






 本文介绍了一种使用Matlab实现的点云配准算法(ICP),详细阐述了通过kdtree搜索对应点集,利用奇异值分解求解旋转和平移参数,最终实现点云配准的过程。
本文介绍了一种使用Matlab实现的点云配准算法(ICP),详细阐述了通过kdtree搜索对应点集,利用奇异值分解求解旋转和平移参数,最终实现点云配准的过程。
概述
##最近在研究点云配准算法,发现用matlab来对点云进行处理比PCL更加方便,于是自己在matlab中实现了对点云配准算法(ICP)的实现,该方法首先通过kdtree来搜索创建对应点集,然后利用奇异值分解的方法求解旋转矩阵和平移矢量,最终将求得的齐次变换矩阵应用于待配准的点云,完成配准操作
代码实现
废话不多说直接上代码分享给大家:
// An highlighted block
function [P_registered,e1,e2]=icp(P,Q,max_iterations)
tic
NS = createns(Q,'NSMethod','kdtree');
j=0;
d=100;
n=size(P,1);
while d>0.0002
j=j+1;
fprintf("迭代次数:%d\n",j);
if j>max_iterations
break
end
%寻找Q的对应点集
[idx, ~] = knnsearch(NS,P,'k',1);
Qn= Q(idx,:);
%计算旋转矩阵R和平移矩阵t的最优解,使用svd方法
centerP=mean(P); %P点集的质心点
centerQn=mean(Qn); %对应点集的质心点
tempP=P-centerP; %进行去中心化
tempQn=Qn-centerQn;
H=tempP'*tempQn; %得到H矩阵
[U,~,V]=svd(H);
R=V*U';
% T=(centerP-centerMap)';
T=-R*centerP'+centerQn'; %利用质心点求解T参数
%使用R和T来得到新的点集
P=(R*P'+T)'; %使用转换参数得到新的点集P
d=sum(sum((P-Qn).^2,2))/n; %计算新的点集P到对应点的平均距离
e1=std(sum((P-Qn).^2,2));
e2=d;
end
P_registered = P;
toc
配准结果
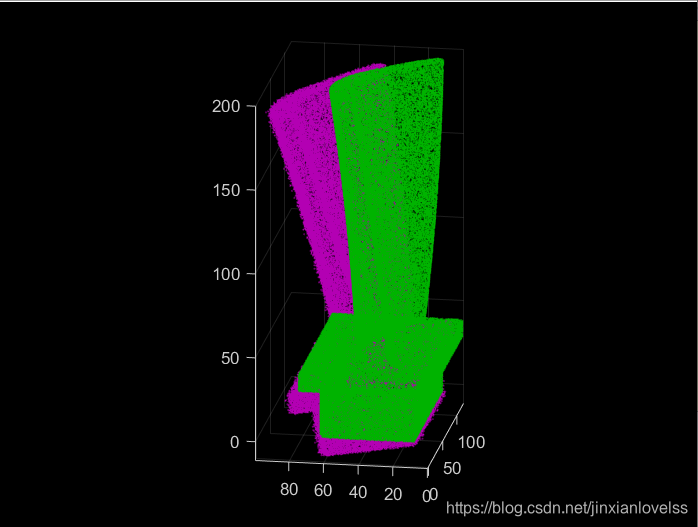
---------------------------1.配准前-------------------------
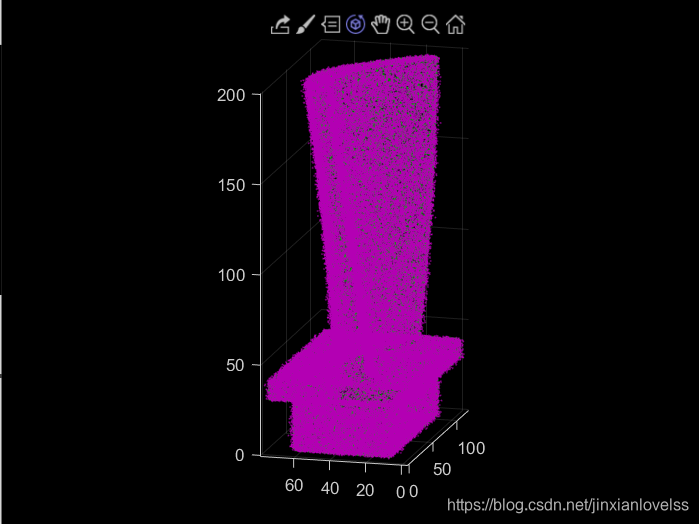
---------------------------2.配准后-------------------------


















 942
942

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









