







前期内容回顾
./kalibr_create_target_pdf --type 'apriltag' --nx 6 --ny 6 --tsize 0.022 --tspace 0.3
大家还记得这一行代码吗?会生成一个标定所需的pdf。大家去打印的时候A4缩放40%。文件我已上传,所需的友友们自行下载。
好啦,我们先进入正文。
cd kalibr_ws
gedit april_6x6_A4.yaml我们将以下代码放在april_6x6_A4.yaml中,内容展示如下,后续我们标定的时候需要使用
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.022 #size of apriltag, edge to edge [m] 要亲自拿尺子量一下
tagSpacing: 0.3 #ratio of space between tags to tagSize关闭相机的结构光
方法一:
首先启动
roslaunch realsense2_camera rs_camera.launch
新开终端后运行
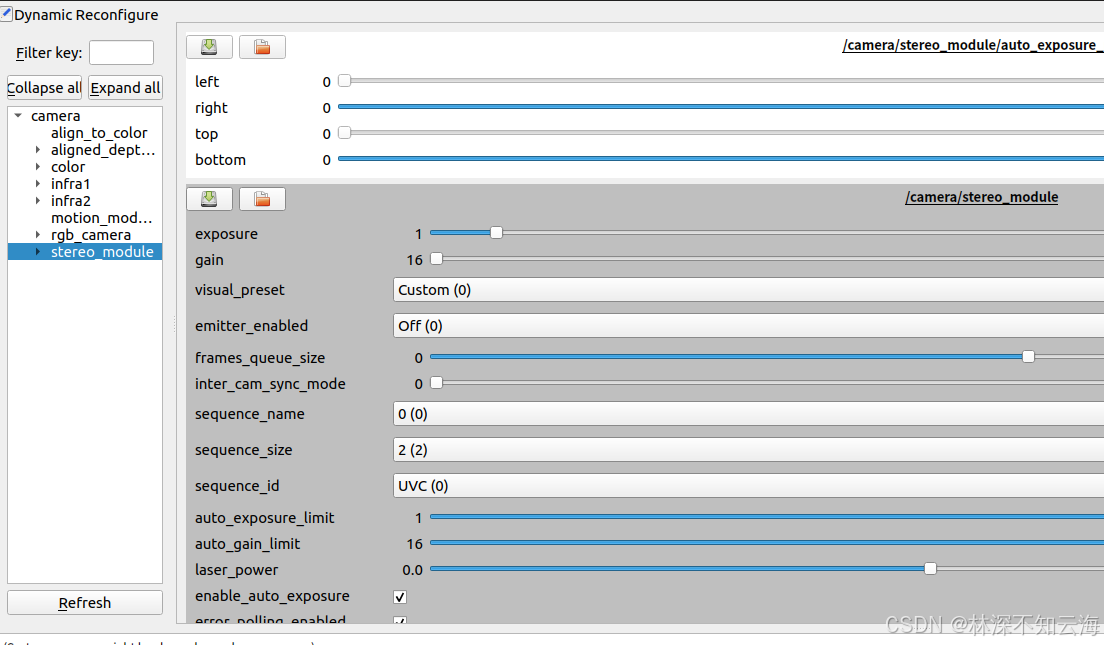
rosrun rqt_reconfigure rqt_reconfigure打开后将camera->stereo_module中的emitter_enabled设置为off(0) ,如下图所示:
方法二:
最简单粗暴地方法就是用电工胶布把红外摄像头给遮住,如图所示:

标定步骤
第一步,设置rviz
roslaunch realsense2_camera rs_camera_vins.launch
rviz打开rviz之后,注意一定要先在左侧 Fixed Frame 选择camera_link。左下角 add --> By topic --> /camera/color/image_raw/ --> 双击Camera ,找一个适合的能拍到棋盘格的距离。用同样的方式添加双目topic,/camera/infra1/image_rect_raw、/camera/infra2/image_rect_raw。
如果大家打开后没有双目的话题,就把以下代码粘贴到rs_camera_vins.launch 中
<launch>
<arg name="serial_no" default=""/>
<arg name="usb_port_id" default=""/>
<arg name="device_type" default=""/>
<arg name="json_file_path" default=""/>
<arg name="camera" default="camera"/>
<arg name="tf_prefix" default="$(arg camera)"/>
<arg name="external_manager" default="false"/>
<arg name="manager" default="realsense2_camera_manager"/>
<arg name="fisheye_width" default="640"/>
<arg name="fisheye_height" default="480"/>
<arg name="enable_fisheye" default="false"/>
<arg name="depth_width" default="640"/>
<arg name="depth_height" default="480"/>
<arg name="enable_depth" default="false"/>
<arg name="infra_width" default="640"/>
<arg name="infra_height" default="480"/>
<arg name="enable_infra1" default="true"/>
<arg name="enable_infra2" default="true"/>
