



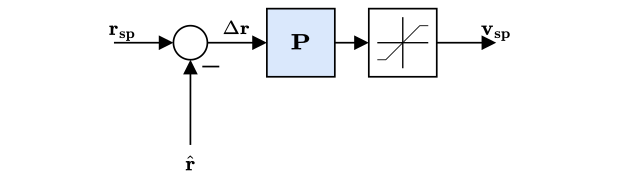
1、位置控制器
void PositionControl::_positionControl()
{
// vel_sp_position = (_pos_sp - _pos) * _gain_pos_p,均为Vector3f格式
Vector3f vel_sp_position = (_pos_sp - _pos).emult(_gain_pos_p);
/* 如果_vel_sp和vel_sp_position都不为NAN,_vel_sp += vel_sp_position;
如果_vel_sp为NAN,_vel_sp = vel_sp_position */
ControlMath::addIfNotNanVector3f(_vel_sp, vel_sp_position);
/* 如果vel_sp_position不为NAN,vel_sp_position += Vector3f();
如果vel_sp_position为NAN,vel_sp_position = Vector3f()
目的是保证没有NAN元素,用零元素覆盖NAN元素*/
ControlMath::setZeroIfNanVector3f(vel_sp_position);
// 限制水平设定速度,优先保留vel_sp_position.xy()信息
_vel_sp.xy() = ControlMath::constrainXY(vel_sp_position.xy(), (_vel_sp - vel_sp_position).xy(), _lim_vel_horizontal);
// 限制z方向速度输出
_vel_sp(2) = math::constrain(_vel_sp(2), -_lim_vel_up, _lim_vel_down);
}
2、速度控制器
计算微分_vel_dot
float BlockDerivative::update(float input)
{
float output;
if (_initialized) {
output = _lowPass.update((input - getU()) / getDt());
} // 数据已经有过一次有效更新,计算当前输入信号与前一次输入信号之差,并除以时间步长 getDt()
else {
_lowPass.update(0.0f); // 假设input没有太多变化,传递零值
output = 0.0f; // 导数设置为0
_initialized = true;// 初始化标志设置为true
}
setU(input);
return output;
}
设计低通滤波器:
y[n]=a⋅x[n]+(1−a)⋅y[n−1] y[n] = a \cdot x[n] + (1 - a) \cdot y[n-1] y[n]=a⋅x[n]+(1−a)⋅y[n−1]
其中:y[n] 是当前输出,x[n] 是当前输入,y[n-1] 是前一次的输出,a 是滤波器系数,决定了滤波器的截止频率
float BlockLowPass::update(float input)
{
if (!PX4_ISFINITE(getState())) {
setState(input);
}
float b = 2 * M_PI_F * getFCut() * getDt();
float a = b / (1 + b);
//低通滤波器离散时间传递函数
setState(a * input + (1 - a)*getState());
return getState();
}
加速度控制
void PositionControl::_accelerationControl()
{
// 通过 _acc_sp 的前两个分量取负值,并将第三个分量设为 CONSTANTS_ONE_G (标准重力加速度),生成一个新的三维向量 body_z
Vector3f body_z = Vector3f(-_acc_sp(0), -_acc_sp(1), CONSTANTS_ONE_G).normalized();
// 对 body_z 进行倾斜限制,里面由向量点积求角度的计算公式有问题,但是对整体计算没有太大影响,可以起到限位作用
ControlMath::limitTilt(body_z, Vector3f(0, 0, 1), _lim_tilt);
// 相当于 F= a( f/g ) - f , f~mg, 要注意_hover_thrust是如何传递的
float collective_thrust = _acc_sp(2) * (_hover_thrust / CONSTANTS_ONE_G) - _hover_thrust;
// collective_thrust 投影到机体姿态上,确保推理方向与机体姿态方向一致
collective_thrust /= (Vector3f(0, 0, 1).dot(body_z));
// 限制在最小推力
collective_thrust = math::min(collective_thrust, -_lim_thr_min);
// 计算 _thr_sp
_thr_sp = body_z * collective_thrust;
}
速度控制器代码
void PositionControl::_velocityControl(const float dt)
{
// 限制垂直方向速度积分
_vel_int(2) = math::constrain(_vel_int(2), -CONSTANTS_ONE_G, CONSTANTS_ONE_G);
// PID velocity control
Vector3f vel_error = _vel_sp - _vel;
// 运行PID控制器,_vel_dot通过 PositionControl::setState获得,即为当前加速度
Vector3f acc_sp_velocity = vel_error.emult(_gain_vel_p) + _vel_int - _vel_dot.emult(_gain_vel_d);
/* 如果_acc_sp和acc_sp_velocity都不为NAN,_acc_sp += acc_sp_velocity;
如果_acc_sp为NAN,_acc_sp = acc_sp_velocity */
ControlMath::addIfNotNanVector3f(_acc_sp, acc_sp_velocity);
// _acc_sp ——> _thr_sp
_accelerationControl();
// 垂直方向上抗风偏,防止系统在推力达到限制时不会积累过多误差
// 假如 _thr_sp(2) 为-0.5,_lim_thr_min 为1, 升力绝对值小于 _lim_thr_min, 速度误差为正,即正在下降,归零使不再下降
// 假如 _thr_sp(2) 为-6,_lim_thr_max 为5, 升力绝对值大于 _lim_thr_max, 速度误差为负,即正在上升,归零使不再上升
if ((_thr_sp(2) >= -_lim_thr_min && vel_error(2) >= 0.f) ||
(_thr_sp(2) <= -_lim_thr_max && vel_error(2) <= 0.f)) {
vel_error(2) = 0.f;
}
/* 优先保持垂推力,确保水平推力在合理范围内*/
const Vector2f thrust_sp_xy(_thr_sp); // explicit Vector2(const Vector3 &other)
const float thrust_sp_xy_norm = thrust_sp_xy.norm();
const float thrust_max_squared = math::sq(_lim_thr_max);
// 保持水平推力余量的同时,确定剩余的垂直推力
const float allocated_horizontal_thrust = math::min(thrust_sp_xy_norm, _lim_thr_xy_margin);
const float thrust_z_max_squared = thrust_max_squared - math::sq(allocated_horizontal_thrust);
// 限制最大垂直推力
_thr_sp(2) = math::max(_thr_sp(2), -sqrtf(thrust_z_max_squared));
// 确定优先控制垂直推力后剩余的水平推力
const float thrust_max_xy_squared = thrust_max_squared - math::sq(_thr_sp(2));
float thrust_max_xy = 0.f;
if (thrust_max_xy_squared > 0.f) {
thrust_max_xy = sqrtf(thrust_max_xy_squared);
}
// 得到水平推力
if (thrust_sp_xy_norm > thrust_max_xy) {
_thr_sp.xy() = thrust_sp_xy / thrust_sp_xy_norm * thrust_max_xy;
}
// Use tracking Anti-Windup for horizontal direction: during saturation, the integrator is used to unsaturate the output
// see Anti-Reset Windup for PID controllers, L.Rundqwist, 1990
// 实际产生的加速度,相当于 a = F * (g / f) = F * (1/m) , 水平方向抗风偏
const Vector2f acc_sp_xy_produced = Vector2f(_thr_sp) * (CONSTANTS_ONE_G / _hover_thrust);
const float arw_gain = 2.f / _gain_vel_p(0); // 抗风偏增益
// The produced acceleration can be greater or smaller than the desired acceleration due to the saturations and the actual vertical thrust (computed independently).
