







前言
准备使用ADC采集加速度值,然后使用定时器进行4K采样率采样加速度芯片,通过FFT和积分得到当前振动加速度、速度、位移和频率值。
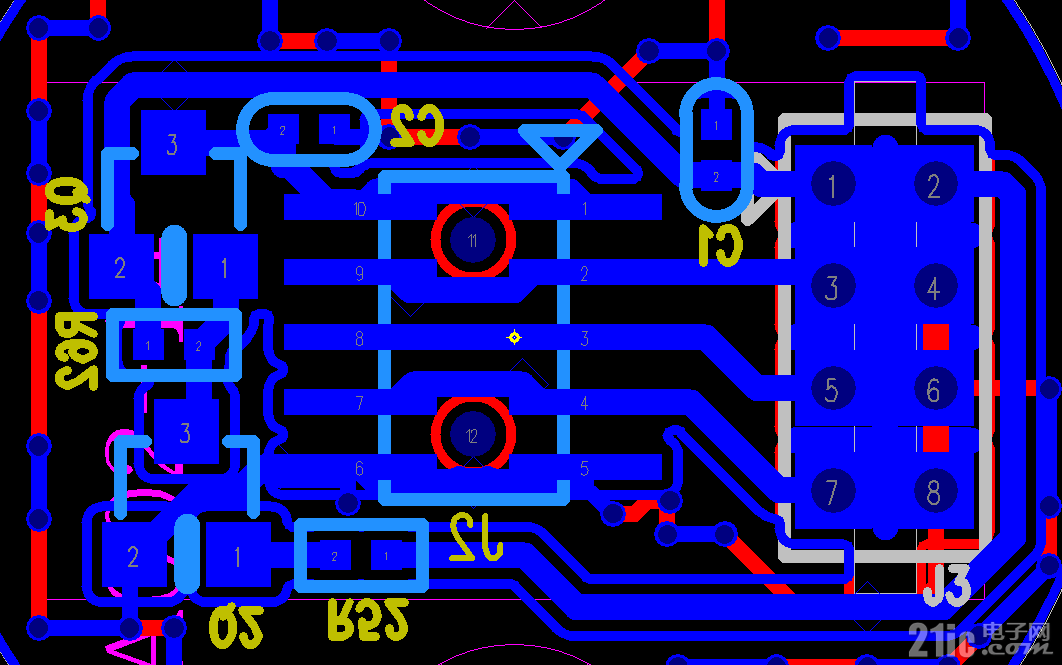
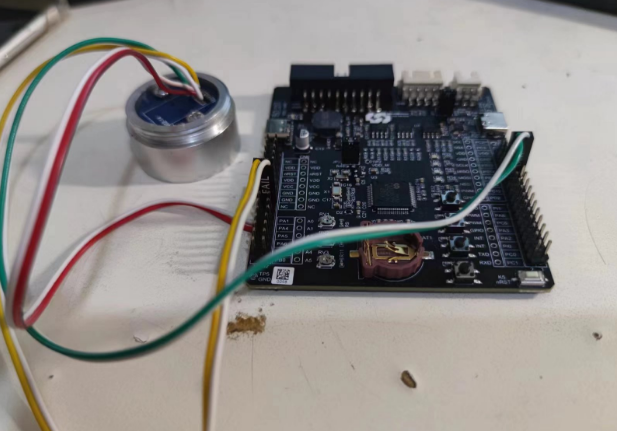
硬件焊接
之前项目用的加速度芯片FXLN8371QR1,电压输出型,现在不知道为什么这种电压输出型都停产了,基本都是SPI输出的芯片。
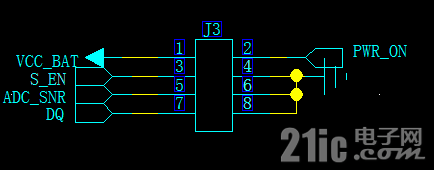
使用 PA2作为ADC采集口,对应为ADC12_IN2
PA0作为S_EN使能脚
void Device_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOC, ENABLE);
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;//PA2
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_High;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_High;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStruct);
f_fenbianlv= 2;
GPIO_WriteBit(GPIOC, GPIO_Pin_1, Bit_SET);
GPIO_WriteBit(GPIOC, GPIO_Pin_2, Bit_SET);
GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_SET);
}
ADC初始化
void ADC_Configure(void)
{
ADC_InitTypeDef ADC_InitStruct;
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
ADC_CalibrationConfig(ADC1, 0x1FE);
ADC_StructInit(&ADC_InitStruct);
ADC_InitStruct.ADC_Resolution = ADC_Resolution_12b;
ADC_InitStruct.ADC_Prescaler = ADC_Prescaler_16;
ADC_InitStruct.ADC_Mode = ADC_Mode_Imm;
ADC_InitStruct.ADC_DataAlign = ADC_DataAlign_Right;
ADC_Init(ADC1, &ADC_InitStruct);
ADC_SampleTimeConfig(ADC1, ADC_Channel_2, ADC_SampleTime_240_5);
// ADC_SampleTimeConfig(ADC1, ADC_Channel_4, ADC_SampleTime_240_5);
