






目录
一、 外极几何
多视图几何是利用在不同视点拍摄图像间的关系,研究照相机之间或特征之间关系的一门科学。图像通常的特征就是兴趣点,多视图几何中最重要的内容是双视图几何。
当有一个场景的两个视图以及视图中的对应图像点,那么根据照相机间的空间相对位置关系、照相机的性质以及三维场景点的位置,可以得到对这些图像点的一些几何关系约束。一般用外极几何来描述这些关系。
由于没有关于照相机的先验知识,会出现固有二义性,这是因为三维场景点X在经过4*4的单应性矩阵H变换后为HX,则HX在照相机里得到的图像点和X在照相机P里得到的图像点相同,利用照相机方程,可以描述为:
在分析双视图几何关系时,总是可以将照相机间的相对位置关系用单应性矩阵加以简化,这里的单应性矩阵通常只做刚体变换,一个比较好的做法是将原点和坐标轴与第一个照相机对齐:
和
是标定矩阵,R是第二个照相机的旋转矩阵,t是第二个照相机的平移向量。利用这些照相机参数矩阵,可以找到点X的投影点
的关系。
同一个图像点经过不同的投影矩阵产生的不同投影点必须满足:
F为:
为反对称矩阵:
由上面的公式,就可以借助F来恢复出照相机参数,而F可以从对应的投影图像点计算出来。在不知道照相机内参数的情况下,只能恢复照相机的投影变换矩阵。
度量重建就是能够在三维重建中正确的表示距离和角度。而在知道照相机内参数的情况下,重建就是基于度量的。

1.1 简单数据集
实验中使用的数据据是书中提供的牛津多视图数据集,可以从Visual Geometry Group - University of Oxford 中进行下载Merton数据集的压缩文件。解压后放入项目文件中即可。
实验代码:
from cam import Camera
from PIL import Image
from pylab import *
from numpy import *
# 载入图像
img1 = array(Image.open('D:\\picture\\images\\001.jpg'))
img2 = array(Image.open('D:\\picture\\images\\002.jpg'))
# 载入每个视图的二维点到列表中
points2D = [loadtxt('2D/00' + str(i+1) + '.corners').T for i in range(3)]
# 载入三维点
points3D = loadtxt('3D/p3d').T
# 载入对应
corr = genfromtxt('2D/nview-corners')
# 载入照相机矩阵到Camera对象列表中
P = [Camera(loadtxt('2D/00' + str(i+1) + '.P')) for i in range(3)]
X = vstack((points3D, ones(points3D.shape[1])))
x = P[0].project(X)
# 在视图1中绘制点
figure()
imshow(img1)
plot(points2D[0][0], points2D[0][1], '*')
axis('off')
figure()
imshow(img1)
plot(x[0], x[1], 'r.')
axis('off')