// The ARW loop needs to run if the signal is saturated only.
const Vector2f acc_sp_xy = _acc_sp.xy(); //提取水平分量
// 确定受限的水平加速度
const Vector2f acc_limited_xy = (acc_sp_xy.norm_squared() > acc_sp_xy_produced.norm_squared())
? acc_sp_xy_produced
: acc_sp_xy;
// 在信号饱和时,调整速度误差以防止积分器累积过多的误差
vel_error.xy() = Vector2f(vel_error) - arw_gain * (acc_sp_xy - acc_limited_xy);
// Make sure integral doesn't get NAN
ControlMath::setZeroIfNanVector3f(vel_error);
// 更新速度控制积分项
_vel_int += vel_error.emult(_gain_vel_i) * dt;
}
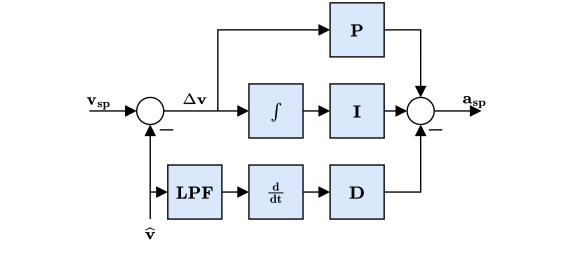
vspv_{sp}vsp由位置控制器输出
v^\widehat{v}v为当前实际速度,通过当前状态states得到
void PositionControl::setState(const PositionControlStates &states)
{
_pos = states.position;
_vel = states.velocity;
_yaw = states.yaw;
_vel_dot = states.acceleration;
}
states在run中通过
PositionControlStates states{set_vehicle_states(vehicle_local_position)};定义
{}中使用set_vehicle_states将vehicle_local_position中的posion.xyz/velocity.xyz/yaw直接赋值、acc.xyz由速度微分后再赋值给函数中局部变量states,states作为函数返回值并赋给所定义的states
vehicle_local_position通过_local_pos_sub.update(&vehicle_local_position)订阅更新
而PositionControl::setState又在run中通过_control.setState(states);调用
3、位置控制整体逻辑
void MulticopterPositionControl::Run()
{
/* 开始时检查是否应该退出 */
if (should_exit()) {
_local_pos_sub.unregisterCallback();
exit_and_cleanup();
return;
}
// reschedule backup
ScheduleDelayed(100_ms); //任务调度,周期100ms
parameters_update(false); //更新参数,参数为false,保证只有_parameter_update_sub更新时才会执行
perf_begin(_cycle_perf); //性能计数,测量代码执行的时间
vehicle_local_position_s vehicle_local_position //定义本地位置结构体
if (_local_pos_sub.update(&vehicle_local_position)) {
const float dt =
math::constrain(((vehicle_local_position.timestamp_sample - _time_stamp_last_loop) * 1e-6f), 0.002f, 0.04f);
_time_stamp_last_loop = vehicle_local_position.timestamp_sample;
// dt的数量级,2ms—40ms?,和任务调度周期有什么关系?