<arg name="color_width" default="640"/>
<arg name="color_height" default="480"/>
<arg name="enable_color" default="true"/>
<arg name="fisheye_fps" default="30"/>
<arg name="depth_fps" default="30"/>
<arg name="infra_fps" default="30"/>
<arg name="color_fps" default="30"/>
<arg name="gyro_fps" default="200"/>
<arg name="accel_fps" default="250"/>
<arg name="enable_gyro" default="true"/>
<arg name="enable_accel" default="true"/>
<arg name="enable_pointcloud" default="false"/>
<arg name="pointcloud_texture_stream" default="RS2_STREAM_COLOR"/>
<arg name="pointcloud_texture_index" default="0"/>
<arg name="enable_sync" default="true"/>
<arg name="align_depth" default="true"/>
<arg name="publish_tf" default="true"/>
<arg name="tf_publish_rate" default="0"/>
<arg name="filters" default=""/>
<arg name="clip_distance" default="-2"/>
<arg name="linear_accel_cov" default="0.01"/>
<arg name="initial_reset" default="false"/>
<arg name="unite_imu_method" default="linear_interpolation"/>
<arg name="topic_odom_in" default="odom_in"/>
<arg name="calib_odom_file" default=""/>
<arg name="publish_odom_tf" default="true"/>
<arg name="allow_no_texture_points" default="false"/>
<arg name="emitter_enable" default="false"/>
<group ns="$(arg camera)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="tf_prefix" value="$(arg tf_prefix)"/>
<arg name="external_manager" value="$(arg external_manager)"/>
<arg name="manager" value="$(arg manager)"/>
<arg name="serial_no" value="$(arg serial_no)"/>
<arg name="usb_port_id" value="$(arg usb_port_id)"/>
<arg name="device_type" value="$(arg device_type)"/>
<arg name="json_file_path" value="$(arg json_file_path)"/>
<arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/>
