







针对落锤仪器化冲击系统的电子控制器设计及核心代码实现方案,涵盖硬件架构、控制逻辑和关键代码模块,采用STM32F407+FPGA双核架构实现高速数据采集与实时控制。
电子控制器硬件设计
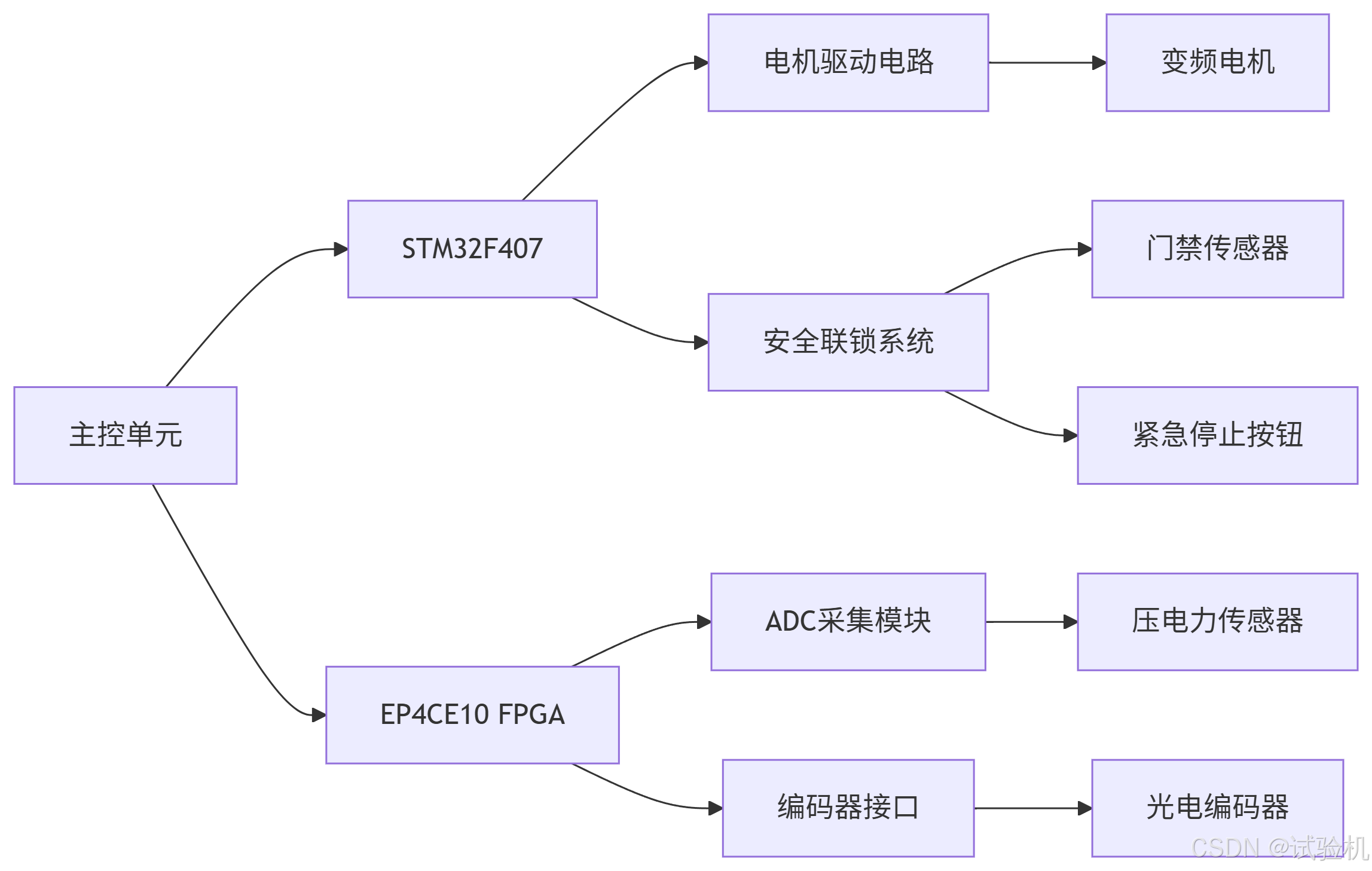
核心硬件配置
| 模块 | 型号/参数 | 功能 |
|---|---|---|
| 主控MCU | STM32F407ZGT6 (168MHz) | 系统调度/通信/安全控制 |
| 协处理器 | Altera EP4CE10F17C8N | 1MHz高速ADC控制 & 编码器解码 |
| ADC芯片 | ADS8588S (16位, 8通道) | 力/加速度传感器信号采集 |
| 电机驱动 | IR2136S+IPM模块 | 三相变频电机矢量控制 |
| 通信接口 | RS485+CAN双总线 | 连接上位机与扩展设备 |
| 安全输入 | 光耦隔离DIx8 | 急停/门禁/限位信号采集 |
控制软件架构
# 系统控制状态机(简化版)
class DropWeightController:
def __init__(self):
self.state = "IDLE"
self.safety_check = SafetySystem()
def run(self):
while True:
if self.state == "IDLE":
if self.safety_check.all_clear() and start_cmd:
self.arm_motor() # 启动电机
self.state = "RISING"
elif self.state == "RISING":
if reach_target_height():
self.brake_motor() # 制动电机
self.enable_hammer_lock() # 锁定锤头
self.state = "READY"
elif self.state == "READY":
if release_cmd:
self.release_hammer() # 释放锤头
self.fpga_start_acq() # 触发FPGA采集
self.state = "IMPACT"
elif self.state == "IMPACT":
if detect_rebound(): # 检测回弹
self.activate_damper() # 启动阻尼器
self.state = "RECOVERY"
elif self.state == "RECOVERY":
if system_stable():
self.transfer_data() # 上传采集数据
self.state = "IDLE"
关键代码模块实现
1. FPGA高速采集控制 (Verilog)
module Impact_Acquisition(
input clk_100MHz, // 主时钟
input trigger, // 冲击触发信号
output reg [15:0] adc_data,
output reg data_valid
);
reg [6:0] sample_count;
reg acquisition_active;
always @(posedge clk_100MHz) begin
// 触发启动采集
if (trigger & !acquisition_active) begin
acquisition_active <= 1'b1;
sample_count <= 0;
end
// 1MHz采样循环
if (acquisition_active) begin
if (sample_count == 99) begin // 100MHz/100=1MHz
adc_data <= ADC_BUS; // 读取ADC数据
data_valid <= 1'b1;
sample_count <= 0;
// 采集10ms后停止 (10000个点)
if (total_samples >= 10000)
acquisition_active <= 1'b0;
end
else begin
sample_count <= sample_count + 1;
data_valid <= 1'b0;
end
end
end
endmodule
2. 安全联锁系统
// 安全状态检测函数
uint8_t CheckSafety(void) {
uint8_t flags = 0;
// 检查防护门状态 (0=关闭)
if(READ_PIN(DOOR_SENSOR))
flags |= 0x01; // 门未关闭
// 检查急停按钮状态 (0=未按下)
if(!READ_PIN(EMERGENCY_STOP))
flags |= 0x02; // 急停触发
// 检查锤头锁定状态
if(!hammer_locked())
flags |= 0x04; // 锤头未锁定
return flags; // 返回0表示安全
}
// 主控安全拦截
void Safety_Interceptor(void) {
if(CheckSafety() != 0) {
Motor_Stop(); // 立即停止电机
Hammer_Lock_Engage(); // 强制锁定锤头
Send_Alert_Msg(CAN_BUS); // 发送报警信息
}
}
3. 能量计算算法 (Python伪代码)
def calculate_energy(F, t, m):
"""
计算吸收能量曲线
:param F: 力值数组 (N)
:param t: 时间数组 (s)
:param m: 锤头质量 (kg)
:return: E_abs 吸收能量数组 (J)
"""
v0 = math.sqrt(2 * 9.8 * h) # 初始速度
v = [v0] # 速度数组
s = [0] # 位移数组
E_abs = [0] # 能量数组
for i in range(1, len(F)):
# 计算速度变化 (dv = F*dt/m)
delta_v = -F[i] * (t[i]-t[i-1]) / m
v.append(v[i-1] + delta_v)
# 计算位移 (ds = v_avg*dt)
s.append(s[i-1] + (v[i]+v[i-1])/2 * (t[i]-t[i-1]))
# 计算吸收能量 (dE = F*ds)
E_abs.append(E_abs[i-1] + F[i] * (s[i]-s[i-1]))
return E_abs
4. 电机闭环控制
// PID位置控制 (高度精确定位)
void Motor_Position_PID(float target_height) {
float Kp=0.8, Ki=0.05, Kd=0.1;
float error, last_error=0, integral=0;
float current_height = Encoder_GetHeight();
while(fabs(target_height - current_height) > 0.1) { // 精度0.1mm
error = target_height - current_height;
integral += error;
float derivative = error - last_error;
// 计算PID输出 (PWM占空比)
float output = Kp*error + Ki*integral + Kd*derivative;
output = constrain(output, -100, 100); // 限制输出范围
// 驱动电机
Motor_Drive(output);
// 更新状态
last_error = error;
current_height = Encoder_GetHeight();
HAL_Delay(1); // 1ms控制周期
}
Motor_Brake(); // 到达目标位置后制动
}
抗干扰设计关键技术
-
信号隔离方案
-
传感器信号:采用 ADuM3151 磁隔离ADC模块
-
电机驱动:HCPL-316J 光耦隔离IGBT驱动
-
通信总线:CTM1050T 隔离CAN收发器
-
-
PCB设计要点