show()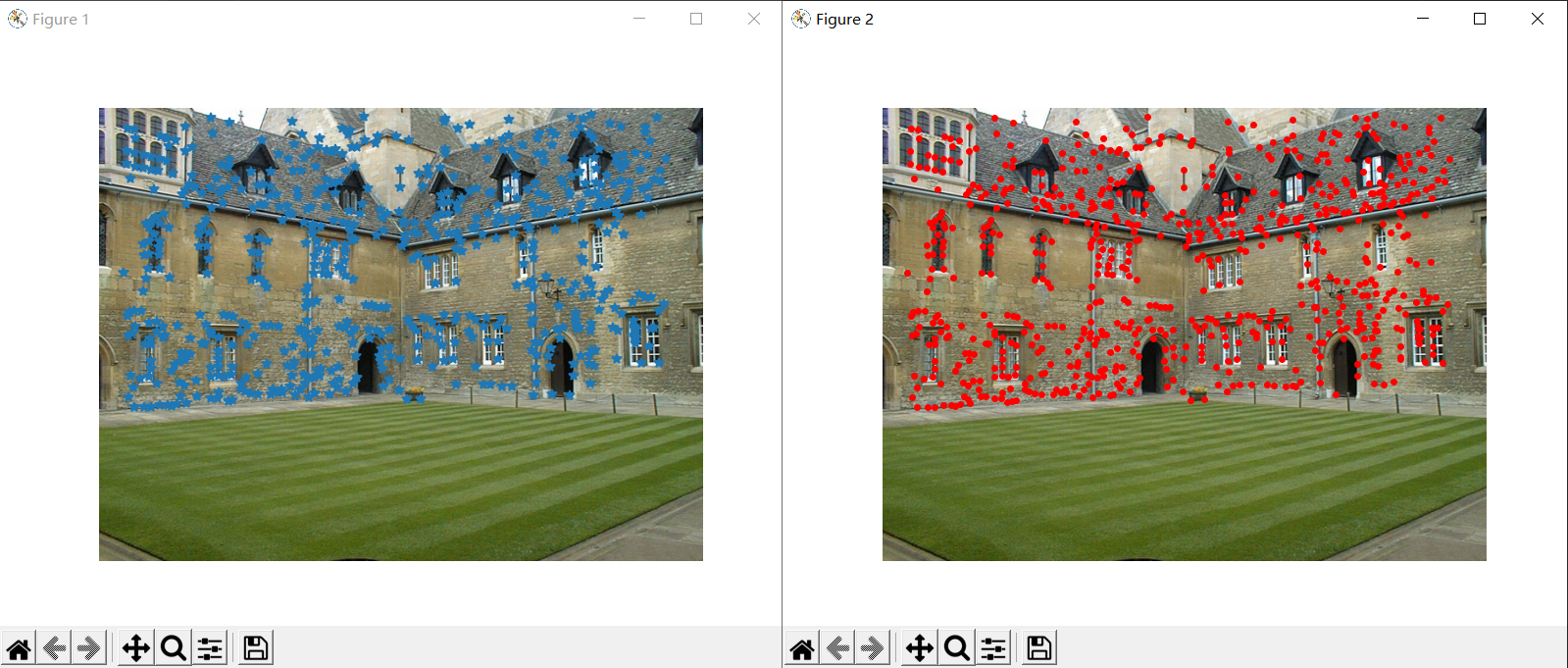
在按照书中的代码进行操作时,出现了错误:

这里需要将
# 载入对应
corr = genfromtxt('2D/nview-corners', dtype='int', missing='*')改成:
# 载入对应
corr = genfromtxt('2D/nview-corners')这时运行就不会报错了,并能成功运行。
分析:上述代码主要功能是绘制出第一个视图以及该视图中的图像点,并将投影后的点绘制在另一张图上,我们可以看到第二幅图像中的点比第一幅要多一些,这些多出来的点来源于视图2和视图3的重建。
1.2 用Matplotlib绘制三维数据
为了可视化三维重建的结果,就需要绘制出三维图像,可以使用Matplotlib中的mplot3d工具包实现这个目的,这个工具包可以绘制出三维点、线、等轮廓线、表面以及其他的基本图形组件,同时还可以通过图像窗口控件实现三维旋转和缩放。
from mpl_toolkits.mplot3d import axes3d
from PIL import Image
from pylab import *
from numpy import *
fig = figure()
ax = fig.gca(projection='3d')
# 生成三维样本点
X,Y,Z = axes3d.get_test_data(0.25)
# 在三维中绘制点
ax.plot(X.flatten(), Y.flatten(), Z.flatten(), 'o')
show()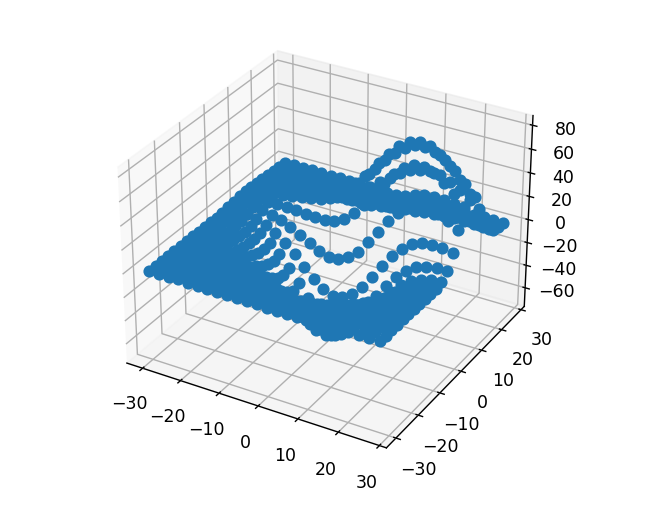
get_teat_data()函数在x,y空间按照设定的空间间隔参数来产生三列数据点,接着将其输入plot()函数,这样就可以在立体表面上画出三维点。
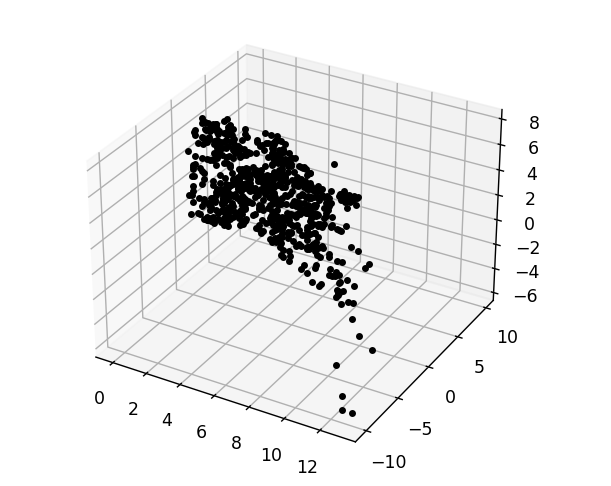
还可以通过画出上一节中Merton数据集样本数据观察三维点的效果
from mpl_toolkits.mplot3d import axes3d
from PIL import Image
from pylab import *
from numpy import *
from cam import Camera
# 载入图像
img1 = array(Image.open('D:\\picture\\images\\001.jpg'))
img2 = array(Image.open('D:\\picture\\images\\002.jpg'))
# 载入每个视图的二维点到列表中
points2D = [loadtxt('2D/00' + str(i+1) + '.corners').T for i in range(3)]
# 载入三维点
points3D = loadtxt('3D/p3d').T
# 载入对应
corr = genfromtxt('2D/nview-corners')
fig = figure()
ax = fig.gca(projection='3d')
ax.plot(points3D[0], points3D[1], points3D[2], 'k.')
