




 本文探讨了在大规模运动规划中,如何通过位形空间路径规划的三种方法,结合Dijkstra和A*算法,处理二维障碍物问题。重点介绍了可视图算法的原理及其在障碍物识别中的应用,以及如何考虑安全空间对路径的影响。
本文探讨了在大规模运动规划中,如何通过位形空间路径规划的三种方法,结合Dijkstra和A*算法,处理二维障碍物问题。重点介绍了可视图算法的原理及其在障碍物识别中的应用,以及如何考虑安全空间对路径的影响。
现在有一个理论框架,可以(以此切入)考虑大面积的运动规划问题,如何在位形空间中规划路径,下面来探讨一下该问题的三种不同解法,它们的出发点是一样的
也就是,一开始它们都将(机器人的)运动放到连续位形空间里进行规划,然后用不同的方法在图像中对问题进行重构,于是我们就可以应用讨论过的算法,如烧草、Dijikstra 和 A* 算法,我们可以用接下来的图中呈现的2D规划方案来阐明这些方法。
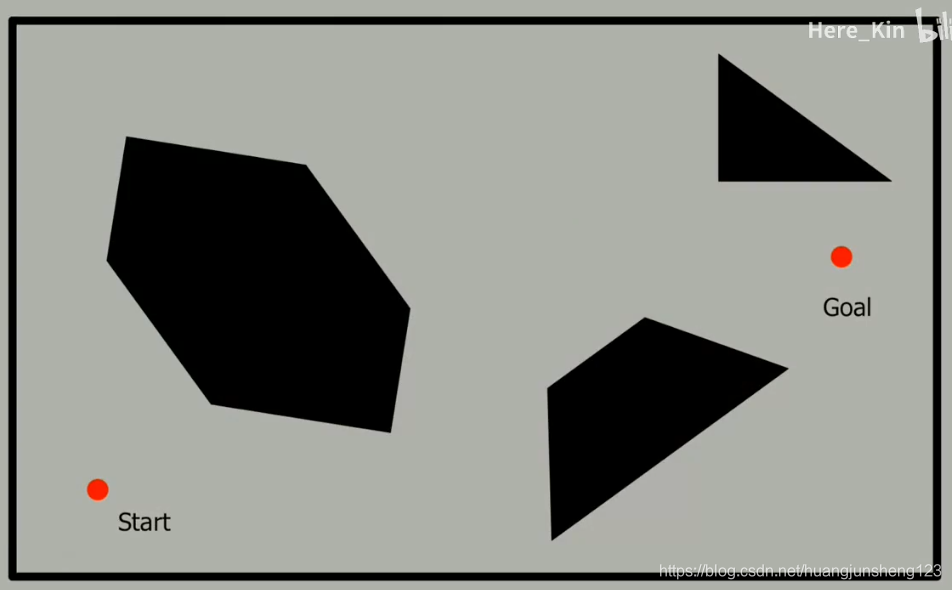
像往常样,我们的目标是,在二维的位形空间内找到一个从起点到终点的轨迹,在这个例子中,位形空间中的障碍物被简化成多边形,表明将出现离散化的现象。
如下图所示,我们将(起始)点和每个位形空间光学顶点(optical vertex)两两相连,然后,我们只需要计算这个可视图(visibility graph)(中的数据)。
具体地说,我们在任意两个顶点之间绘制一条边,这两个点可用直线连接,而且这些直线完全处于自由空间,注意,同个障碍上的相邻顶点间的边也包括在内。【这里感觉官方课件中少画了一条边,所以用红色双向箭头补上】
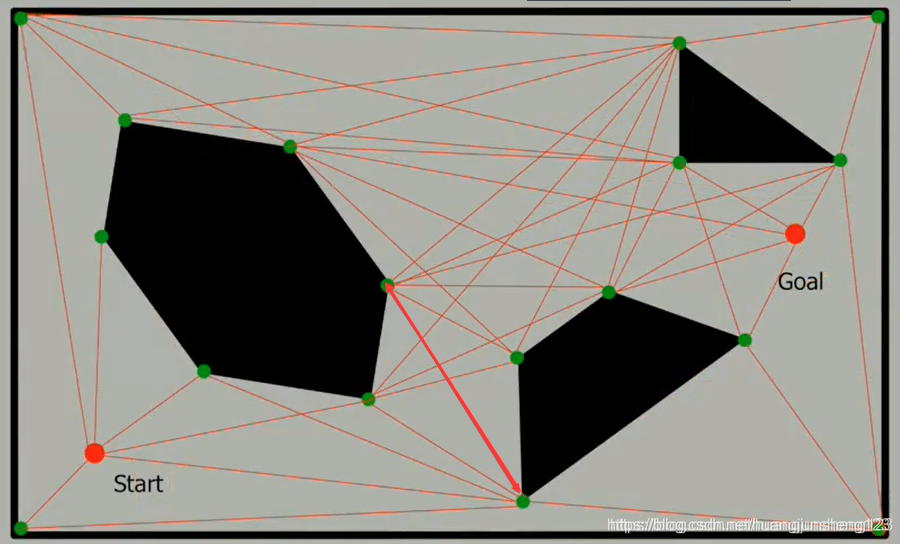
为了能够让算法运作起来,我们需要确定,在位形空间中任何两点之间的线与障碍是否相交,在此图中的位形空间,其障碍是多边形的,实际上(对于算法的运行)是相对简单的,在这个图中,我们把起点和终点也算作(需要描绘的)点。
完成这一步后,让我们回到一开始讨论的的规划问题中,我们的目标是,建立一条从起点到终点的最短路径,解决这个问题很简单用Dijkstra算法就行,这里是这个例子中我们所找到的最短路径的结果。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 17万+
17万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