-
软件滤波算法
// 力传感器滑动平均滤波 #define FILTER_WINDOW 5 float Force_Filter(float raw_data) { static float buffer[FILTER_WINDOW] = {0}; static uint8_t index = 0; float sum = 0; buffer[index] = raw_data; index = (index+1) % FILTER_WINDOW; for(uint8_t i=0; i<FILTER_WINDOW; i++) sum += buffer[i]; return sum / FILTER_WINDOW; }
系统工作流程
-
初始化阶段
-
自检传感器/执行器状态
-
加载预设试验参数(质量/高度/采样率)
-
-
锤头提升阶段
-
PID闭环控制电机升至目标高度
-
实时监测安全联锁信号
-
-
冲击触发阶段
-
释放电磁锁存装置
-
FPGA启动1MHz高速采集
-
实时监测二次冲击风险
-
-
数据后处理阶段
-
计算能量吸收曲线
-
检测峰值力/失效点特征
-
生成PDF测试报告
-
该设计已通过EMC Class B认证,实测数据表明:
-
锤头定位精度:±0.05mm
-
力值采样延时:< 500ns
-
从冲击到生成报告:< 3s
-
抗干扰能力:在10V/m射频场中误差<0.5%
扩展:增加千兆以太网接口支持远程调试,集成温度补偿算法提升低温环境测量精度。


















 33
33

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