// set _dt in controllib Block for BlockDerivative
setDt(dt);
if (_vehicle_control_mode_sub.updated()) {
//位置控制状态传递
const bool previous_position_control_enabled = _vehicle_control_mode.flag_multicopter_position_control_enabled;
//如果更新_vehicle_control_mode成功
if (_vehicle_control_mode_sub.update(&_vehicle_control_mode)) {
// 之前的位置控制模式未启用,而现在启用了位置控制模式,表示位置控制模式刚刚启用
if (!previous_position_control_enabled && _vehicle_control_mode.flag_multicopter_position_control_enabled) {
//更新时间戳,记录位置模式启动时间
_time_position_control_enabled = _vehicle_control_mode.timestamp;
}
// 位置模式刚刚禁用
else if (previous_position_control_enabled && !_vehicle_control_mode.flag_multicopter_position_control_enabled) {
// clear existing setpoint when controller is no longer active
_setpoint = PositionControl::empty_trajectory_setpoint;
}
}
}
//更新着陆状态
_vehicle_land_detected_sub.update(&_vehicle_land_detected);
//更新悬停推力估计值
if (_param_mpc_use_hte.get()) {
hover_thrust_estimate_s hte;
if (_hover_thrust_estimate_sub.update(&hte)) {
if (hte.valid) {
_control.updateHoverThrust(hte.hover_thrust);
}
}
}
//使用列表初始化语法将 set_vehicle_states(vehicle_local_position) 的返回值赋给 states 对象
PositionControlStates states{set_vehicle_states(vehicle_local_position)};
// if a goto setpoint available this publishes a trajectory setpoint to go there
if (_goto_control.checkForSetpoint(vehicle_local_position.timestamp_sample,
_vehicle_control_mode.flag_multicopter_position_control_enabled)) {
_goto_control.update(dt, states.position, states.yaw);
}
// 从更新中获取轨迹设定点
_trajectory_setpoint_sub.update(&_setpoint);
// 调整轨迹设定点,确保其与EKF重置后的状态一致,首先判断设定点时间戳与当前时间戳,然后判断各轴重置计数值是否不同,随后调整设定点速度/位置/航向
adjustSetpointForEKFResets(vehicle_local_position, _setpoint);
// 检查是否使用多旋翼位置控制模式
if (_vehicle_control_mode.flag_multicopter_position_control_enabled) {
// set failsafe setpoint if there hasn't been a new trajectory setpoint since position control started
// 如果轨迹设定点的时间戳早于位置控制模式启用的时间,并且当前时间戳晚于位置控制模式启用的时间
if ((_setpoint.timestamp < _time_position_control_enabled)
&& (vehicle_local_position.timestamp_sample > _time_position_control_enabled)) {
// 在没有新的轨迹设定点时,使用故障保护设定点进行控制
// states.velocity为有限值,failsafe_setpoint.velocity设置为0值,无人机停止
// states.velocity无限,failsafe_setpoint.acceleration水平方向设为0,垂直方向速度设为降落速度
_setpoint = generateFailsafeSetpoint(vehicle_local_position.timestamp_sample, states, false);
}
}
if (_vehicle_control_mode.flag_multicopter_position_control_enabled
&& (_setpoint.timestamp >= _time_position_control_enabled)) {
// update vehicle constraints and handle smooth takeoff
_vehicle_constraints_sub.update(&_vehicle_constraints);
// fix to prevent the takeoff ramp to ramp to a too high value or get stuck because of NAN
// TODO: this should get obsolete once the takeoff limiting moves into the flight tasks
if (!PX4_ISFINITE(_vehicle_constraints.speed_up) || (_vehicle_constraints.speed_up > _param_mpc_z_vel_max_up.get())) {
_vehicle_constraints.speed_up = _param_mpc_z_vel_max_up.get();
}
// 检查是否启用offboard模式
if (_vehicle_control_mode.flag_control_offboard_enabled) {
// want_takeoff 变量为真表示飞行器已解锁(armed),并且当前时间戳小于设定点时间戳加 1 秒
const bool want_takeoff = _vehicle_control_mode.flag_armed
&& (vehicle_local_position.timestamp_sample < _setpoint.timestamp + 1_s);
if (want_takeoff && PX4_ISFINITE(_setpoint.position[2])
&& (_setpoint.position[2] < states.position(2))) {
_vehicle_constraints.want_takeoff = true;
} else if (want_takeoff && PX4_ISFINITE(_setpoint.velocity[2])
&& (_setpoint.velocity[2] < 0.f)) {
_vehicle_constraints.want_takeoff = true;
} else if (want_takeoff && PX4_ISFINITE(_setpoint.acceleration[2])
&& (_setpoint.acceleration[2] < 0.f)) {
_vehicle_constraints.want_takeoff = true;
} else {
_vehicle_constraints.want_takeoff = false;
}
// override with defaults
_vehicle_constraints.speed_up = _param_mpc_z_vel_max_up.get();
_vehicle_constraints.speed_down = _param_mpc_z_vel_max_dn.get();
}
bool skip_takeoff = _param_com_throw_en.get();
// handle smooth takeoff,更新起飞状态
_takeoff.updateTakeoffState(_vehicle_control_mode.flag_armed, _vehicle_land_detected.landed,
_vehicle_constraints.want_takeoff,
_vehicle_constraints.speed_up, skip_takeoff, vehicle_local_position.timestamp_sample);
const bool not_taken_off = (_takeoff.getTakeoffState() < TakeoffState::rampup);
const bool flying = (_takeoff.getTakeoffState() >= TakeoffState::flight);
const bool flying_but_ground_contact = (flying && _vehicle_land_detected.ground_contact);
// 如果尚未起飞,设置悬停推力
if (!flying) {
_control.setHoverThrust(_param_mpc_thr_hover.get());
}
// make sure takeoff ramp is not amended by acceleration feed-forward
if (_takeoff.getTakeoffState() == TakeoffState::rampup && PX4_ISFINITE(_setpoint.velocity[2])) {
_setpoint.acceleration[2] = NAN;
}
// 尚未起飞或在飞行中接触地面,代码会重置设定点并防止积分器累积
if (not_taken_off || flying_but_ground_contact) {
// we are not flying yet and need to avoid any corrections
_setpoint = PositionControl::empty_trajectory_setpoint;
_setpoint.timestamp = vehicle_local_position.timestamp_sample;
Vector3f(0.f, 0.f, 100.f).copyTo(_setpoint.acceleration); // High downwards acceleration to make sure there's no thrust
// prevent any integrator windup
_control.resetIntegral();
}
// limit tilt during takeoff ramupup
// 如果飞行器尚未进入飞行状态(TakeoffState::flight),则使用地面倾斜角度限制参数 _param_mpc_tiltmax_lnd;否则,使用空中倾斜角度限制参数 _param_mpc_tiltmax_air
const float tilt_limit_deg = (_takeoff.getTakeoffState() < TakeoffState::flight)
? _param_mpc_tiltmax_lnd.get() : _param_mpc_tiltmax_air.get();
// tilt_limit_deg ->弧度制,通过 _tilt_limit_slew_rate 更新,传到PositionControl::_lim_tilt
_control.setTiltLimit(_tilt_limit_slew_rate.update(math::radians(tilt_limit_deg), dt));
// 更新垂直速度限制
const float speed_up = _takeoff.updateRamp(dt,
PX4_ISFINITE(_vehicle_constraints.speed_up) ? _vehicle_constraints.speed_up : _param_mpc_z_vel_max_up.get());
const float speed_down = PX4_ISFINITE(_vehicle_constraints.speed_down) ? _vehicle_constraints.speed_down :
_param_mpc_z_vel_max_dn.get();
// Allow ramping from zero thrust on takeoff
const float minimum_thrust = flying ? _param_mpc_thr_min.get() : 0.f;
// 将最小推力和最大推力作为推力限制
_control.setThrustLimits(minimum_thrust, _param_mpc_thr_max.get());
// 设置水平速度最大值
float max_speed_xy = _param_mpc_xy_vel_max.get();
// 保证水平速度不超过飞行器物理限制
if (PX4_ISFINITE(vehicle_local_position.vxy_max)) {
max_speed_xy = math::min(max_speed_xy, vehicle_local_position.vxy_max);
}
// 设置飞行器速度限制
_control.setVelocityLimits(
max_speed_xy,
math::min(speed_up, _param_mpc_z_vel_max_up.get()), // takeoff ramp starts with negative velocity limit
math::max(speed_down, 0.f));
// 保证控制器使用最新的设定点计算飞行器控制输出
_control.setInputSetpoint(_setpoint);
// update states,需满足一系列条件确定是否需要更新垂直速度
if (!PX4_ISFINITE(_setpoint.position[2])
&& PX4_ISFINITE(_setpoint.velocity[2]) && (fabsf(_setpoint.velocity[2]) > FLT_EPSILON)
&& PX4_ISFINITE(vehicle_local_position.z_deriv) && vehicle_local_position.z_valid && vehicle_local_position.v_z_valid) {
// A change in velocity is demanded and the altitude is not controlled.
