




论文链接:https://arxiv.org/pdf/1909.13226.pdf
PolarMask是发表在CVPR20上的一篇文章,基于FCOS,把实例分割统一到了FCN的框架下。与Mask RCNN不同,PolarMask是通过寻找物体的counter进行建模,以得到实例的mask,如下图所示:
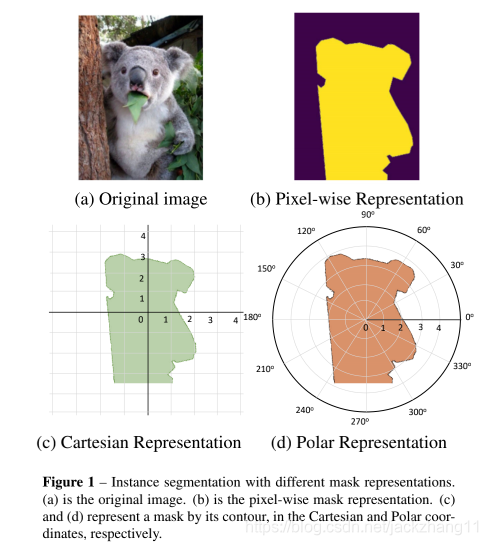
上图(a)为原图像;(b)为Mask RCNN一类的分割方法,在bbox中对每一个pixel进行分类;(c)为直角坐标系下的counter建模;(d)为极坐标系建模轮廓(即本文PolarMask的建模方式)。
其实(c)图直角坐标系的建模方式也是可行的,但是图(d)更加简单,因为极坐标系相较于直角坐标系拥有固定角度先验,因此模型在做回归的时候只需要回归特定角度下的距离即可,大大简化了问题的求解难度。这样实例分割问题就转化成了两个部分:即对实例的中心点进行分类,以及在极坐标系下的密集距离回归。整个pipeline以一张image作为输入,经过模型后得到实例中心点的类别,以及在各个方向上面的距离,最后将这些距离进行组装,得到最后的分割mask。
所以整个流程和FCOS一样简单,而且可以看作FCOS的拓展。因为FCOS只需要预测检测框,从而只需要预测四个方向的参数即可(l,r,t,b)——0,90,180,270度四个方向。PolarMask预测了36个角度的距离,从而得到实例的counter。因此FCOS属于PolarMask的一种特殊情况,也证明了实例分割的复杂性和目标检测相仿,并没有增加太多复杂度。
Architecture
PolarMask的网络结构如下图所示:
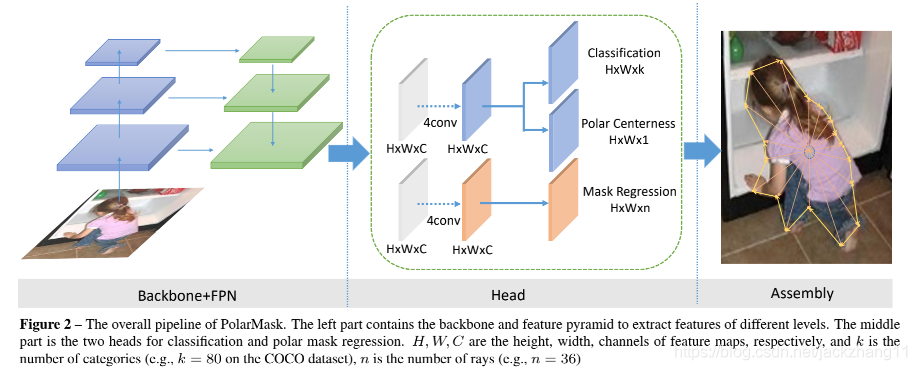
整体结构与FCOS
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4840
4840




 到【灌水乐园】发言
到【灌水乐园】发言