show()得到了以下的视图。
1.3 计算F:八点法
八点法是通过计算对应点来计算基础矩阵的算法。
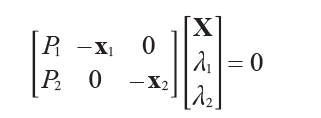
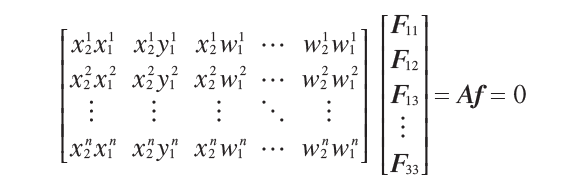
我们可以用线性系统的形式描述外极约束:
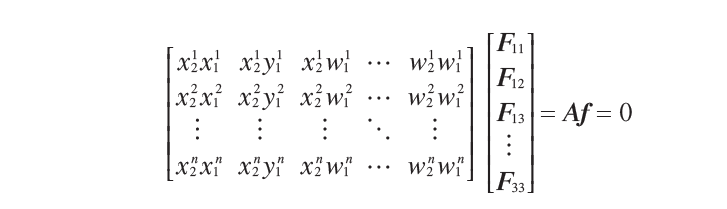
f包含F的元素,是一对图像点,共有n对对应点。基础矩阵中有9个元素,因其尺度是任意的,故只需8个方程,用8个对应点计算基础矩阵F,就将其称为八点法。
用python表示八点法中最小化的函数:
def compute_fundamental(x1,x2):
""" 使用归一化的八点算法,从对应点(x1,x2,x3...)中计算基础矩阵,每一行由如下构成
[x'*x, x'*y, x', y'*x, y'*y, y', x, y, 1] """
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建方程对应的矩阵
A = zeros((n,9))
for i in range(n):
A[i] = [x1[0,i]*x2[0,i], x1[0,i]*x2[1,i], x1[0,i]*x2[2,i],
x1[1,i]*x2[0,i], x1[1,i]*x2[1,i], x1[1,i]*x2[2,i],
x1[2,i]*x2[0,i], x1[2,i]*x2[1,i], x1[2,i]*x2[2,i] ]
# 计算线性最小二乘解
U,S,V = linalg.svd(A)
F = V[-1].reshape(3,3)
# 受限 F
# 通过将最后一个奇异置0,使得矩阵的秩为2
U,S,V = linalg.svd(F)
S[2] = 0
F = dot(U,dot(diag(S),V))
return F/F[2,2]SVD算法用于计算最小二乘解,因为上述算法的解可能到的秩并不为2,因此我们就通过将最后一个奇异值置0来得到秩最接近2的基础矩阵。 当然这里还缺少一步对图像坐标的归一化,接下来的学习中会进一步讨论。
1.4 外极点和外极线
外极点满足条件,故可以从计算F的零空间得到,具体算法如下:
def compute_epipole(F):
""" Computes the (right) epipole from a
fundamental matrix F.
(Use with F.T for left epipole.) """
# return null space of F (Fx=0)
U,S,V = linalg.svd(F)
e = V[-1]
return e/e[2]接下来就是利用之前的样本数据集的前两个视图进行实验:
from PIL import Image
from pylab import *
from numpy import *
from PCV.geometry import sfm
# 载入图像
img1 = array(Image.open('D:\\picture\\images\\001.jpg'))
img2 = array(Image.open('D:\\picture\\images\\002.jpg'))
# 载入每个视图的二维点到列表中
points2D = [loadtxt('2D/00' + str(i+1) + '.corners').T for i in range(3)]
# 载入三维点
points3D = loadtxt('3D/p3d').T
# 载入对应
corr = genfromtxt('2D/nview-corners', dtype='int')
# 载入照相机矩阵到Camera对象列表中
ndx = (corr[:, 0] >= 0) & (corr[:, 1] >= 0)
# 获得坐标,并将其用齐次坐标表示
x1 = points2D[0][:, corr[ndx, 0]]
x1 = vstack((x1, ones(x1.shape[1])))
x2 = points2D[1][:, corr[ndx, 1]]
x2 = vstack((x2, ones(x2.shape[1])))
# 计算F
F = sfm.compute_fundamental(x1, x2)
# 计算极点
e = sfm.compute_epipole(F)
# 绘制图像
figure()
imshow(img1)
# 分别绘制每条线
for i in range(5):
