




基于Atlas 200I DK A2开发者套件安装ros2_20250809
############################################################################################
硬件:Altlas 200I DK A2(20T版本)
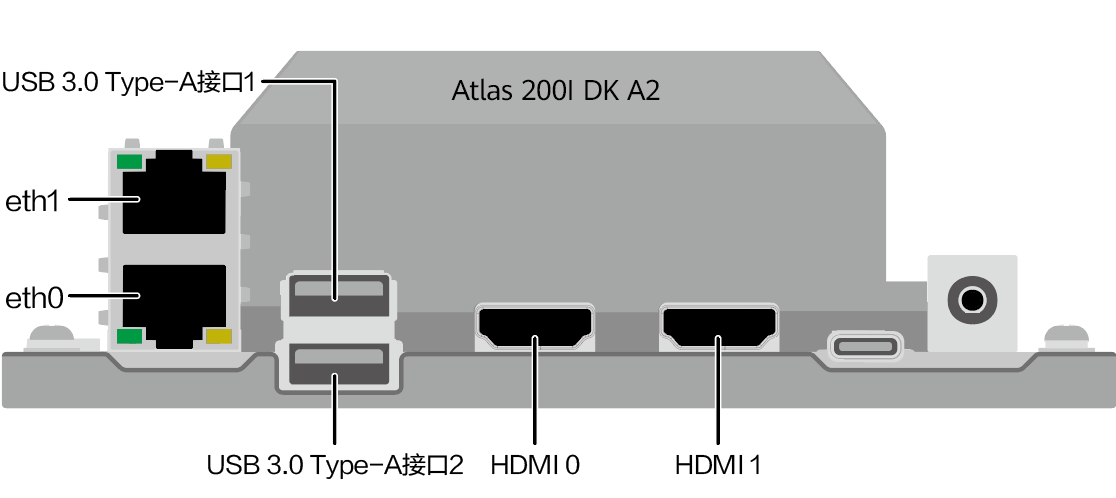
Altlas 200I DK A2开发者套件实物图:

############################################################################################
一、制卡:
Altlas 200I DK A2开发者套件通过
https://www.hiascend.com/document/detail/zh/Atlas200IDKA2DeveloperKit/23.0.RC2/qs/qs_0005.html
选择在线烧录Desktop-Image_23.0.RC3_ubuntu22.04的镜像版本制卡后,进行以下操作