// ADC_SampleTimeConfig(ADC1, ADC_Channel_5, ADC_SampleTime_240_5);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
/* PA0 */
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_High;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStruct);
ADC_Cmd(ADC1, ENABLE);
}
设置定时器为4096hz
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
TIM_TimeBaseStructInit(&TIM_TimeBaseStruct);
TIM_TimeBaseStruct.TIM_Prescaler = 3;//(TIM_GetTIMxClock(TIM1) / 10000 - 1);
TIM_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStruct.TIM_Period = (10986 - 1);//(2500 - 1);//重装系数
TIM_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_Div1;
TIM_TimeBaseStruct.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStruct);
TIM_ITConfig(TIM1, TIM_IT_Update, ENABLE);
NVIC_InitStruct.NVIC_IRQChannel = TIM1_UP_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
TIM_Cmd(TIM1, ENABLE);
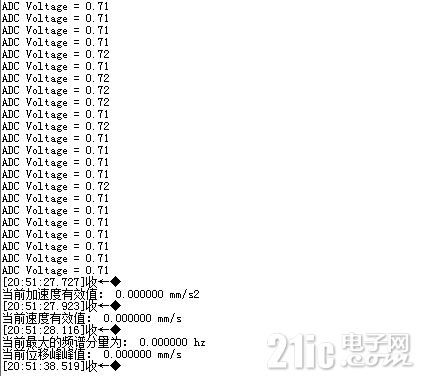
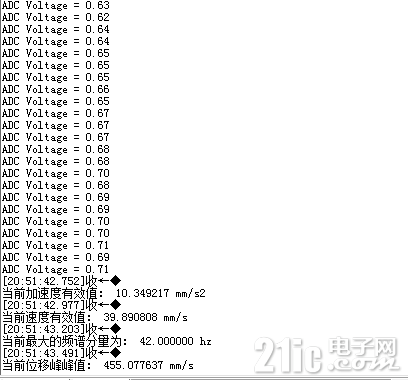
使用ADC采集数据后,进行数字滤波和FFT变换等计算后得到结果。
静止时为测试值都为0
用手摇晃传感器
测试电扇振动值:
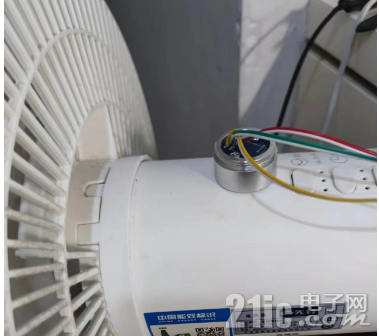
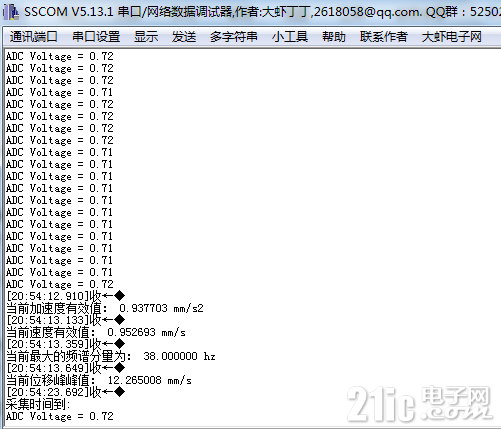
。
---------------------
作者:两只袜子
链接:https://bbs.21ic.com/icview-3391484-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。

















 6631
6631

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









