







【2025.5.24补】 附一篇SVD好文https://zhuanlan.zhihu.com/p/29846048![]() https://zhuanlan.zhihu.com/p/29846048
https://zhuanlan.zhihu.com/p/29846048
SVD与傅里叶变换均为图像处理的典型方法。
两者在分析方式上有很多相似之处,比如在图像压缩时,两者均可以通过舍弃较小影响因素的分量来实现。下面对两者相似性进行分析。假设读者已经对SVD和傅里叶变换有了足够了解,如果需要复习,请点击
SVD(奇异值分解)
奇异值分解按照固定方式,将矩阵A分解为三个矩阵。从形状上来说,假设A 为M*N,则U形状为M*M, Σ形状为M*N, V形状为N*N。 在线性代数中,大家学过,方阵代表了同维度的线性变换,由于U、V被限定为正交矩阵,所以从几何意义上来说,U、V代表了旋转、反射变换。中间的Σ矩阵则囊括了 拉伸、升降维的作用。
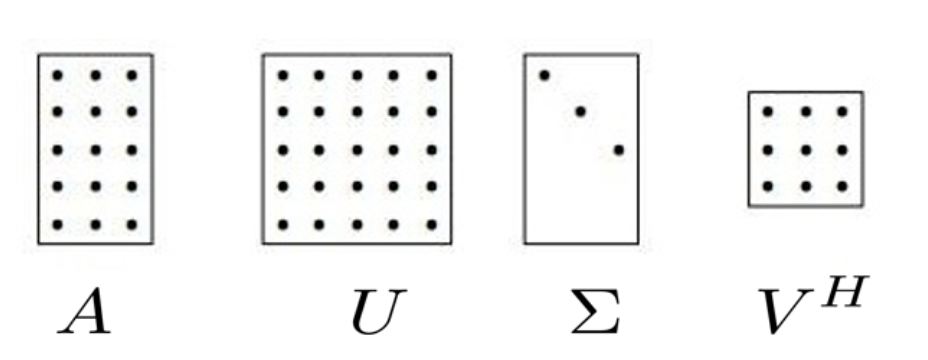 那么一个矩阵通过SVD分解后,其线性变换“影响力大小”,实际上是通过Σ矩阵的拉伸表示的,拉伸幅度越大,显然对矩阵的影响力越大。这就是SVD的思想。
那么一个矩阵通过SVD分解后,其线性变换“影响力大小”,实际上是通过Σ矩阵的拉伸表示的,拉伸幅度越大,显然对矩阵的影响力越大。这就是SVD的思想。
Fourier Transformation(傅里叶变换)
傅里叶变换的思想在于“一切皆可正余弦拟合”。也就是说,今天一个矩阵也可使用二维傅里叶变换表示。一维傅里叶变换写成矩阵如下。二维的情况下, f = Q F P, 假设 f 是一个M*N矩阵,则Q为M*M, P 为N*N, F为M*N。
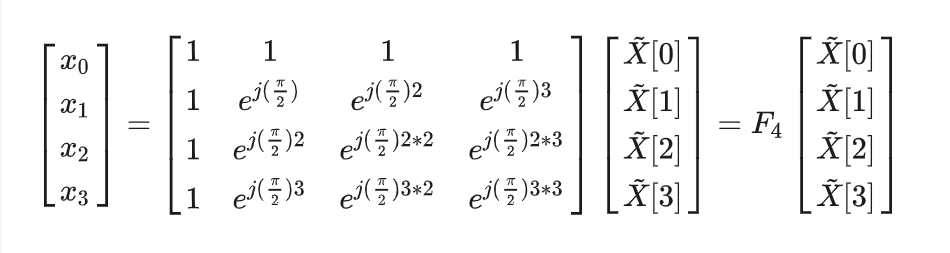
经过傅里叶分解后,一副图像可以表示成M*N 个正余弦正交函数基的形式(当然你也可以写成复数,可以证明,M*N个复数基和上述正余弦基完全等价,这是由欧拉公式指出的)
其中高频信号表征了细节信息,低频信号表征主体信息,那么在进行压缩的时候,自然而然通过舍弃高频信号实现。
对比分析
笔者在初学时希望在数学上找到两者统一,但这样的探索虽然有最终解释,但并不直观,原因是线性代数工具太过强大,能够把两者写成相似形式。 事实上,两者在寻找矩阵的“主要成分”上,思路完全不同。
SVD的思路是,现在读者掌握了一定汽车相关知识,给出一辆特斯拉新款车,希望读者根据效果去分析出其动力系统、供电系统等系统具体如何构成。
傅里叶变换的思路是,给出一个可以构成任何车辆的“万用组件库”,给出一辆特斯拉新款车,希望读者根据组件库像搭积木一样搭出这个车。
所以,一个的思路是“分解”,一个的思路是“合成”;直观上来看,合成也会比分解分析更加容易,以辅助读者记忆。SVD的时间复杂度是O(min(M,N)² · max(M,N)),FFT的时间复杂度是(M*N * log(M*N ))


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