sfm.plot_epipolar_line(img1, F, x2[:, i], e, False)
axis('off')
figure()
imshow(img2)
# 分别绘制每个点
for i in range(5):
plot(x2[0, i], x2[1, i], 'o')
axis('off')
show()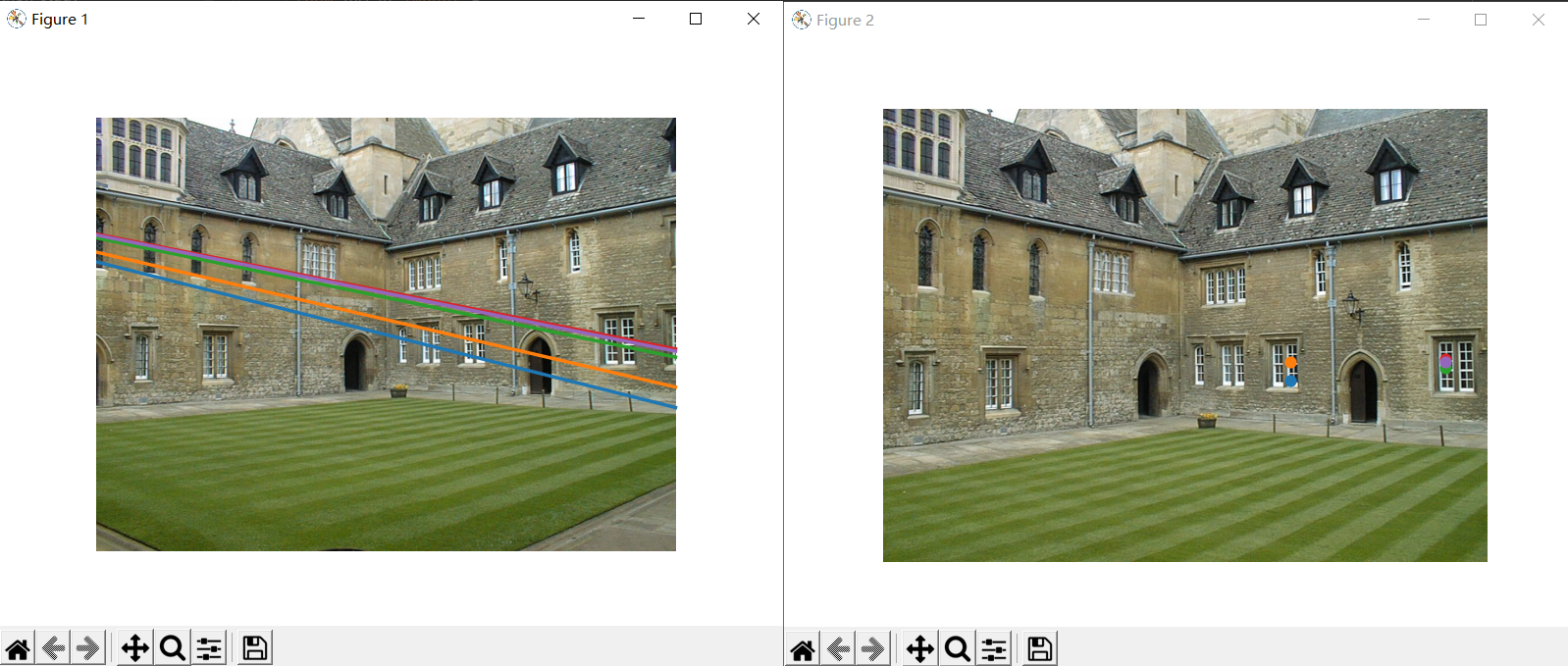
选择两幅图像的对应点,并将其转换为齐次坐标,对应点是从文本文件中读取到的。 代码中用到了plot_epipolar_line()函数,用于绘制外极点和外极线:
def plot_epipolar_line(im,F,x,epipole=None,show_epipole=True):
m,n = im.shape[:2]
line = dot(F,x)
# 外极线的值和参数
t = linspace(0,n,100)
lt = array([(line[2]+line[0]*tt)/(-line[1]) for tt in t])
# 仅仅处理位于图像内部的点和线
ndx = (lt>=0) & (lt<m)
plot(t[ndx],lt[ndx],linewidth=2)
if show_epipole:
if epipole is None:
epipole = compute_epipole(F)
plot(epipole[0]/epipole[2],epipole[1]/epipole[2],'r*')将x轴的范围作为直线的参数,当直线超出图像边界时,超出的部分就会被截断。当show_epipole为真时,外极点也会被化出来。
二、照相机和三维结构的计算
2.1 三角部分
通过给定照相机参数模型,图像点就可以通过三角剖分来恢复出这些点的三维位置。对于两个照相机的视图,三维实物点X的投影点为
,照相机方程就为:
由于图像噪声、照相机的参数误差和其他系统误差,可能导致方程无精确解,因此可以通过SVD算法得到三维点的最小二乘估值。下面就给出计算一个点对的最小二乘三角剖分的python算法:
def triangulate_point(x1,x2,P1,P2):
""" 使用最小二乘解,绘制点对的三角剖分 """
M = zeros((6,6))
M[:3,:4] = P1
M[3:,:4] = P2
M[:3,4] = -x1
M[3:,5] = -x2
U,S,V = linalg.svd(M)
X = V[-1,:4]
return X / X[3]多个点的三角剖分可以通过:
def triangulate(x1,x2,P1,P2):
""" x1,x2中点的二视图的三角剖分 """
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
X = [ triangulate_point(x1[:,i],x2[:,i],P1,P2) for i in range(n)]
return array(X).T
三角剖分的实验:
from PCV.geometry import sfm
from PIL import Image
from pylab import *
from numpy import *
from cam import Camera
from mpl_toolkits.mplot3d import axes3d
# 载入图像
img1 = array(Image.open('D:\\picture\\images\\001.jpg'))
img2 = array(Image.open('D:\\picture\\images\\002.jpg'))
# 载入每个视图的二维点到列表中
points2D = [loadtxt('2D/00' + str(i+1) + '.corners').T for i in range(3)]
# 载入三维点
points3D = loadtxt('3D/p3d').T
# 载入对应
corr = genfromtxt('2D/nview-corners', dtype='int')
# 载入照相机矩阵到Camera对象列表中
P = [Camera(loadtxt('2D/00' + str(i+1) + '.P')) for i in range(3)]
ndx = (corr[:, 0] >= 0) & (corr[:, 1] >= 0)
x1 = points2D[0][:, corr[ndx, 0]]
