




 本文讨论了自动驾驶场景下两种主流Camera方案:GMSL1和GMSL2,并详细介绍了各自的链路框架、模组信息、I2C地址配置、pipeline说明及PWM触发帧同步等内容。
本文讨论了自动驾驶场景下两种主流Camera方案:GMSL1和GMSL2,并详细介绍了各自的链路框架、模组信息、I2C地址配置、pipeline说明及PWM触发帧同步等内容。
概述:本文重点讨论自动驾驶中camera主流方案,主控soc上mipi_csi2搭配max96712的camera完整链路软件框架和实现方案,主要讨论了GMSL1和GMSL2两种方案,本文为本人调试过程中记录,如果不对地方欢迎讨论:853906167@qq.com
1.Camera链路完整框架:
1.1 链路框架图:
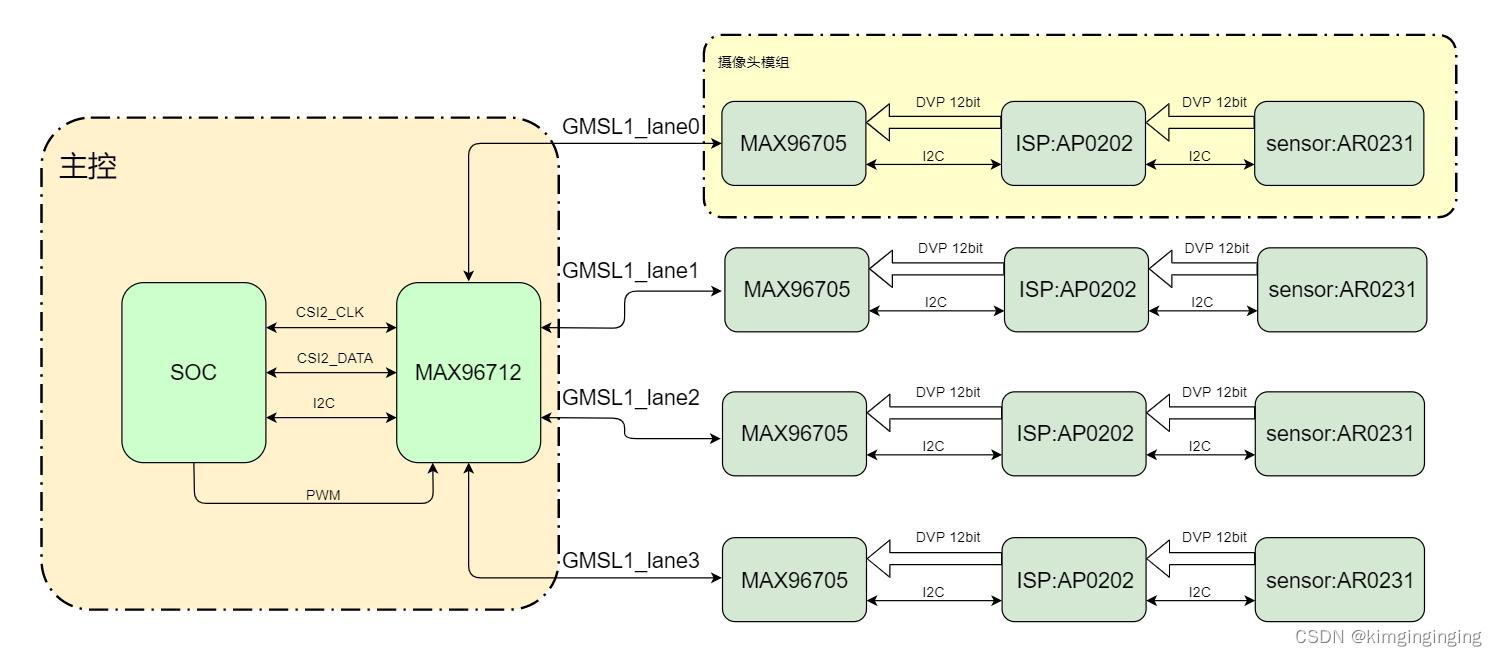
GMSL1方案: 3Gbps
NOTE:
摄像头模组采用森云SG2-AR0231C-0202-GMSL
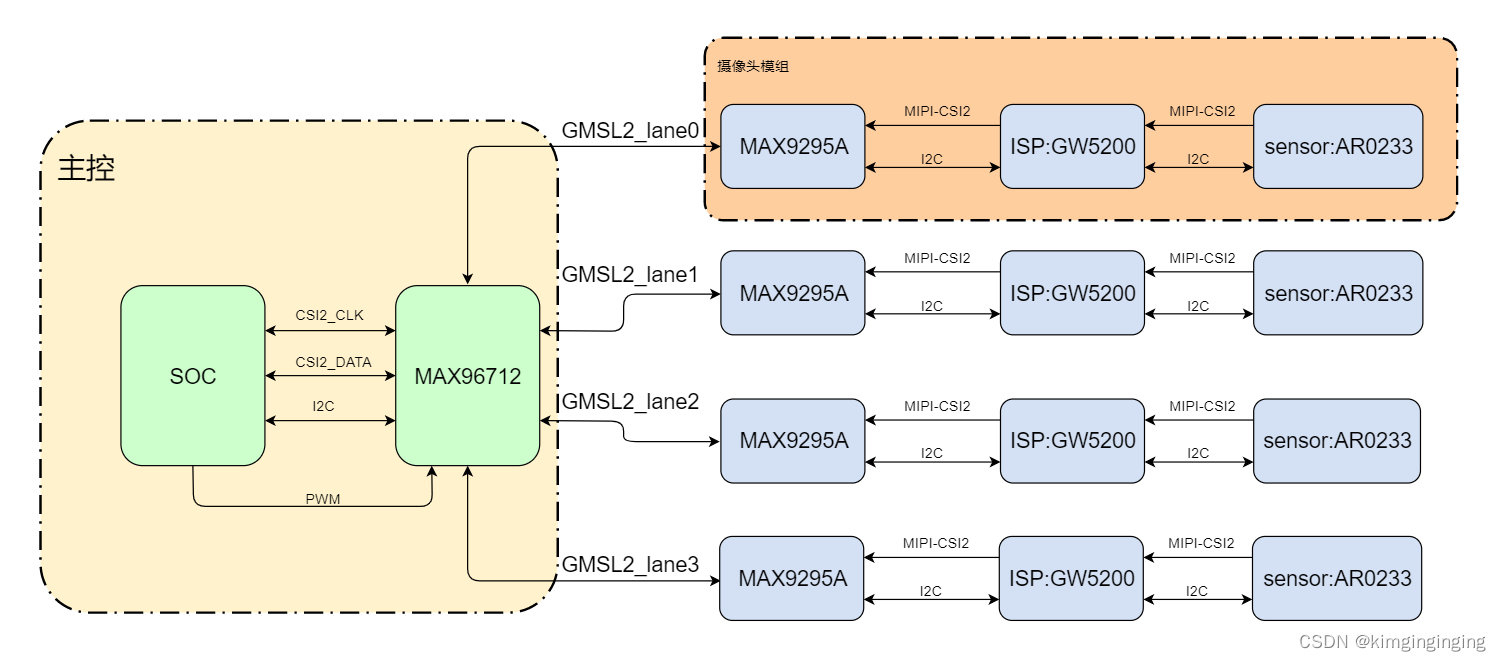