// Set velocity to the derivative of position
// because it has less bias but blend it in across the landing speed range
// < MPC_LAND_SPEED: ramp up using altitude derivative without a step
// >= MPC_LAND_SPEED: use altitude derivative
// 计算0-1的权重,_setpoint.velocity[2] / _param_mpc_land_speed.get()
float weighting = fminf(fabsf(_setpoint.velocity[2]) / _param_mpc_land_speed.get(), 1.f);
// 垂直方向速度插值计算,高度导数(垂直速度估计值) * weighting + 垂直速度 * (1.f - weighting)
states.velocity(2) = vehicle_local_position.z_deriv * weighting + vehicle_local_position.vz * (1.f - weighting);
}
// 传递更新后的状态
_control.setState(states);
// Run position control
if (!_control.update(dt)) {
// Failsafe 位置控制更新失败,执行故障保护措施
_vehicle_constraints = {0, NAN, NAN, false, {}}; // reset constraints
// 生成一个FailsafeSetpoint,传递给控制器
_control.setInputSetpoint(generateFailsafeSetpoint(vehicle_local_position.timestamp_sample, states, true));
// 速度限制
_control.setVelocityLimits(_param_mpc_xy_vel_max.get(), _param_mpc_z_vel_max_up.get(), _param_mpc_z_vel_max_dn.get());
// 再次运行位置控制
_control.update(dt);
}
// Publish internal position control setpoints
// on top of the input/feed-forward setpoints these containt the PID corrections
// This message is used by other modules (such as Landdetector) to determine vehicle intention.
vehicle_local_position_setpoint_s local_pos_sp{};
_control.getLocalPositionSetpoint(local_pos_sp);
local_pos_sp.timestamp = hrt_absolute_time();
_local_pos_sp_pub.publish(local_pos_sp);
// Publish attitude setpoint output
vehicle_attitude_setpoint_s attitude_setpoint{};
_control.getAttitudeSetpoint(attitude_setpoint);
attitude_setpoint.timestamp = hrt_absolute_time();
_vehicle_attitude_setpoint_pub.publish(attitude_setpoint);
} else {
// an update is necessary here because otherwise the takeoff state doesn't get skipped with non-altitude-controlled modes
// 更新飞行状态
_takeoff.updateTakeoffState(_vehicle_control_mode.flag_armed, _vehicle_land_detected.landed, false, 10.f, true,
vehicle_local_position.timestamp_sample);
}
// Publish takeoff status
// 获取当前起飞状态并转换为uint8_t类型
const uint8_t takeoff_state = static_cast<uint8_t>(_takeoff.getTakeoffState());
// 检查当前起飞状态和倾斜限制是否发生了变化
if (takeoff_state != _takeoff_status_pub.get().takeoff_state
|| !isEqualF(_tilt_limit_slew_rate.getState(), _takeoff_status_pub.get().tilt_limit)) {
_takeoff_status_pub.get().takeoff_state = takeoff_state;
_takeoff_status_pub.get().tilt_limit = _tilt_limit_slew_rate.getState();
_takeoff_status_pub.get().timestamp = hrt_absolute_time();
_takeoff_status_pub.update();
}
}
// 结束性能计数器的计时过程
perf_end(_cycle_perf);
}
_trajectory_setpoint_pub.publish(trajectory_setpoint);在GotoControl中实现
4、角度控制器
姿态控制器更新
matrix::Vector3f AttitudeControl::update(const Quatf &q) const
{
// _attitude_setpoint_q 由 _vehicle_attitude_setpoint_sub.copy position_control 中的数据得到
Quatf qd = _attitude_setpoint_q;
// 计算减小的预期姿态,忽略车辆的偏航,优先考虑侧倾和俯仰 dcm方向余弦矩阵
const Vector3f e_z = q.dcm_z();
const Vector3f e_z_d = qd.dcm_z();
Quatf qd_red(e_z, e_z_d);
if (fabsf(qd_red(1)) > (1.f - 1e-5f) || fabsf(qd_red(2)) > (1.f - 1e-5f)) {
// In the infinitesimal corner case where the vehicle and thrust have the completely opposite direction,
// full attitude control anyways generates no yaw input and directly takes the combination of
// roll and pitch leading to the correct desired yaw. Ignoring this case would still be totally safe and stable.