x1 = vstack((x1, ones(x1.shape[1])))
x2 = points2D[1][:, corr[ndx, 1]]
x2 = vstack((x2, ones(x2.shape[1])))
Xture = points3D[:,ndx]
Xture = vstack((Xture,ones(Xture.shape[1])))
# 检查前三个点
Xest = sfm.triangulate(x1,x2,P[0].P,P[1].P)
print(Xest[:,:3])
print(Xture[:,:3])
# 绘制图像
fig = figure()
ax = fig.gca(projection='3d')
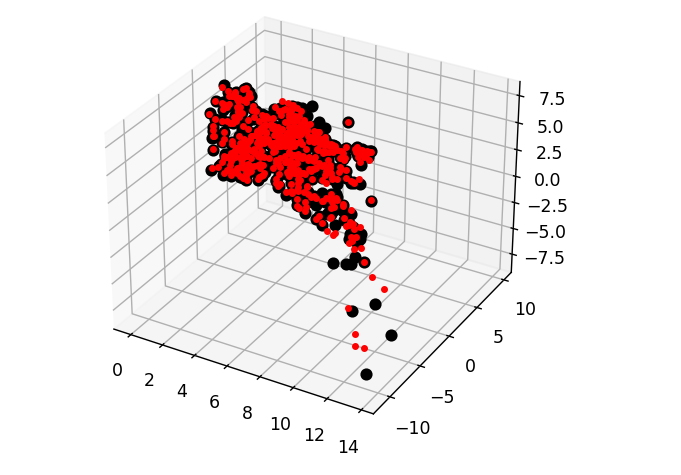
ax.plot(Xest[0],Xest[1],Xest[2],'ko')
ax.plot(Xture[0],Xture[1],Xture[2],'r.')
axis('auto')
show()控制台得出结果,可以看出算法估计的三维图像点与实际图像点很接近。
2.2 由三维点计算照相机矩阵
直接线性变换的方法可以计算照相机矩阵P,本质上,这是三角剖分方法的逆问题,我们也将其称为照相机反切法。同样可以利用这个方法恢复照相机矩阵。
通过前面的学习已经得知,三维点按照
,投影到点
,则相应点满足的关系是:
是矩阵P的三行,用python代码可以表示为:
def compute_P(x,X):
""" 由二维三维对对应计算照相机矩阵 """
n = x.shape[1]
if X.shape[1] != n:
raise ValueError("Number of points don't match.")
# create matrix for DLT solution
M = zeros((3*n,12+n))
for i in range(n):
M[3*i,0:4] = X[:,i]
M[3*i+1,4:8] = X[:,i]
M[3*i+2,8:12] = X[:,i]
M[3*i:3*i+3,i+12] = -x[:,i]
U,S,V = linalg.svd(M)
return V[-1,:12].reshape((3,4))
该函数的输入参数为图像点和三维点,构造出上述所示的M矩阵,最后一个特征向量的前12个元素是照相机矩阵的元素,经过重新排列成矩阵形状后返回。
测试算法性能:
from cam import Camera
from PIL import Image
from pylab import *
from numpy import *
from PCV.geometry import sfm
img1 = array(Image.open('D:\\picture\\images\\001.jpg'))
img2 = array(Image.open('D:\\picture\\images\\002.jpg'))
# 载入每个视图的二维点到列表中
points2D = [loadtxt('2D/00' + str(i+1) + '.corners').T for i in range(3)]
# 载入三维点
points3D = loadtxt('3D/p3d').T
# 载入对应
corr = genfromtxt('2D/nview-corners', dtype='int')
# 载入照相机矩阵到Camera对象列表中
P = [Camera(loadtxt('2D/00' + str(i+1) + '.P')) for i in range(3)]
corr = corr[:, 0] # 视图1
ndx3D = where(corr >= 0)[0]
ndx2D = corr[ndx3D]
# 选取可见点并用齐次坐标表示
x = points2D[0][:, ndx2D]
x = vstack((x, ones(x.shape[1])))
X = points3D[:, ndx3D]
X = vstack((X, ones(X.shape[1])))
# 估计P
Pest = Camera(sfm.compute_P(x, X))
# 比较
print(Pest.P/Pest.P[2,3])
print(P[0].P/P[0].P[2,3])
xest = Pest.project(X)
# 绘制图像
figure()
imshow(img1)
plot(x[0],x[1],'bo')
plot(xest[0],xest[1],'r.')
