 BPR: 边界细化网络
BPR: 边界细化网络





 针对Mask R-CNN预测的mask边界粗糙问题,本文介绍了一种crop-and-refine策略。通过提取边界上的patch并利用Refinement Network优化,显著提高了mask分辨率与边界质量。
针对Mask R-CNN预测的mask边界粗糙问题,本文介绍了一种crop-and-refine策略。通过提取边界上的patch并利用Refinement Network优化,显著提高了mask分辨率与边界质量。
论文链接:https://arxiv.org/pdf/2104.05239.pdf
Motivation
CVPR21上一篇关于实例分割的文章。对于Mask RCNN来说,其最终得到的mask分辨率太低,因此还原到原尺寸的时候,一些boundary信息就显得非常粗糙,导致预测生成的mask效果不尽如人意。而且处于boundary的pixel本身数量相比于整张image来说很少,同时本身难以做分类。现有的一些方法试图提升boundary quality,但预测mask边界这个task本身的复杂度和segmentation很接近了,因此开销较大。
因此本文作者提出了一种crop-and-refine的策略。首先通过经典的实例分割网络(如Mask RCNN)得到coarse mask。随后在mask的boundary出提取出一系列的patch,随后将这些patch送入一个Refinement Network,这个Refinement Network负责做二分类的语义分割,进而对boundary处的patch进行优化,整个后处理的优化网络称为BPR(Boundary Patch Refinement)。该网络可以解决传统Mask RCNN预测的mask的边界粗糙的问题。
Framework