qd_red = qd;
} else {
// transform rotation from current to desired thrust vector into a world frame reduced desired attitude
qd_red *= q;
}
// mix full and reduced desired attitude
Quatf q_mix = qd_red.inversed() * qd;
q_mix.canonicalize();
// catch numerical problems with the domain of acosf and asinf
q_mix(0) = math::constrain(q_mix(0), -1.f, 1.f);
q_mix(3) = math::constrain(q_mix(3), -1.f, 1.f);
qd = qd_red * Quatf(cosf(_yaw_w * acosf(q_mix(0))), 0, 0, sinf(_yaw_w * asinf(q_mix(3))));
// quaternion attitude control law, qe is rotation from q to qd
const Quatf qe = q.inversed() * qd;
// using sin(alpha/2) scaled rotation axis as attitude error (see quaternion definition by axis angle)
// also taking care of the antipodal unit quaternion ambiguity
const Vector3f eq = 2.f * qe.canonical().imag();
// calculate angular rates setpoint
Vector3f rate_setpoint = eq.emult(_proportional_gain);
// Feed forward the yaw setpoint rate.
// yawspeed_setpoint is the feed forward commanded rotation around the world z-axis,
// but we need to apply it in the body frame (because _rates_sp is expressed in the body frame).
// Therefore we infer the world z-axis (expressed in the body frame) by taking the last column of R.transposed (== q.inversed)
// and multiply it by the yaw setpoint rate (yawspeed_setpoint).
// This yields a vector representing the commanded rotatation around the world z-axis expressed in the body frame
// such that it can be added to the rates setpoint.
if (std::isfinite(_yawspeed_setpoint)) {
rate_setpoint += q.inversed().dcm_z() * _yawspeed_setpoint;
}
// limit rates
for (int i = 0; i < 3; i++) {
rate_setpoint(i) = math::constrain(rate_setpoint(i), -_rate_limit(i), _rate_limit(i));
}
return rate_setpoint;
}
姿态控制器main
void MulticopterAttitudeControl::Run()
{
if (should_exit()) {
_vehicle_attitude_sub.unregisterCallback();
exit_and_cleanup();
return;
}
perf_begin(_loop_perf);
// Check if parameters have changed
if (_parameter_update_sub.updated()) {
// clear update
parameter_update_s param_update;
_parameter_update_sub.copy(¶m_update);
updateParams();
parameters_updated();
}
// run controller on attitude updates
vehicle_attitude_s v_att;
if (_vehicle_attitude_sub.update(&v_att)) {
// Guard against too small (< 0.2ms) and too large (> 20ms) dt's.
const float dt = math::constrain(((v_att.timestamp_sample - _last_run) * 1e-6f), 0.0002f, 0.02f);
_last_run = v_att.timestamp_sample;
const Quatf q{v_att.q};
/* check for updates in other topics */
_manual_control_setpoint_sub.update(&_manual_control_setpoint);
_vehicle_control_mode_sub.update(&_vehicle_control_mode);
if (_vehicle_status_sub.updated()) {
vehicle_status_s vehicle_status;
if (_vehicle_status_sub.copy(&vehicle_status)) {
_vehicle_type_rotary_wing = (vehicle_status.vehicle_type == vehicle_status_s::VEHICLE_TYPE_ROTARY_WING);
_vtol = vehicle_status.is_vtol;
_vtol_in_transition_mode = vehicle_status.in_transition_mode;
_vtol_tailsitter = vehicle_status.is_vtol_tailsitter;
const bool armed = (vehicle_status.arming_state == vehicle_status_s::ARMING_STATE_ARMED);
_spooled_up = armed && hrt_elapsed_time(&vehicle_status.armed_time) > _param_com_spoolup_time.get() * 1_s;
}
}
if (_vehicle_land_detected_sub.updated()) {
vehicle_land_detected_s vehicle_land_detected;
if (_vehicle_land_detected_sub.copy(&vehicle_land_detected)) {
_landed = vehicle_land_detected.landed;
}
}
if (_vehicle_local_position_sub.updated()) {
vehicle_local_position_s vehicle_local_position;
if (_vehicle_local_position_sub.copy(&vehicle_local_position)) {
_heading_good_for_control = vehicle_local_position.heading_good_for_control;