axis('off')
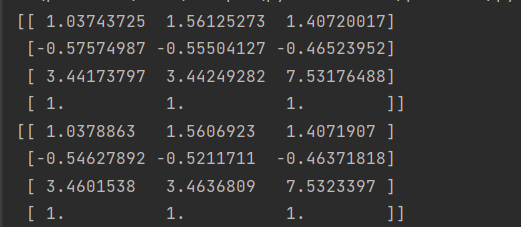
show()将归一化格式打印控制台:
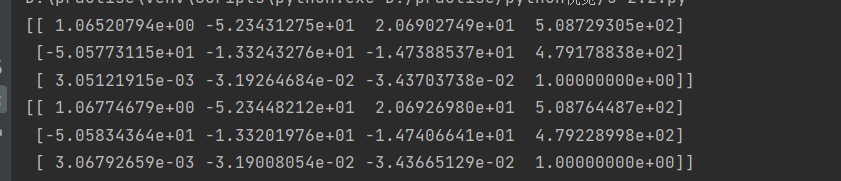
观察两组数据可以看出,估计得到的照相机矩阵与计算得出的照相机矩阵几乎一致。
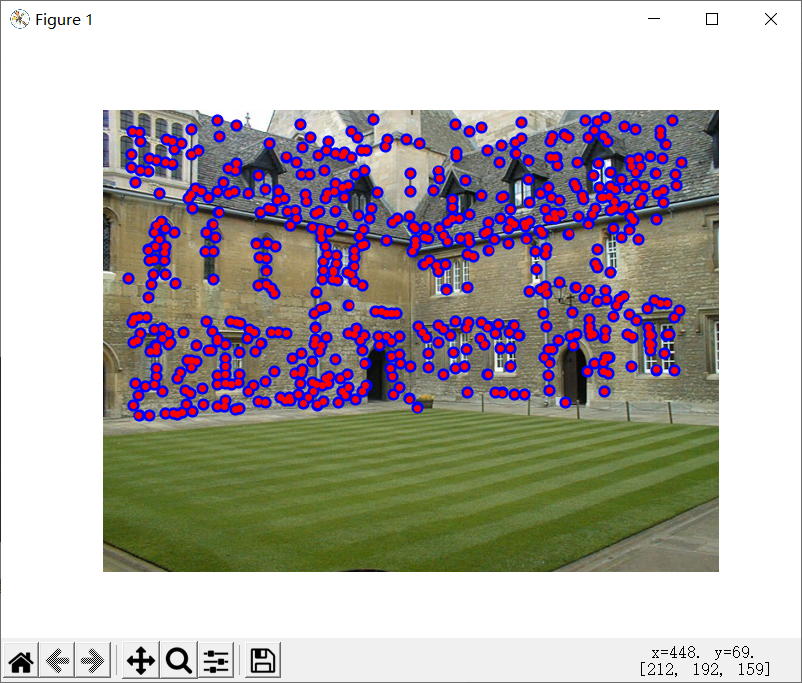
使用估计得出的照相机矩阵投影三维点,绘制出结果:
2.3 由基础矩阵计算照相机矩阵
研究分为两类:未标定的情况和已标定的情况
1、未被标定的情况——投影重建
当没有照相机内参数知识的时候,照相机矩阵就只能通过射影变换恢复出来了,一个简单的方法就是:
e为左极点,满足。不过引用该矩阵时,三角形剖分很有可能会发生畸变,类似倾斜的重建之类的。
python代码为:
def compute_P_from_fundamental(F):
""" 从基础矩阵中计算第二个照相机矩阵(假设P1 = [I 0]) """
e = compute_epipole(F.T) # left epipole
Te = skew(e)
return vstack((dot(Te,F.T).T,e)).T使用到的skew()函数定义为:
def skew(a):
""" 反对称矩阵A,使得对于每个v有a*v = Av """
return array([[0,-a[2],a[1]],[a[2],0,-a[0]],[-a[1],a[0],0]])2、已标定的情况——度量重建
在已标定的情况下,重建会保持欧式空间的一些度量特性,给定标定矩阵K,将其逆矩阵作用于图像点
,在新的图像坐标系下,方程变为
当然点同样也满足之前的基础方程:
标定归一化的坐标系下,基础矩阵又称为本质矩阵,一般将标定后的矩阵记为E。
从本质矩阵恢复出来的照相机矩阵中存在度量关系,但有四个可能的解,且只有一个解产生位于两个照相机前的场景。
计算这四个解的算法为:
def compute_P_from_essential(E):
""" 从本质矩阵中计算第二个照相机的矩阵,输出为可能的4个照相机矩阵列表 """
# 确保E的秩为2
U,S,V = svd(E)
if det(dot(U,V))<0:
V = -V
E = dot(U,dot(diag([1,1,0]),V))
# 创建矩阵
Z = skew([0,0,-1])
W = array([[0,-1,0],[1,0,0],[0,0,1]])
# 返回所有的4个解
P2 = [vstack((dot(U,dot(W,V)).T,U[:,2])).T,
vstack((dot(U,dot(W,V)).T,-U[:,2])).T,
vstack((dot(U,dot(W.T,V)).T,U[:,2])).T,
vstack((dot(U,dot(W.T,V)).T,-U[:,2])).T]
return P2函数要确保本质矩阵的秩为2。
三、多视图重建
利用上述理论从多福图像中计算出真实的三维重建,假设照相机已经标定,计算重建可以分为4个步骤:
1、检测特征点,然后于两幅图像中进行匹配;
2、根据匹配计算基础矩阵
3、由基础矩阵计算照相机矩阵;
4、三角剖分三维点
3.1 稳健估计基础矩阵
当存在噪声和不正确的匹配时,需要估计基础矩阵,这里使用RANSAC方法,并结合八点算法。需要注意的是八点算法在平面场景就会失效,因此当场景点在平面上是该算法不能使用。
class RansacModel(object):
""" 可用先前章节中学习的ransac算法计算基础矩阵的类 """
def __init__(self,debug=False):
self.debug = debug
def fit(self,data):
""" 使用选择的8个对应计算基础矩阵 """
# 转置,并将数据分成两个点集
data = data.T
x1 = data[:3,:8]
x2 = data[3:,:8]
# 估计基础矩阵,并返回
F = compute_fundamental_normalized(x1,x2)
return F
def get_error(self,data,F):
""" 计算所有对应的x^T F x,并返回每个变换点的误差 """
# 转置,并将数据分成两个点集
data = data.T
x1 = data[:3]
x2 = data[3:]
# 将Sampson距离用作误差度量
Fx1 = dot(F,x1)
Fx2 = dot(F,x2)
denom = Fx1[0]**2 + Fx1[1]**2 + Fx2[0]**2 + Fx2[1]**2
err = ( diag(dot(x1.T,dot(F,x2))) )**2 / denom
# 返回每个点的误差
return err使用fit()和get_error()方法,采用的错误衡量方法是Sampson距离。fit()方法会选择8个点,然后使用归一化的八点算法:
def compute_fundamental_normalized(x1,x2):
""" 使用归一化的八点算法,由对应点(x1,x2 3*n的数组)计算基础矩阵 """
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# 归一化图像坐标
x1 = x1 / x1[2]
mean_1 = mean(x1[:2],axis=1)
S1 = sqrt(2) / std(x1[:2])