二、开发者套件具体的版本信息如下:
| 关键参数 | 版本说明 |
|---|---|
| OS版本 | Ubuntu 22.04 LTS Arm64 |
| kernel版本 | 5.10.0+ |
| 固件与驱动版本 | 23.0 RC3 |
| CANN版本 | 7.0.RC1 |
将制做好操作系统的TF卡插回到开发者套件,上电将开发者套件的eth0口通过网线连接路由器(具体IP可通过HDMI0口连接到显示器登录输入ifconfig获知,或登录路由器获知,或连接串口到开发者套件下输入ifconfig获知),其中开发者套件的eth0口,如下图所示:
三、安装ros2
登录root身份执行以下命令完成ros2指定源的安装
# 切到root用户
su
# 输入密码Mind@123
apt-get update
curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | tee /etc/apt/sources.list.d/ros2.list > /dev/null
apt-get update
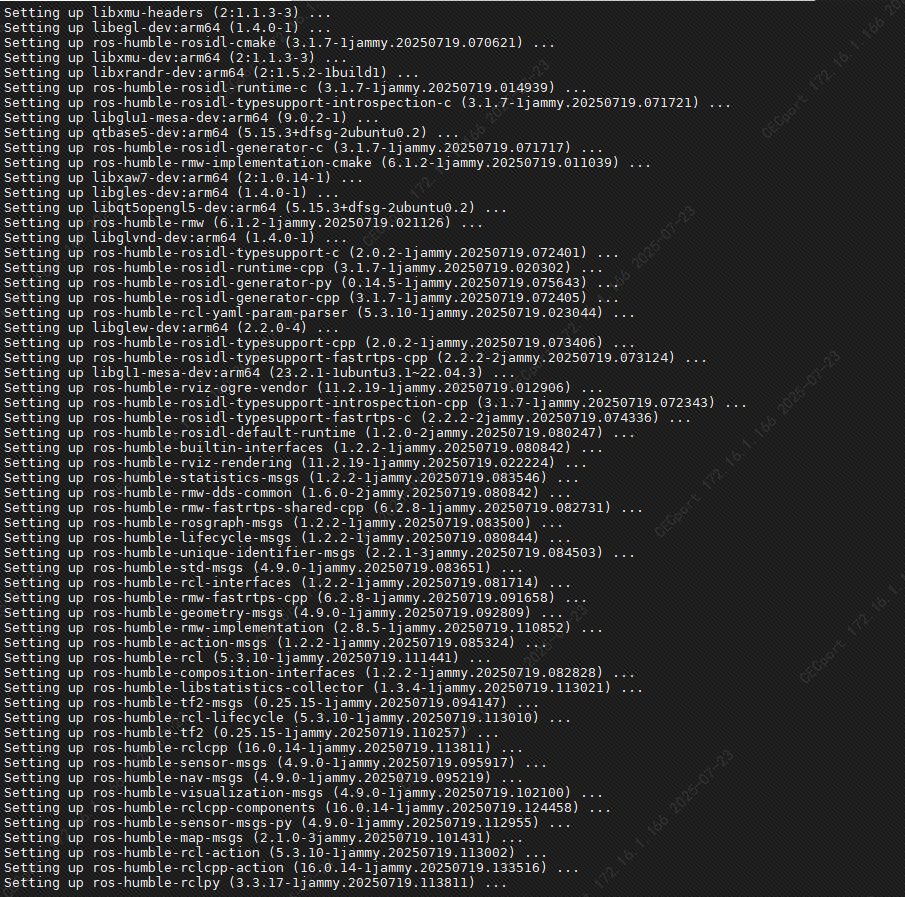