}
}
bool attitude_setpoint_generated = false;
const bool is_hovering = (_vehicle_type_rotary_wing && !_vtol_in_transition_mode);
// vehicle is a tailsitter in transition mode
const bool is_tailsitter_transition = (_vtol_tailsitter && _vtol_in_transition_mode);
const bool run_att_ctrl = _vehicle_control_mode.flag_control_attitude_enabled && (is_hovering
|| is_tailsitter_transition);
if (run_att_ctrl) {
// Generate the attitude setpoint from stick inputs if we are in Manual/Stabilized mode
if (_vehicle_control_mode.flag_control_manual_enabled &&
!_vehicle_control_mode.flag_control_altitude_enabled &&
!_vehicle_control_mode.flag_control_velocity_enabled &&
!_vehicle_control_mode.flag_control_position_enabled) {
generate_attitude_setpoint(q, dt, _reset_yaw_sp);
attitude_setpoint_generated = true;
} else {
_man_roll_input_filter.reset(0.f);
_man_pitch_input_filter.reset(0.f);
}
// Check for new attitude setpoint
if (_vehicle_attitude_setpoint_sub.updated()) {
vehicle_attitude_setpoint_s vehicle_attitude_setpoint;
if (_vehicle_attitude_setpoint_sub.copy(&vehicle_attitude_setpoint)
&& (vehicle_attitude_setpoint.timestamp > _last_attitude_setpoint)) {
_attitude_control.setAttitudeSetpoint(Quatf(vehicle_attitude_setpoint.q_d), vehicle_attitude_setpoint.yaw_sp_move_rate);
_thrust_setpoint_body = Vector3f(vehicle_attitude_setpoint.thrust_body);
_last_attitude_setpoint = vehicle_attitude_setpoint.timestamp;
}
}
// Check for a heading reset
if (_quat_reset_counter != v_att.quat_reset_counter) {
const Quatf delta_q_reset(v_att.delta_q_reset);
// for stabilized attitude generation only extract the heading change from the delta quaternion
_man_yaw_sp = wrap_pi(_man_yaw_sp + Eulerf(delta_q_reset).psi());
if (v_att.timestamp > _last_attitude_setpoint) {
// adapt existing attitude setpoint unless it was generated after the current attitude estimate
_attitude_control.adaptAttitudeSetpoint(delta_q_reset);
}
_quat_reset_counter = v_att.quat_reset_counter;
}
/*q->rates_sp*/
Vector3f rates_sp = _attitude_control.update(q);
const hrt_abstime now = hrt_absolute_time();
autotune_attitude_control_status_s pid_autotune;
if (_autotune_attitude_control_status_sub.copy(&pid_autotune)) {
if ((pid_autotune.state == autotune_attitude_control_status_s::STATE_ROLL
|| pid_autotune.state == autotune_attitude_control_status_s::STATE_PITCH
|| pid_autotune.state == autotune_attitude_control_status_s::STATE_YAW
|| pid_autotune.state == autotune_attitude_control_status_s::STATE_TEST)
&& ((now - pid_autotune.timestamp) < 1_s)) {
rates_sp += Vector3f(pid_autotune.rate_sp);
}
}
// publish rate setpoint
vehicle_rates_setpoint_s rates_setpoint{};
rates_setpoint.roll = rates_sp(0);
rates_setpoint.pitch = rates_sp(1);
rates_setpoint.yaw = rates_sp(2);
_thrust_setpoint_body.copyTo(rates_setpoint.thrust_body);
rates_setpoint.timestamp = hrt_absolute_time();
_vehicle_rates_setpoint_pub.publish(rates_setpoint);
}
if (_landed) {
_manual_throttle_minimum.update(0.f, dt);
} else {
_manual_throttle_minimum.update(_param_mpc_manthr_min.get(), dt);
}
if (_spooled_up) {
_manual_throttle_maximum.update(1.f, dt);
} else {
_manual_throttle_maximum.setForcedValue(0.f);
}
// reset yaw setpoint during transitions, tailsitter.cpp generates
// attitude setpoint for the transition
_reset_yaw_sp = !attitude_setpoint_generated || !_heading_good_for_control || (_vtol && _vtol_in_transition_mode);
}
perf_end(_loop_perf);
}
5、角速率控制器
角速度更新
Vector3f RateControl::update(const Vector3f &rate, const Vector3f &rate_sp, const Vector3f &angular_accel,
const float dt, const bool landed)
