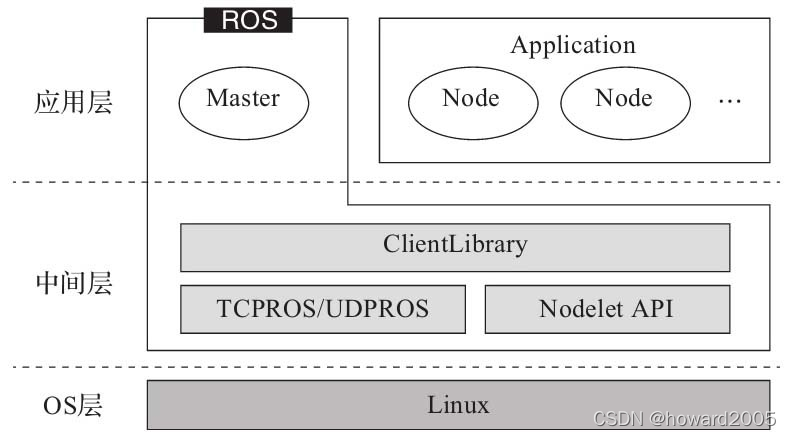
文章目录 一、ROS架构 二、第一个ROS例程 (一)turtlesim功能包 1、话题与服务 2、背景色参数 (二)控制乌龟运动 1、启动节点管理器 2、启动乌龟仿真器节点 3、启动键盘控制节点 三、创建工作空间和功能包 (一)工作空间典型结构 (二)创建工作空间 1、创建工作空间 2、编译工作空间 3、让环境变量生效 一、ROS架构 ROS架构分为三个层次:OS层 ⟹ \Longrightarrow ⟹中间层 ⟹ \Longrightarrow ⟹应用层








 超级会员免费看
超级会员免费看
 本文深入介绍了ROS架构的三个层次,并通过一个实际的turtlesim例程展示了ROS的基础操作,包括话题与服务、背景色参数的设置。此外,详细阐述了如何控制乌龟运动,启动节点管理器、乌龟仿真器节点和键盘控制节点。最后,探讨了ROS工作空间的创建,包括典型结构、初始化、编译和环境变量生效的步骤。
本文深入介绍了ROS架构的三个层次,并通过一个实际的turtlesim例程展示了ROS的基础操作,包括话题与服务、背景色参数的设置。此外,详细阐述了如何控制乌龟运动,启动节点管理器、乌龟仿真器节点和键盘控制节点。最后,探讨了ROS工作空间的创建,包括典型结构、初始化、编译和环境变量生效的步骤。

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