<arg name="pointcloud_texture_stream" value="$(arg pointcloud_texture_stream)"/>
<arg name="pointcloud_texture_index" value="$(arg pointcloud_texture_index)"/>
<arg name="enable_sync" value="$(arg enable_sync)"/>
<arg name="align_depth" value="$(arg align_depth)"/>
<arg name="fisheye_width" value="$(arg fisheye_width)"/>
<arg name="fisheye_height" value="$(arg fisheye_height)"/>
<arg name="enable_fisheye" value="$(arg enable_fisheye)"/>
<arg name="depth_width" value="$(arg depth_width)"/>
<arg name="depth_height" value="$(arg depth_height)"/>
<arg name="enable_depth" value="$(arg enable_depth)"/>
<arg name="color_width" value="$(arg color_width)"/>
<arg name="color_height" value="$(arg color_height)"/>
<arg name="enable_color" value="$(arg enable_color)"/>
<arg name="infra_width" value="$(arg infra_width)"/>
<arg name="infra_height" value="$(arg infra_height)"/>
<arg name="enable_infra1" value="$(arg enable_infra1)"/>
<arg name="enable_infra2" value="$(arg enable_infra2)"/>
<arg name="fisheye_fps" value="$(arg fisheye_fps)"/>
<arg name="depth_fps" value="$(arg depth_fps)"/>
<arg name="infra_fps" value="$(arg infra_fps)"/>
<arg name="color_fps" value="$(arg color_fps)"/>
<arg name="gyro_fps" value="$(arg gyro_fps)"/>
<arg name="accel_fps" value="$(arg accel_fps)"/>
<arg name="enable_gyro" value="$(arg enable_gyro)"/>
<arg name="enable_accel" value="$(arg enable_accel)"/>
<arg name="publish_tf" value="$(arg publish_tf)"/>
<arg name="tf_publish_rate" value="$(arg tf_publish_rate)"/>
<arg name="filters" value="$(arg filters)"/>
<arg name="clip_distance" value="$(arg clip_distance)"/>
<arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
<arg name="unite_imu_method" value="$(arg unite_imu_method)"/>
<arg name="topic_odom_in" value="$(arg topic_odom_in)"/>