{
// angular rates error
Vector3f rate_error = rate_sp - rate;
// PID control with feed forward
const Vector3f torque = _gain_p.emult(rate_error) + _rate_int - _gain_d.emult(angular_accel) + _gain_ff.emult(rate_sp);
// update integral only if we are not landed
if (!landed) {
updateIntegral(rate_error, dt);
}
return torque;
}
角速度控制器main
void
MulticopterRateControl::Run()
{
if (should_exit()) {
_vehicle_angular_velocity_sub.unregisterCallback();
exit_and_cleanup();
return;
}
perf_begin(_loop_perf);
// Check if parameters have changed
if (_parameter_update_sub.updated()) {
// clear update
parameter_update_s param_update;
_parameter_update_sub.copy(¶m_update);
updateParams();
parameters_updated();
}
/* run controller on gyro changes */
vehicle_angular_velocity_s angular_velocity;
if (_vehicle_angular_velocity_sub.update(&angular_velocity)) {
const hrt_abstime now = angular_velocity.timestamp_sample;
// Guard against too small (< 0.125ms) and too large (> 20ms) dt's.
const float dt = math::constrain(((now - _last_run) * 1e-6f), 0.000125f, 0.02f);
_last_run = now;
//列表初始化语法 {} 用于初始化 rates 变量
const Vector3f rates{angular_velocity.xyz};
const Vector3f angular_accel{angular_velocity.xyz_derivative};
/* check for updates in other topics */
_vehicle_control_mode_sub.update(&_vehicle_control_mode);
if (_vehicle_land_detected_sub.updated()) {
vehicle_land_detected_s vehicle_land_detected;
if (_vehicle_land_detected_sub.copy(&vehicle_land_detected)) {
_landed = vehicle_land_detected.landed;
_maybe_landed = vehicle_land_detected.maybe_landed;
}
}
_vehicle_status_sub.update(&_vehicle_status);
// use rates setpoint topic
vehicle_rates_setpoint_s vehicle_rates_setpoint{};
// 不使用姿态控制器
if (_vehicle_control_mode.flag_control_manual_enabled && !_vehicle_control_mode.flag_control_attitude_enabled) {
// generate the rate setpoint from sticks
manual_control_setpoint_s manual_control_setpoint;
if (_manual_control_setpoint_sub.update(&manual_control_setpoint)) {
// manual rates control - ACRO mode
const Vector3f man_rate_sp{
math::superexpo(manual_control_setpoint.roll, _param_mc_acro_expo.get(), _param_mc_acro_supexpo.get()),
math::superexpo(-manual_control_setpoint.pitch, _param_mc_acro_expo.get(), _param_mc_acro_supexpo.get()),
math::superexpo(manual_control_setpoint.yaw, _param_mc_acro_expo_y.get(), _param_mc_acro_supexpoy.get())};
_rates_setpoint = man_rate_sp.emult(_acro_rate_max);
_thrust_setpoint(2) = -(manual_control_setpoint.throttle + 1.f) * .5f;
_thrust_setpoint(0) = _thrust_setpoint(1) = 0.f;
// publish rate setpoint
vehicle_rates_setpoint.roll = _rates_setpoint(0);
vehicle_rates_setpoint.pitch = _rates_setpoint(1);
vehicle_rates_setpoint.yaw = _rates_setpoint(2);
_thrust_setpoint.copyTo(vehicle_rates_setpoint.thrust_body);
vehicle_rates_setpoint.timestamp = hrt_absolute_time();
_vehicle_rates_setpoint_pub.publish(vehicle_rates_setpoint);
}
// 使用姿态控制器,_vehicle_rates_setpoint_sub订阅vehicle_rates_setpoint
} else if (_vehicle_rates_setpoint_sub.update(&vehicle_rates_setpoint)) {
if (_vehicle_rates_setpoint_sub.copy(&vehicle_rates_setpoint)) {
_rates_setpoint(0) = PX4_ISFINITE(vehicle_rates_setpoint.roll) ? vehicle_rates_setpoint.roll : rates(0);
_rates_setpoint(1) = PX4_ISFINITE(vehicle_rates_setpoint.pitch) ? vehicle_rates_setpoint.pitch : rates(1);
_rates_setpoint(2) = PX4_ISFINITE(vehicle_rates_setpoint.yaw) ? vehicle_rates_setpoint.yaw : rates(2);
_thrust_setpoint = Vector3f(vehicle_rates_setpoint.thrust_body);
}
}
// run the rate controller
if (_vehicle_control_mode.flag_control_rates_enabled) {
// reset integral if disarmed
