印当前时间到串行监视器
Serial.println(millis());
// 如果当前时间小于防抖延迟加上上一次防抖时间,则进入等待
if(millis() < debounceDelay + lastDebounceTime){
// 等待直到按键被释放
while(!digitalRead(buttonPin));
// 如果按键在按下后变为未按下(HIGH)
if(reading == HIGH){
ledState = !ledState; // 切换LED状态
digitalWrite(ledPin, ledState); // 更新LED引脚状态
// 打印LED状态到串行监视器
Serial.print("led:");
Serial.println(ledState);
}
}
}
// 在循环结束前更新按钮状态
buttonState = reading;
}
代码解析:
控制一个连接在Arduino数字引脚13上的LED灯的开和关状态,基于一个连接在数字引脚2上的按键输入。当按键被按下时,程序会切换LED的状态(开或关),并在串行监视器中打印LED当前的状态。
为了解决按键抖动的问题,程序实现了防抖机制,确保只有在按键状态稳定后才进行LED状态的切换。通过启用内部上拉电阻,按键未按下时引脚处于高电平(HIGH),按键被按下时引脚变为低电平(LOW)。程序在主循环中不断检查按键状态,当检测到状态变化时启动防抖逻辑,确保LED在按键按下后能可靠地切换状态
关注tao&bao店铺:南瓜造物,为您解锁更多好物

















 1797
1797

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