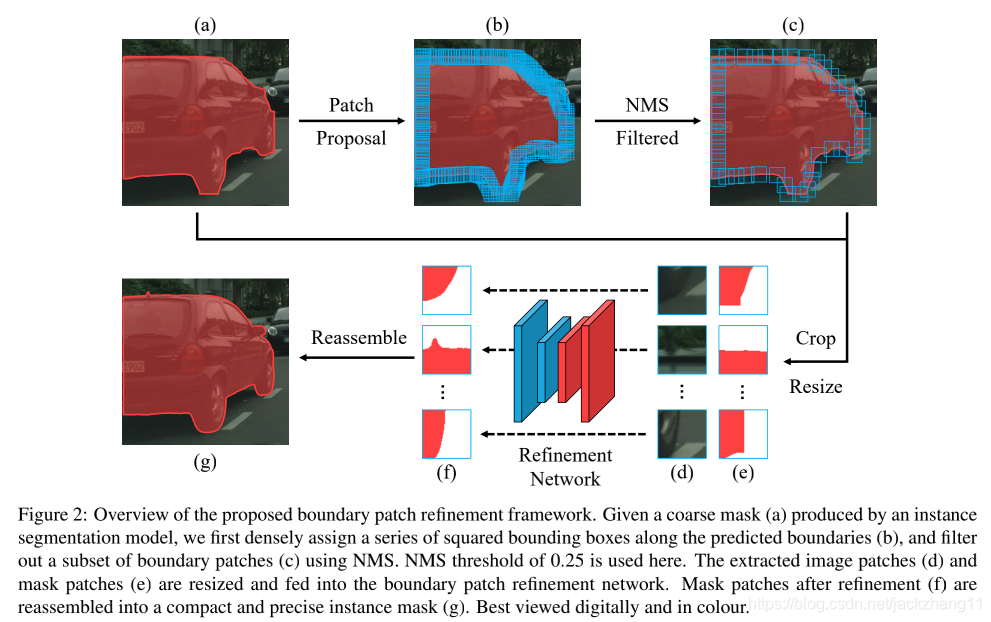
本文的核心就是在Mask RCNN一类的网络给出coarse mask后,如何设计Refine Network来对这个粗糙mask的边界进行优化,进而得到resolution更高,boundary quality更好的mask。
给定一个coarse mask(上图a),首先需要决定这个mask的哪些部分要做refine。这里作者提出了一种sliding-window式的方法提取到boundary处的一系列patch(上图b)。具体来说,就是在mask边界处密集assign正方形的bounding box,这些box内部囊括了boundary pixel。随后,由于这些box有的overlap太大导致redundant,这里采用NMS进行过滤(上图c),以实现速度和精度的trade-off。
随后这些survive下来的image patch(上图d)和mask patch(上图e)都resize到同一尺寸,一起喂入Refinement Network。这里作者argue说一定要喂入mask patch,因为一旦拥有mask patch的location和semantic信息,这个refinement network就不再需要学习instance-level semantic了。所以,refinement network只需要学习boundary处的hard pixel,并把它们正确分类。
关于Refinement Network,其任务是为每一个提取出来的boundary patch独立地做二分类语义分割,任何的语义分割模型都可以搬过来做这个task。输入的通道数为4(RGB+mask),输出通道数为2(BG or FG),这里作者采用了HRNetV2,这种各种level feature不断做融合的网络可以maintain高分辨率的representation。通过合理的增加input size,boundary batch就可以得到比之前方法更高的resolution。
