




 本文详细介绍了如何使用PCL处理点云数据,包括PCD文件的解读、点云库PCL的基础应用、PCL查看器的使用、激光雷达对象的创建与参数调整,以及关键概念如模板和不同类型点云的处理。通过实例演示,读者将掌握在实际项目中定位和障碍检测的技巧。
本文详细介绍了如何使用PCL处理点云数据,包括PCD文件的解读、点云库PCL的基础应用、PCL查看器的使用、激光雷达对象的创建与参数调整,以及关键概念如模板和不同类型点云的处理。通过实例演示,读者将掌握在实际项目中定位和障碍检测的技巧。
本文简要介绍点云库(PCL),一个用于处理2D和3D数据的开源库,如激光雷达点云。 通过熟悉使用PCL的一些基础知识,以便后续使用PCL进行定位。主要涵盖以下内容:
点云数据Point Cloud Data(PCD)文件
点云库The Point Cloud Library(PCL)
PCL查看器(Viewer)
在PCL中创建和使用激光雷达对象
模板Templates和不同的点云
调整激光雷达参数 检查PCL中的点云
一、点云数据(PCD)文件
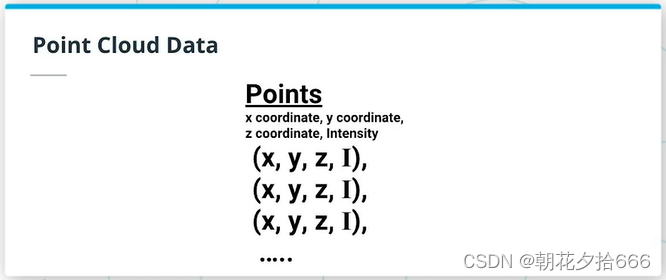
激光雷达数据的存储格式称为点云数据(PCD),pcd文件是笛卡尔坐标(x,y,z)和强度值i的列表,是在每一次扫描环境之后的单个快照。这意味着对于VLP 64激光雷达,pcd文件将有大约256,000 (x,y,z,i)值。
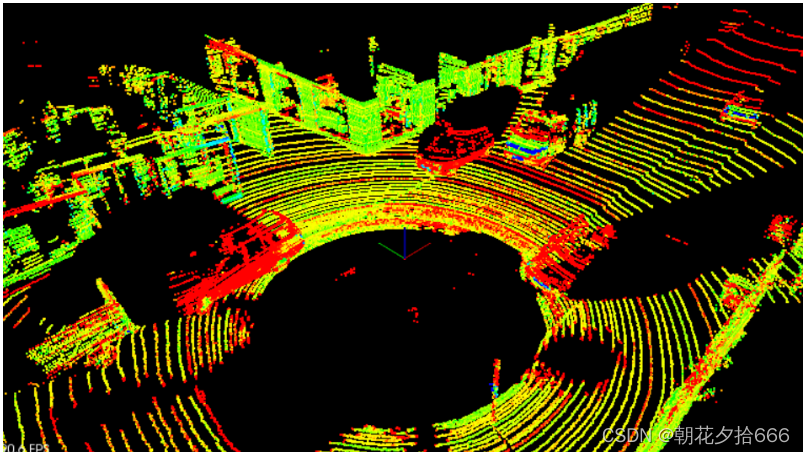
一个城市街区的PCD,停着的汽车,和一辆路过的货车。强度值以不同的颜色显示。中间黑色区域是装有激光雷达传感器的汽车所在的位置。
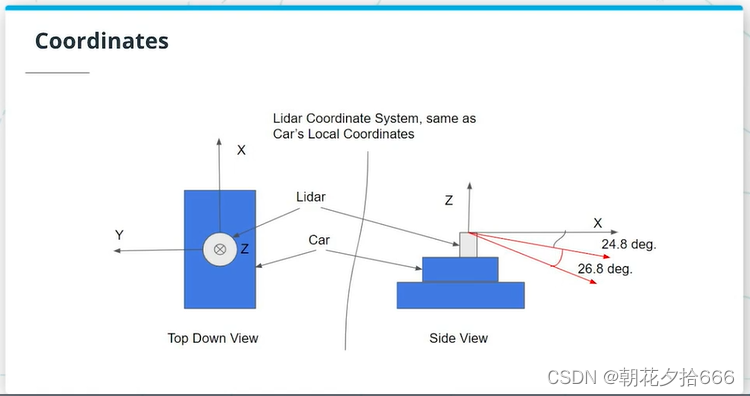
PCD坐标
点云数据的坐标系与汽车的本地坐标系相同。在这个坐标系中,x轴指向汽车的前部,y轴指向汽车的左侧。由于这个坐标系采用右手定则,坐标系z轴指向汽车上方。
二、点云库PCL
在本课中学习处理点云数据以发现障碍物。所有的代码都将在c++环境中完成,PCL是一个用于处理点云的开源c++库,使用它来可视化数据、呈现形状,以及一些内置处理功能。在这里可以找到PCL的一些文档:Point Cloud Library | The Point Cloud Library (PCL) is a standalone, large scale, open project for 2D/3D image and point cloud processing.

PCL在机器人社区中被广泛用于处理点云数据,网上有许多使用它的教程。PCL中有许多内置函数可以帮助检测障碍,如分割、提取和聚类。
三、启动代码
所有代码(以及关于障碍物检测方面的内容)都包含在GitHub存储库中,可以克隆repo,并参照README在电脑上运行。参考链接:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1547
1547

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