T1 = array([[S1,0,-S1*mean_1[0]],[0,S1,-S1*mean_1[1]],[0,0,1]])
x1 = dot(T1,x1)
x2 = x2 / x2[2]
mean_2 = mean(x2[:2],axis=1)
S2 = sqrt(2) / std(x2[:2])
T2 = array([[S2,0,-S2*mean_2[0]],[0,S2,-S2*mean_2[1]],[0,0,1]])
x2 = dot(T2,x2)
# 使用归一化的坐标计算F
F = compute_fundamental(x1,x2)
# 反归一化
F = dot(T1.T,dot(F,T2))
return F/F[2,2]上述函数将图像点归一化为零均值固定方差。接下来就是要知道哪些匹配和F矩阵是一致的了,这里就将上面的类使用在函数中:
def F_from_ransac(x1,x2,model,maxiter=5000,match_theshold=1e-6):
""" 使用RANSAC方法从点对应中稳健地估计基础矩阵F,输入:使用齐次坐标表示的点x1,x2 """
import ransac02
data = vstack((x1,x2))
# 计算F,并返回正确索引点
F,ransac_data = ransac02.ransac(data.T,model,8,maxiter,match_theshold,20,return_all=True)
return F, ransac_data['inliers']返回最佳基础矩阵F,以及正确的索引。
3.2 三维重建
进行三维重建时,首先需要先进行特征的提取与匹配,之后进行基础矩阵和照相机矩阵的估计,在获得标定矩阵后对矩阵K进行硬编码,在挑选属于匹配关系的特定点后使用进行归一化,并使用归一化的八点算法进行RANSAC估计,得到本质矩阵,从本质矩阵除法计算出第二个照相机矩阵的四个可能解。
from pylab import *
from numpy import *
from PIL import Image
from cam import Camera
from PCV.geometry import sfm, homography
from PCV.localdescriptors import sift
from mpl_toolkits.mplot3d import axes3d
# 标定矩阵
K = array([[2394,0,932],[0,2398,628],[0,0,1]])
# 载入图像,并计算特征
img1 = array(Image.open('D:\\picture\\images\\001.jpg'))
sift.process_image('D:\\picture\\images\\001.jpg', 'img1.sift')
l1,d1 = sift.read_features_from_file('img1.sift')
img2 = array(Image.open('D:\\picture\\images\\002.jpg'))
sift.process_image('D:\\picture\\images\\002.jpg', 'img2.sift')
l2,d2 = sift.read_features_from_file('img2.sift')
# 匹配特征
matches = sift.match_twosided(d1,d2)
ndx = matches.nonzero()[0]
# 使用齐次坐标表示,并使用inv(K)归一化
x1 = homography.make_homog(l1[ndx,:2].T)
ndx2 = [int(matches[i]) for i in ndx]
x2 = homography.make_homog(l2[ndx2,:2].T)
x1n = dot(inv(K),x1)
x2n = dot(inv(K),x2)
# 使用RANSAC方法估计E
model = sfm.RansacModel()
E,inliers = sfm.F_from_ransac(x1n,x2n,model)
# 计算照相机矩阵
P1 = array([[1,0,0,0],[0,1,0,0],[0,0,1,0]])
P2 = sfm.compute_P_from_essential(E)对4个解进行循环遍历,对对应于正确点的三维点进行三角剖分,并将三角剖分后的图像投影回图像后,深度的符号由每个图像点的第三个数值给出。
# 选取点在照相机前的解
ind = 0
maxres = 0
for i in range(4):
# 三角剖分正确点,并计算每个照相机的深度
X = sfm.triangulate(x1n[:,inliers],x2n[:,inliers],P1,P2[i])
d1 = dot(P1,X)[2]
d2 = dot(P2[i],X)[2]
if sum(d1 > 0) + sum(d2 > 0) > maxres:
maxres = sum(d1>0)+sum(d2>0)
ind = i
infront = (d1>0)&(d2>0)
# 三角剖分正确点,并移除不在所有照相机面前的点
X = sfm.triangulate(x1n[:,inliers],x2n[:,inliers],P1, P2[ind])
X = X[:, infront]绘制图像
# 绘制三维图像
fig = figure()
ax = fig.gca(projection='3d')
ax.plot(-X[0],X[1],X[2],'k.')
