



线性规划标准模型
在最优化理论中考虑的线性规划标准模型为:
max CTX s.t. AX=b⃗ X≥0 \max ~~C^TX ~~~ \\ \text{s.t.} ~~AX = \vec{b} \\ ~~~~~~~~~~X ≥ 0max CTX s.t. AX=b X≥0
其中,C∈Rn,X∈Rn,A∈Rm×nC \in R^n,X \in R^n,A \in R^{m\times n}C∈Rn,X∈Rn,A∈Rm×n,并假定:
- 系数矩阵 AAA 的列数大于其行数,即 n > m;
- AAA 的行向量线性无关,即A行满秩。
maxCTX\max C^TXmaxCTX 是该线性规划问题的目标函数,AX=b⃗AX = \vec{b}AX=b 是约束条件中的等式约束,X≥0X ≥ 0X≥0 是对决策变量的非负性约束。
一般模型与标准模型的转换
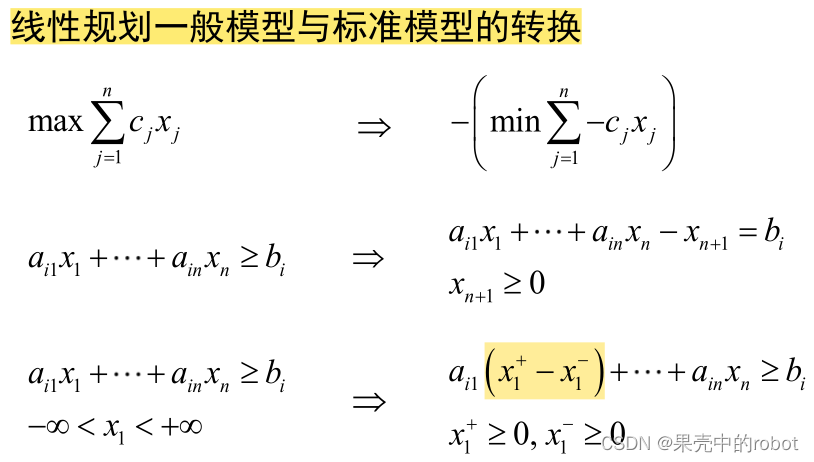
- 对于不等式约束,通过增加松弛变量,变为等式约束;
- 如果某个变量的范围是[−∞,+∞][-\infin, +\infin][−∞,+∞],则将其转换为两个非负变量相减,如 x1=x1+−x1−x_1= x_1^+ - x_1^-x1=x1+−x1−,其中−∞<x1<+∞,x1+≥0,x1−≥0-\infin < x_1 < +\infin, x_1^+ ≥ 0, x_1^- ≥ 0−∞<x1<+∞,x1+≥0,x1−≥0.
线性规划标准模型的基本假定
系数矩阵A的列数大于其行数,即 n > m
如果 n < m, 由于 a⃗1,a⃗2,...,a⃗m\vec{\bm{a}}_1, \vec{\bm{a}}_2, ..., \vec{\bm{a}}_ma1,a2,...,am 是 m 个 n维的向量,不可能线性无关;如果 n = m,AAA 是行向量线性无关的方阵,因此可逆,满足 AX=b⃗AX= \vec{b}AX=b 的只有一个向量 X^=A−1b⃗\hat{X} = A^{-1}\vec{b}X^=A−1b,这种情况就不需要优化了。
系数矩阵A的行向量线性无关
系数矩阵AAA的行向量为 a⃗1T,a⃗2T,...,a⃗mT\vec{\bm{a}}_1^T, \vec{\bm{a}}_2^T,..., \vec{\bm{a}}_m^Ta1T,a2T,...,amT,如果这些行向量不满足线性无关,那么对于某个行向量,比如 a⃗mT\vec{\bm{a}}_m^TamT 可以由其他的行向量线性表示,即:
a⃗mT=λ1a⃗1T+λ2a⃗2T+...+λm−1a⃗m−1T \vec{\bm{a}}_m^T = \lambda_1 \vec{\bm{a}}_1^T + \lambda_2 \vec{\bm{a}}_2^T + ... + \lambda_{m-1} \vec{\bm{a}}_{m-1}^TamT=λ1a1T+λ2a2T+...+λm−1am−1T
则对任何满足前 m-1 个约束的优化变量 XXX 都有下式成立:
a⃗mTX=λ1a⃗1TX+λ2a⃗2TX+...+λm−1a⃗m−1TX=λ1b1+λ2b2+...+λm−1bm−1 \vec{\bm{a}}_m^T X= \lambda_1 \vec{\bm{a}}_1^TX + \lambda_2 \vec{\bm{a}}_2^TX + ... + \lambda_{m-1} \vec{\bm{a}}_{m-1}^TX = \lambda_1b_1 + \lambda_2b_2 + ... + \lambda_{m-1}b_{m-1}amTX=λ1a1TX+λ2a2TX+...+λm−1am−1TX=λ1b1+λ2b2+...+λm−1bm−1
当 bm=λ1b1+λ2b2+...+λm−1bm−1b_m = \lambda_1b_1 + \lambda_2b_2 + ... + \lambda_{m-1}b_{m-1}bm=λ1b1+λ2b2+...+λm−1bm−1 时,第m个约束不起作用,因此可以删除,而若该等式不满足,则原问题无可行解。综上,只有当系数矩阵AAA的行向量线性无关时,该线性规划问题才有意义。

















 6386
6386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