在对每个patch独立地refine以后,需要将它们reassemble到coarse mask上面。有的相邻的patch可能存在overlap的情况,最终的结果是取平均,以0.5作为阈值判断某个pixel属于前景或是背景。
Experiment
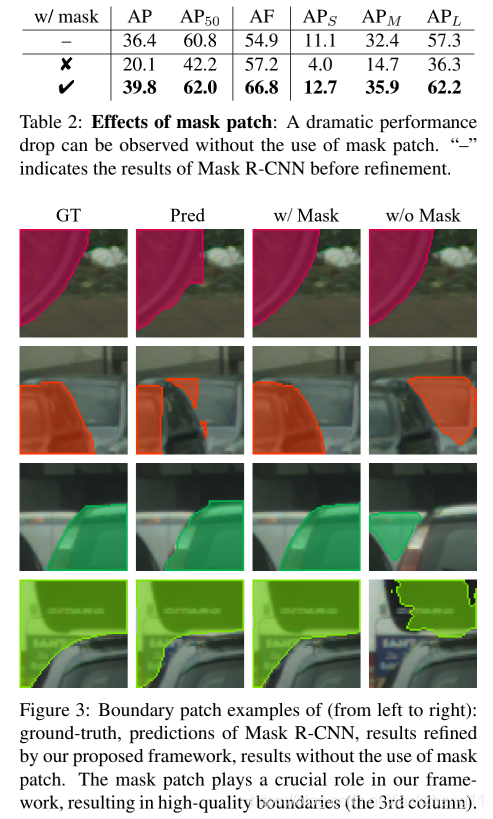
首先通过实验证明了将mask patch一并作为输入的重要性:
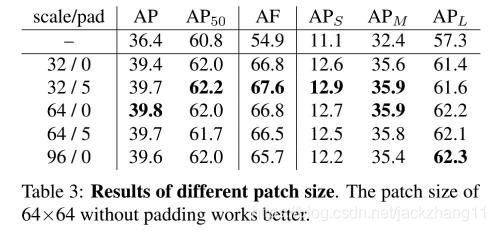
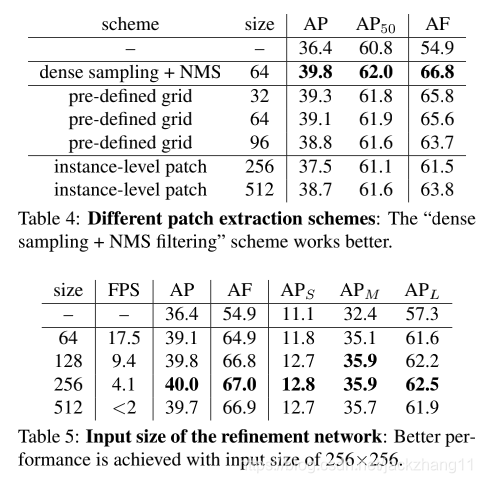
patch size、不同的patch extraction策略,input size对结果的影响:
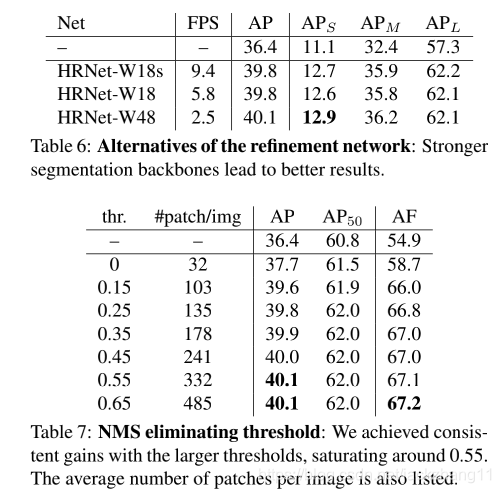
RefineNet的选取,NMS的阈值:
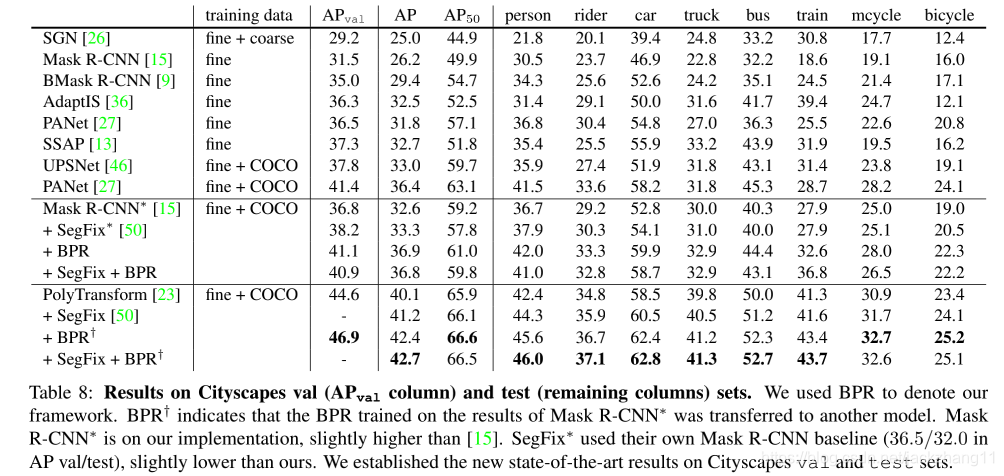
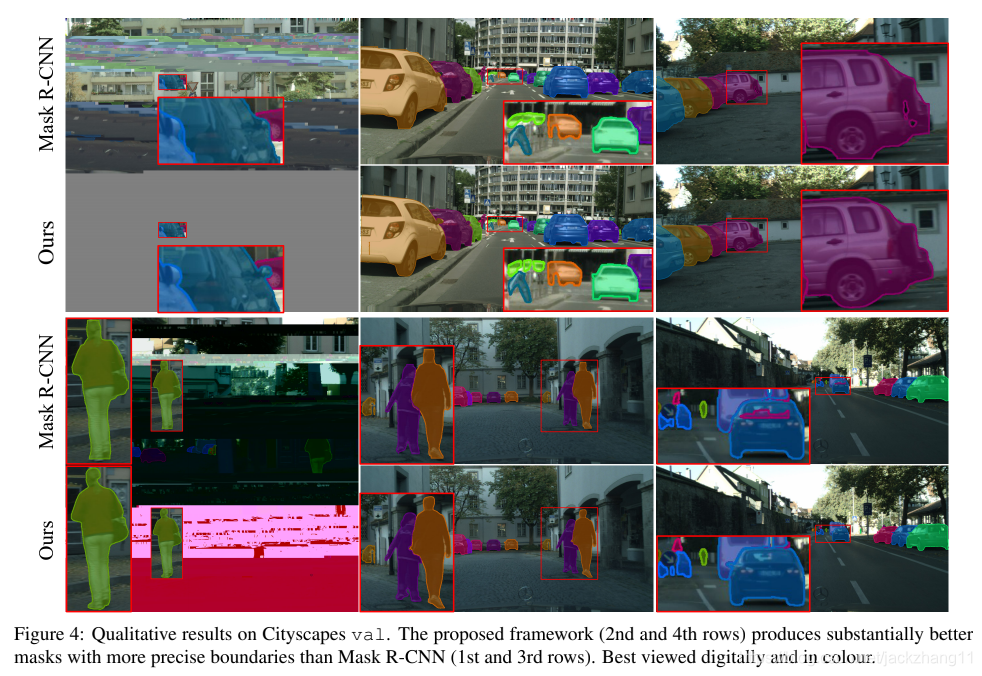
Cityscape上与其他方法的比较:
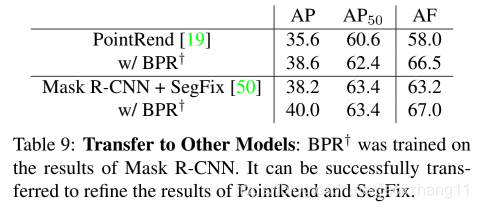
迁移到其他model上面的结果:
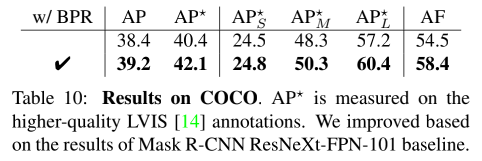
COCO数据集结果:


















 791
791

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