axis('off')
# 绘制三维点
cam1 = Camera(P1)
cam2 = Camera(P2[ind])
x1p = cam1.project(X)
x2p = cam2.project(X)
x1p = dot(K,x1p)
x2p = dot(K,x2p)
figure()
imshow(img1)
gray()
plot(x1p[0],x1p[1],'o')
plot(x1[0],x1[1],'r.')
axis('off')
figure()
imshow(img2)
gray()
plot(x2p[0],x2p[1],'o')
plot(x2[0],x2[1],'r.')
axis('off')
show()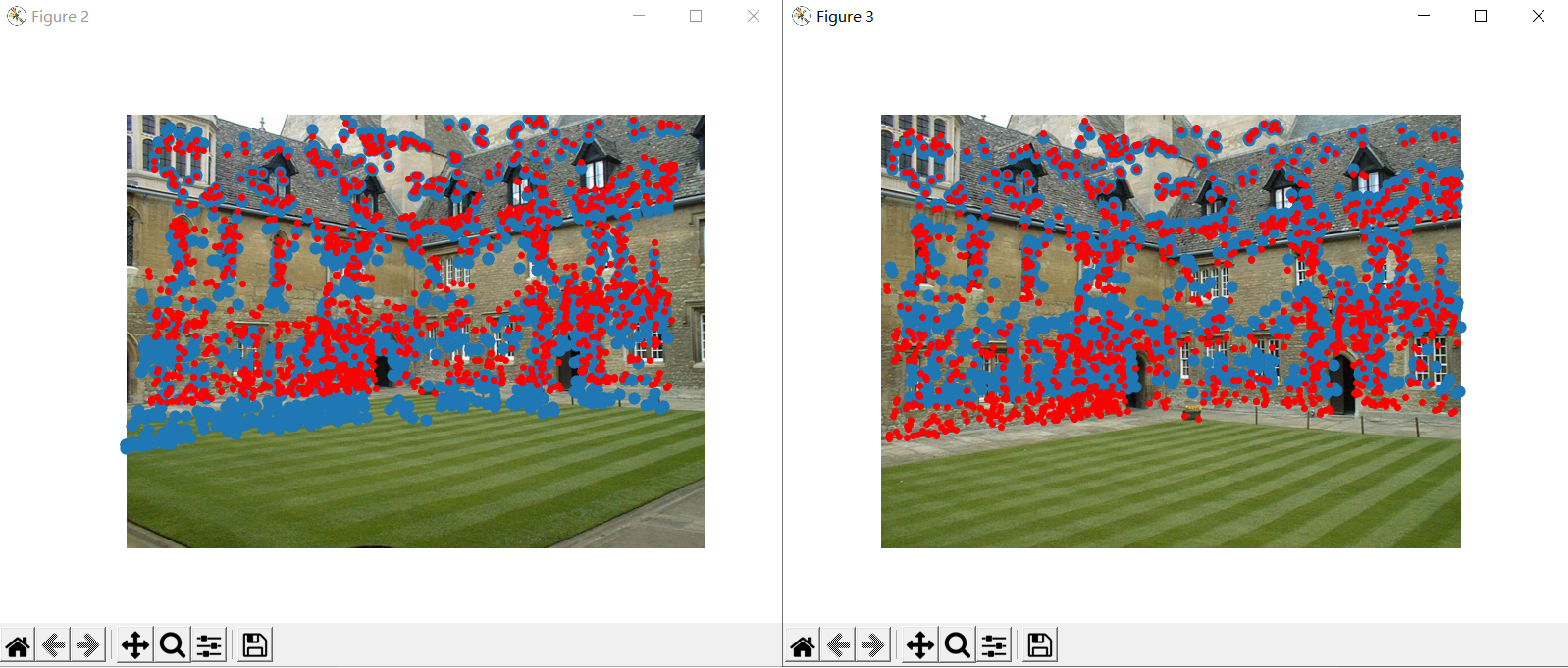
可以看到二次投影的点和原始特征位置不完全匹配,这个可以通过进一步调整照相机矩阵来提高重建和二次投影的性能。
3.3 多视图的拓展示例
多视图:
当我们有同一场景的多个视图时,三维重建会变得更准确,包括更多的细节信息。因为基础矩阵只和一对视图相关,所以该过程带有很多图像,和之前的处理有些不同。
对于视频序列,可以通过使用时序关系,在连续的帧中对中匹配特征。相对方位需要从每个帧对增量的加入下一个帧对。
对于静止图像,一个办法是找到一个中央参考视图,然后计算与之有关的所有其他照相机矩阵,另一个方法就是计算一个图像对的照相机矩阵和三维重建,然后增量的加入新的图像和三维点。
光束法平差:
从简单三维重建中可以看出,恢复出的点的位置和由估计的基础矩阵计算出的照相机矩阵都存在着误差,在多个视图的计算中这个误差就会进一步扩大。故多视图重建的最后一步是通过优化三维点位置和照相机的参数减少二次投影的误差。这就是光束法平差。
自标定:
在未标定照相机的情况下,可以从图像特征来计算标定矩阵,这个过程就被称为自标定。

















 2064
2064

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









