



项目概述:WiFi控制的创新体验
在物联网技术飞速发展的今天,传统遥控小车早已无法满足创客们的探索欲望。本文将介绍一个基于ESP8266和MicroPython的WiFi遥控小车项目,通过两个ESP8266模块实现无线通信,让你摆脱传统遥控器的束缚,体验物联网控制的乐趣。
核心功能亮点
- WiFi无线控制:无需传统射频模块,通过WiFi网络实现远程操控
- 双ESP8266架构:一个作为车载接收端,一个作为手持遥控器发射端
- MicroPython编程:简化开发流程,支持快速迭代和功能扩展
- 模块化设计:电机驱动、电源管理、控制逻辑分层设计,易于维护
硬件选型与材料清单
核心组件解析
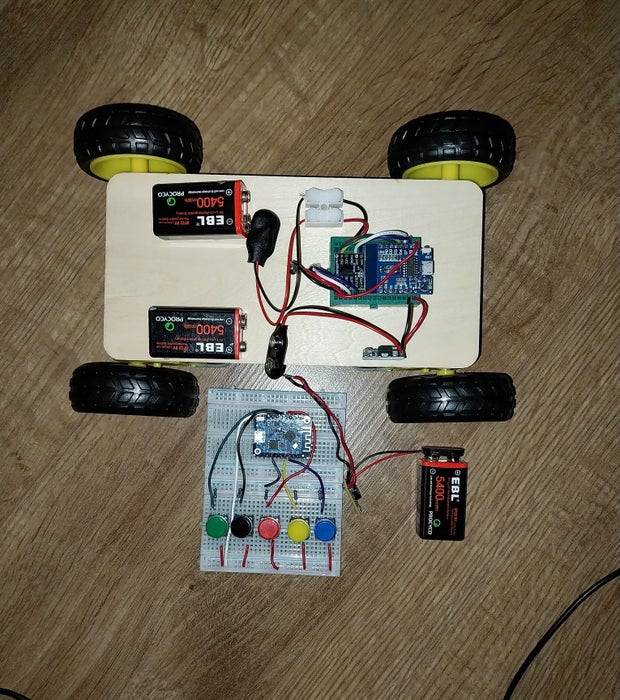
本项目采用ESP8266 Mini Node-MCU作为主控单元,其内置WiFi功能和足够的I/O接口,非常适合此类物联网控制项目。电机驱动选用DRV8833模块,支持两路直流电机控制,且兼容3.3V逻辑电平,完美匹配ESP8266的输出信号。

完整材料清单(分类展示)
| 模块类型 | 具体组件 | 数量 | 用途说明 |
|---|---|---|---|
| 主控系统 | ESP8266 Mini Node-MCU | 2块 | 分别作为车载端和遥控器端 |
| 动力系统 | 带塑料轮减速电机 | 4个 | 提供驱动力,转速适中 |
| 驱动模块 | DRV8833电机驱动 | 1个 | 控制电机正反转和转速 |
| 电源系统 | 9V电池 + 5V稳压模块 | 3套 | 提供稳定电源,保护电路 |
| 控制元件 | 彩色按钮开关 + 10K电阻 | 5个 | 遥控器输入控制 |
| 结构配件 | 小车底盘木板 + 连接线 | 1套 | 机械支撑和信号传输 |

技术实现:WiFi通信与控制逻辑
ESP8266的WiFi通信方案
项目采用WiFi无线通信替代传统红外或射频遥控,通信距离更远(室内可达30米),且支持多设备连接。两个ESP8266模块通过自定义通信协议交换控制指令,车载端接收指令后驱动电机执行相应动作。
MicroPython编程优势
使用MicroPython的主要优势在于:
- 代码简洁:相比C语言开发,代码量减少40%以上
- 交互开发:支持REPL实时调试,缩短开发周期
- 丰富库支持:内置network、machine等模块,简化硬件操作
核心控制代码示例(伪代码):
# 初始化WiFi连接 import network sta_if = network.WLAN(network.STA_IF) sta_if.active(True) sta_if.connect('your_ssid', 'your_password') # 电机控制函数 def control_motor(direction, speed): # 设置DRV8833引脚状态 pass制作流程与组装要点
分阶段实施步骤
- 电路焊接:将ESP8266、DRV8833和电源模块焊接到面包板
- 机械组装:将电机和轮子固定到底盘,安装电子元件
- 固件烧录:为两个ESP8266模块烧录MicroPython固件
- 程序编写:开发车载端接收程序和遥控器发送程序
- 联调测试:检查通信稳定性和电机控制精度

关键组装技巧
- 电机接线时注意正反转方向,可通过临时供电测试确认
- ESP8266需做好绝缘处理,避免金属底盘短路
- 电池固定要牢固,防止小车运动时松动导致断电
项目扩展与应用场景
功能扩展建议
- 添加避障功能:增加超声波传感器,实现自动避障
- 摄像头监控:集成ESP32-CAM模块,实现第一视角驾驶
- 手机APP控制:开发简单的手机应用,替代物理遥控器
- 路径规划:结合陀螺仪模块,实现指定路径行驶
教育与实践价值
该项目非常适合物联网入门学习,涵盖了:
- WiFi网络编程基础
- 嵌入式系统开发流程
- 电机驱动与电源管理
- 模块化设计思想
总结与资源获取
这个WiFi遥控小车项目展示了物联网技术在传统玩具改造中的应用潜力,通过ESP8266和MicroPython的组合,以极低的成本实现了功能丰富的遥控系统。无论是学生、创客还是电子爱好者,都能从中获得宝贵的实践经验。
完整项目文档和详细制作教程,请访问:WiFi遥控小车 - 项目主页
如果你对这个项目感兴趣,不妨动手尝试一下。在制作过程中遇到任何问题,欢迎在评论区交流讨论,让我们一起探索物联网世界的无限可能!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