<arg name="calib_odom_file" value="$(arg calib_odom_file)"/>
<arg name="publish_odom_tf" value="$(arg publish_odom_tf)"/>
<arg name="allow_no_texture_points" value="$(arg allow_no_texture_points)"/>
</include>
</group>
</launch>
第二步,修改相机帧数
kalibr在处理标定数据的时候要求频率不能太高,一般为4Hz,我们可以使用如下命令来更改topic的频率,实际上是将原来的topic以新的频率转成新的topic,实际测试infra1对应左目相机,infra2对应右目相机。
rosrun topic_tools throttle messages /camera/color/image_raw 4.0 /color & rosrun topic_tools throttle messages /camera/infra1/image_rect_raw 4.0 /infra_left & rosrun topic_tools throttle messages /camera/infra2/image_rect_raw 4.0 /infra_right第三步,录制ROS数据包
cd kablbr_ws
rosbag record -O multicameras_calibration /infra_left /infra_right /color录制包的时候有以下注意事项:盯着rviz里面的画面,确保RGB、左目、右目都能看到完整的棋盘格;录制时三个摄像头都要完整的看到标定板,一定要慢,慢慢晃动
步骤如下:
(1)俯仰角摆动3次
(2)偏航角摆动3次
(3)翻滚角摆动3次
(4)上下移动3次
(5)左右移动3次
(6)前后移动3次
(7)自由移动,摆动幅度大一些,但要移动缓慢些,使得标定目标尽可能出现在相机的所有视野范围内。整体标定时间在90s以上
第四步,使用Kalibr标定
rosrun kalibr kalibr_calibrate_cameras --target april_6x6_A4.yaml --bag multicameras_calibration.bag --models pinhole-equi pinhole-equi pinhole-equi --topics /infra_left /infra_right /color --bag-from-to 10 100 --show-extraction
博主在运行这一步的时候报错了,说缺少"wx"这个库,需要安装 wxPython 库才能解决这个问题,大家可以输入下面的代码安装
sudo apt-get install python3-wxgtk4.0标定完成会生成三个文件,如图所示:
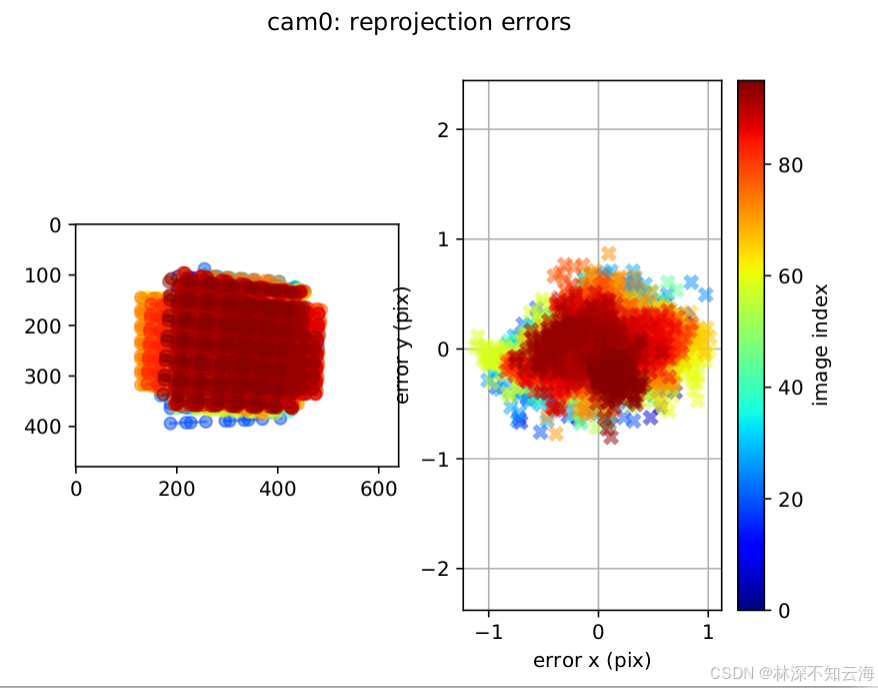
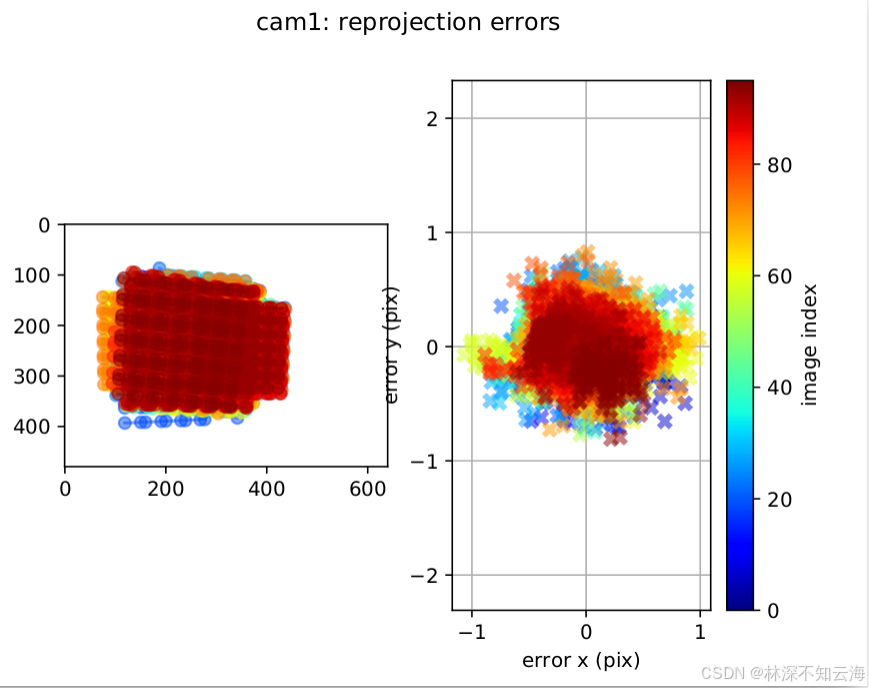
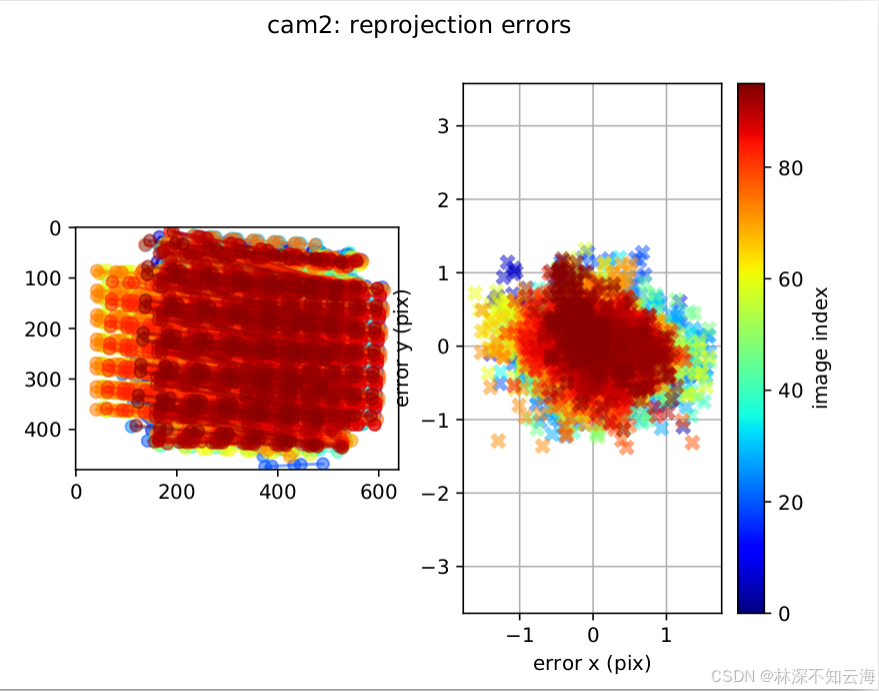
我们打开其中的multicameras_calibration-report-cam.pdf文件,翻到最后面。查看results-cam-homeubuntumulticameras_calibration_biaoding.txt中的重投影误差reprojection error数值是多少,理想范围是0.1-0.2。
友友们如果标定出来的数据太发散的话就将bag删除附带三个生成的文件,重新录制数据包(参考步骤三),晃动标定板的速度不要太快,慢慢的晃。博主标定出来的数据还是可以的,大家可以参考一下:

















 2052
2052

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