apt-get install -y ros-humble-rviz2
其中apt-get install -y ros-humble-rviz2 命令的安装过程截图:
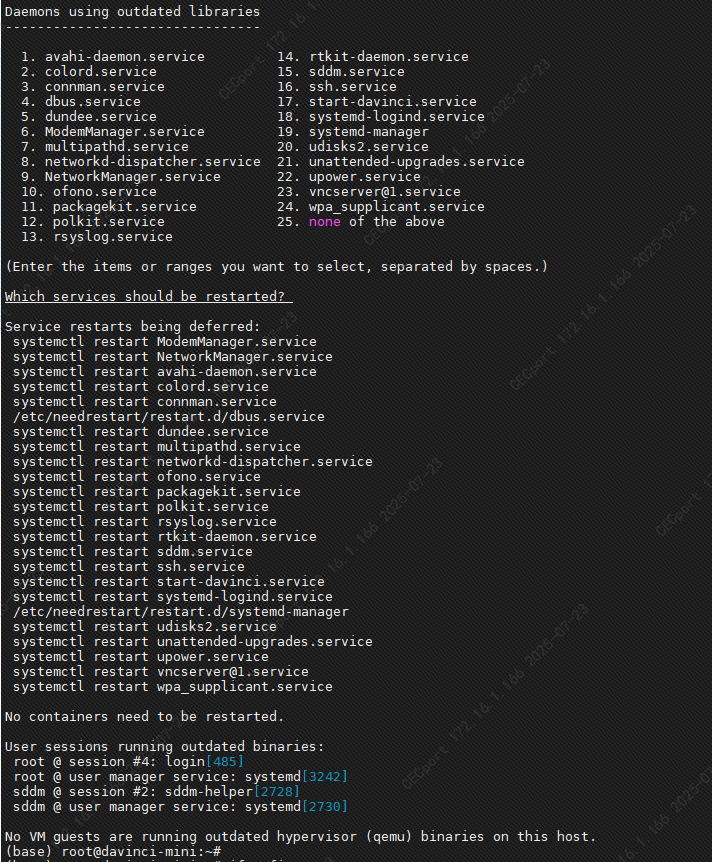
安装完成的截图(出现选择的时候,我这边是直接按的回车,不知是否有影响):
设置环境变量
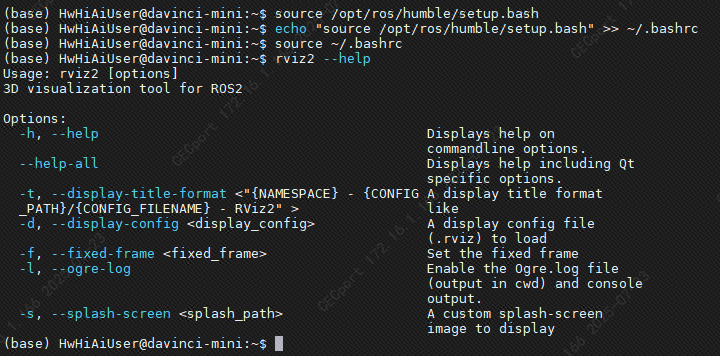
source /opt/ros/humble/setup.bash
或者为了避免每次打开终端都需要手动执行上述命令,可以将其添加到~/.bashrc文件中:
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc
执行rviz2 --help查看帮助信息:
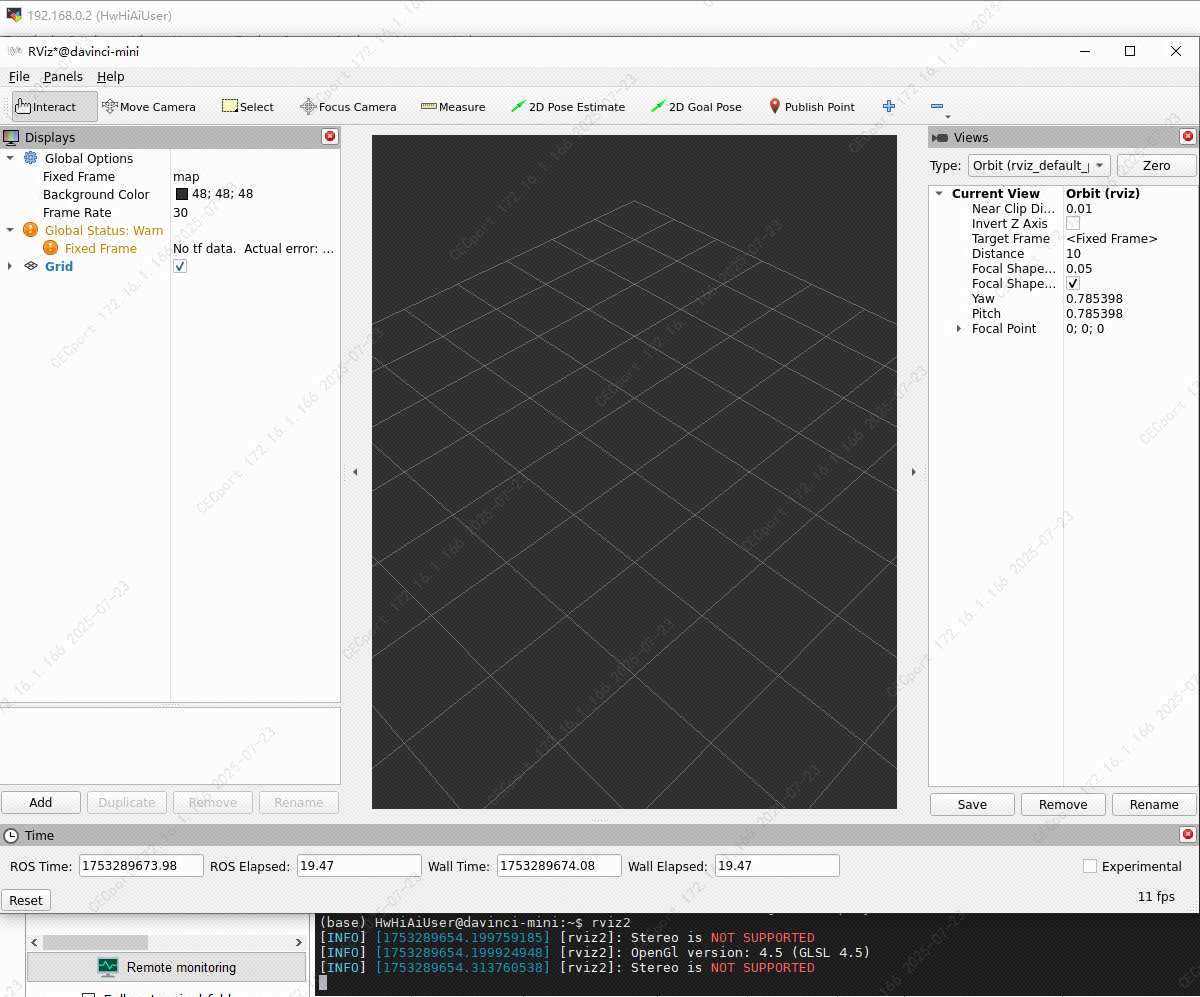
执行rviz2运行成功:



















 5223
5223

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











