







 本文介绍了将EfficientNetV1作为YOLOv8目标检测网络的主干,通过均衡缩放网络的深度、宽度和分辨率提升性能。详细阐述了EfficientNetV1的框架原理,并提供了核心代码和逐步教程,指导读者如何将该网络结构整合到YOLOv8中。
本文介绍了将EfficientNetV1作为YOLOv8目标检测网络的主干,通过均衡缩放网络的深度、宽度和分辨率提升性能。详细阐述了EfficientNetV1的框架原理,并提供了核心代码和逐步教程,指导读者如何将该网络结构整合到YOLOv8中。
一、本文介绍
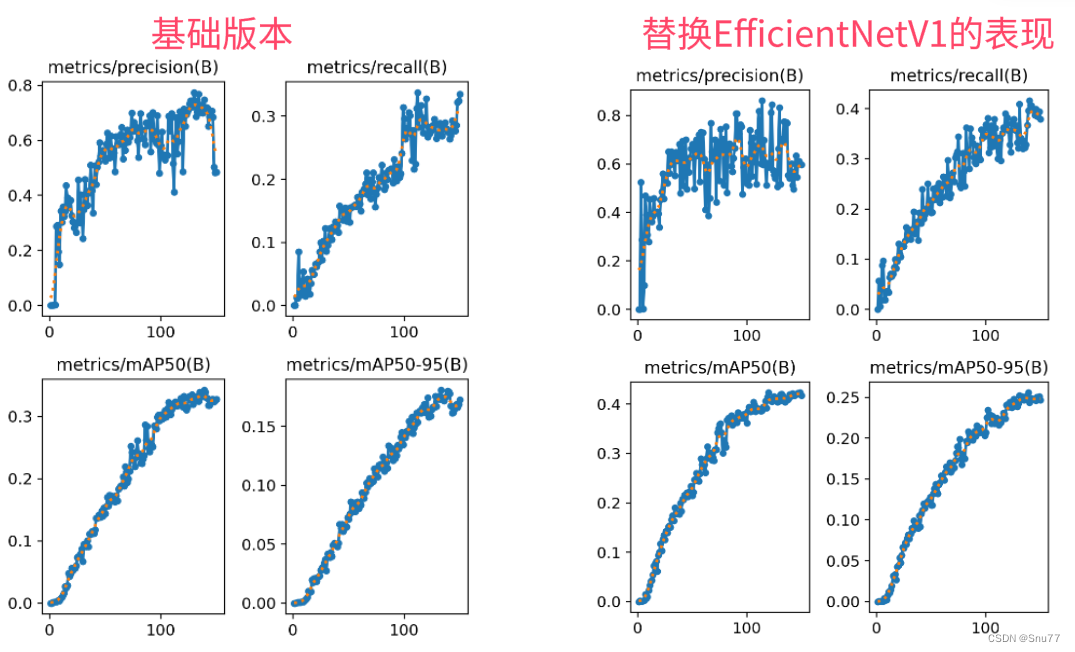
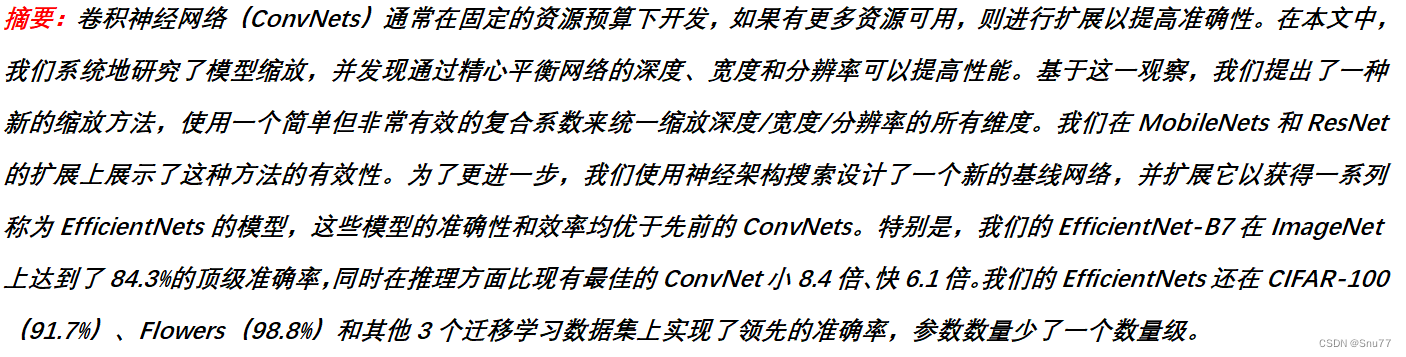
这次给大家带来的改进机制是EfficientNetV1主干,用其替换我们YOLOv8的特征提取网络,其主要思想是通过均衡地缩放网络的深度、宽度和分辨率,以提高卷积神经网络的性能。这种方法采用了一个简单但有效的复合系数,统一调整所有维度。经过我的实验该主干网络确实能够涨点在大中小三种物体检测上,同时该主干网络提供多种版本,大家可以在源代码中进行修改版本的使用。本文通过介绍其主要框架原理,然后教大家如何添加该网络结构到网络模型中。
推荐指数:⭐⭐⭐⭐⭐
涨点效果:⭐⭐⭐⭐⭐
目录
二、EfficientNetV1的框架原理

官方论文地址: 官方论文地址点击即可跳转
官方代码地址: 官方代码地址点击即可跳转

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 936
936




 到【灌水乐园】发言
到【灌水乐园】发言