if (!_vehicle_control_mode.flag_armed || _vehicle_status.vehicle_type != vehicle_status_s::VEHICLE_TYPE_ROTARY_WING) {
_rate_control.resetIntegral();
}
// update saturation status from control allocation feedback
control_allocator_status_s control_allocator_status;
if (_control_allocator_status_sub.update(&control_allocator_status)) {
Vector<bool, 3> saturation_positive;
Vector<bool, 3> saturation_negative;
if (!control_allocator_status.torque_setpoint_achieved) {
for (size_t i = 0; i < 3; i++) {
if (control_allocator_status.unallocated_torque[i] > FLT_EPSILON) {
saturation_positive(i) = true;
} else if (control_allocator_status.unallocated_torque[i] < -FLT_EPSILON) {
saturation_negative(i) = true;
}
}
}
// TODO: send the unallocated value directly for better anti-windup
_rate_control.setSaturationStatus(saturation_positive, saturation_negative);
}
// run rate controller
const Vector3f att_control = _rate_control.update(rates, _rates_setpoint, angular_accel, dt, _maybe_landed || _landed);
// publish rate controller status
rate_ctrl_status_s rate_ctrl_status{};
_rate_control.getRateControlStatus(rate_ctrl_status);
rate_ctrl_status.timestamp = hrt_absolute_time();
_controller_status_pub.publish(rate_ctrl_status);
// publish thrust and torque setpoints
vehicle_thrust_setpoint_s vehicle_thrust_setpoint{};
vehicle_torque_setpoint_s vehicle_torque_setpoint{};
_thrust_setpoint.copyTo(vehicle_thrust_setpoint.xyz);
vehicle_torque_setpoint.xyz[0] = PX4_ISFINITE(att_control(0)) ? att_control(0) : 0.f;
vehicle_torque_setpoint.xyz[1] = PX4_ISFINITE(att_control(1)) ? att_control(1) : 0.f;
vehicle_torque_setpoint.xyz[2] = PX4_ISFINITE(att_control(2)) ? att_control(2) : 0.f;
// scale setpoints by battery status if enabled
if (_param_mc_bat_scale_en.get()) {
if (_battery_status_sub.updated()) {
battery_status_s battery_status;
if (_battery_status_sub.copy(&battery_status) && battery_status.connected && battery_status.scale > 0.f) {
_battery_status_scale = battery_status.scale;
}
}
if (_battery_status_scale > 0.f) {
for (int i = 0; i < 3; i++) {
vehicle_thrust_setpoint.xyz[i] = math::constrain(vehicle_thrust_setpoint.xyz[i] * _battery_status_scale, -1.f, 1.f);
vehicle_torque_setpoint.xyz[i] = math::constrain(vehicle_torque_setpoint.xyz[i] * _battery_status_scale, -1.f, 1.f);
}
}
}
vehicle_thrust_setpoint.timestamp_sample = angular_velocity.timestamp_sample;
vehicle_thrust_setpoint.timestamp = hrt_absolute_time();
_vehicle_thrust_setpoint_pub.publish(vehicle_thrust_setpoint);
vehicle_torque_setpoint.timestamp_sample = angular_velocity.timestamp_sample;
vehicle_torque_setpoint.timestamp = hrt_absolute_time();
_vehicle_torque_setpoint_pub.publish(vehicle_torque_setpoint);
updateActuatorControlsStatus(vehicle_torque_setpoint, dt);
}
}
perf_end(_loop_perf);
}
6、mixer混控
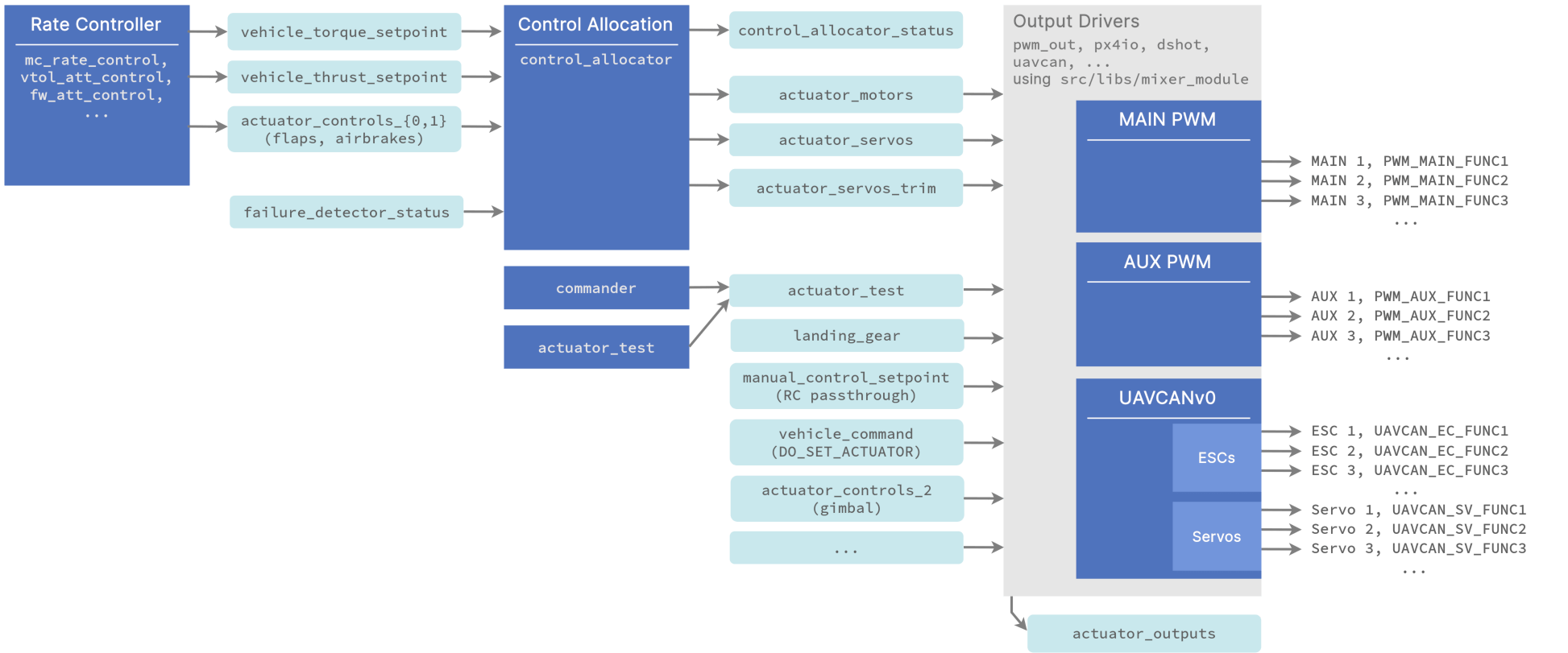
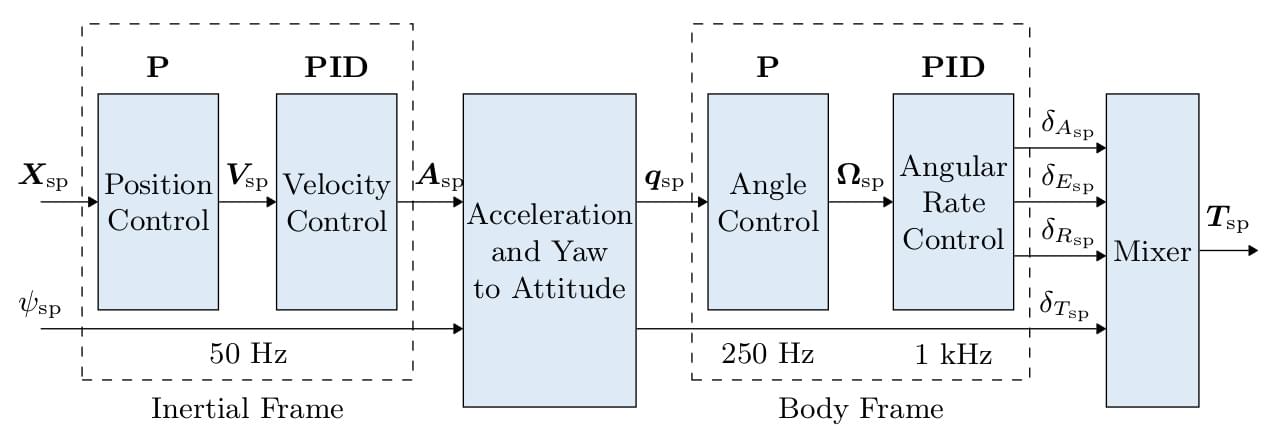
整体控制栈
px4任务调度相关——以姿态估计器attitude_estimator_q为例
https://blog.youkuaiyun.com/qq_36903625/article/details/123364923
可通过work_queue status命令查看运行中的工作队列
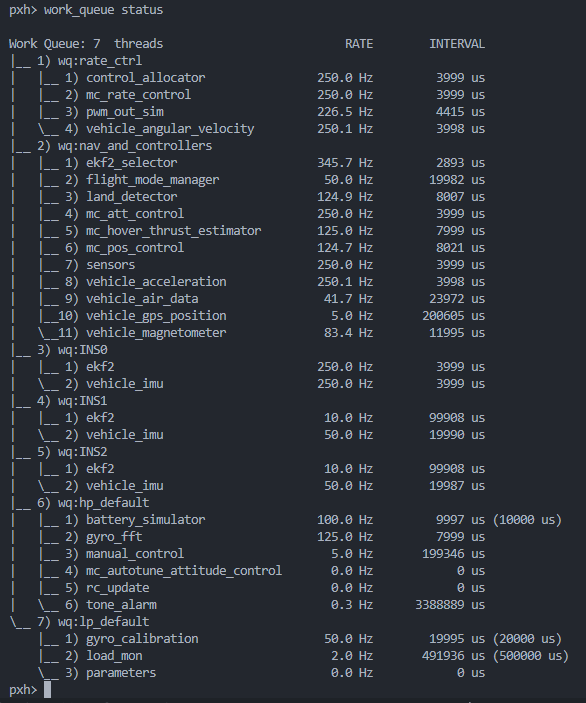
任务名由MODULE_NAME定义,工作队列px4::wq_configurations::nav_and_controllers
AttitudeEstimatorQ::AttitudeEstimatorQ() :
ModuleParams(nullptr),
WorkItem(MODULE_NAME, px4::wq_configurations::nav_and_controllers)
{
update_parameters(true);
}
任务调度频率 使用ScheduleOnInterval
混控器:hrt_abstime fixed_rate_scheduling_interval = 4_ms; // schedule at 250Hz
uorb消息发布和订阅
uORB图使用
- 模块modules灰色圆角,主题topics彩色矩形框
- 虚线:模块发布主题,实线:模块订阅主题,点划线:模块同时发布和订阅主题

uORBTopics.hpp
1、定义

















 759
759

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