GMSL2方案: 6Gbps
NOTE:
摄像头模组采用森云SG2-AR0233C-5200-GMSL2
1.2 camera模组信息:
SG2-AR0231C-0202-GMSL(GMSL1):
模组框图:
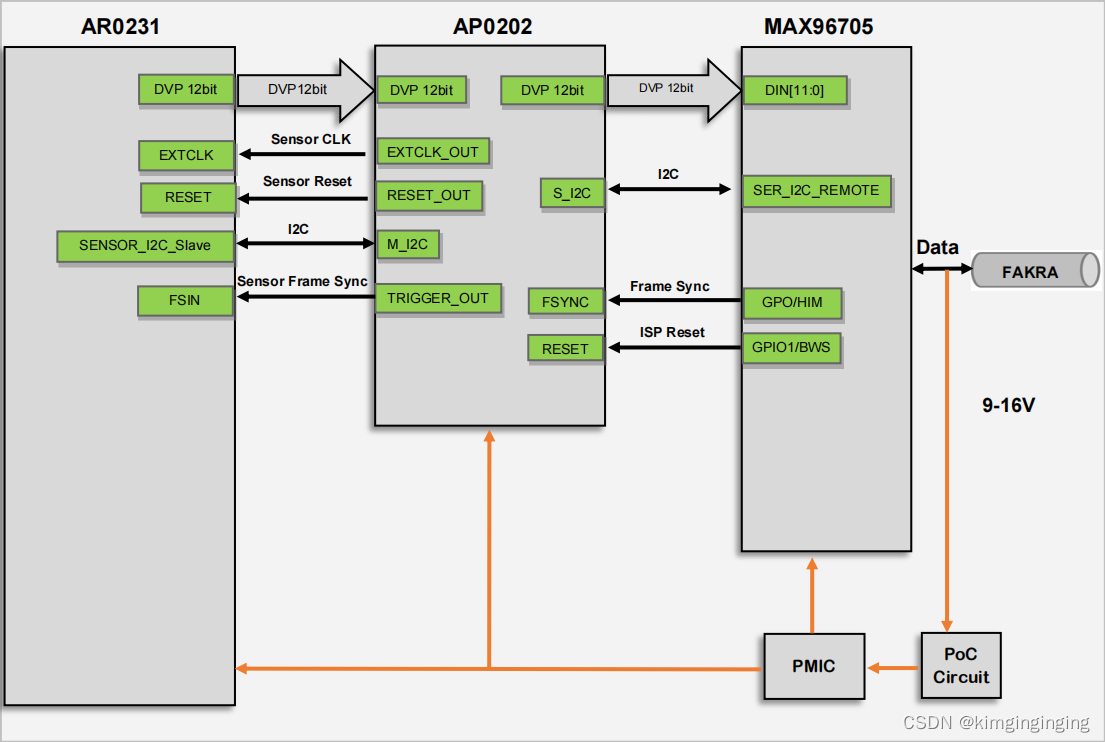
默认地址信息(8bit表示,7bit表示需要自己转换):
MAX96705 : 0x80 转成7bit对应为0x40
AP0202 : 0xBA
AR0231 : 0X20
关键参数:
HDR支持
1920*1080/22fps
YUV422@8bit输出
SG2-AR0233C-5200-GMSL2(GMSL2):
模组框图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1086
1086

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









