



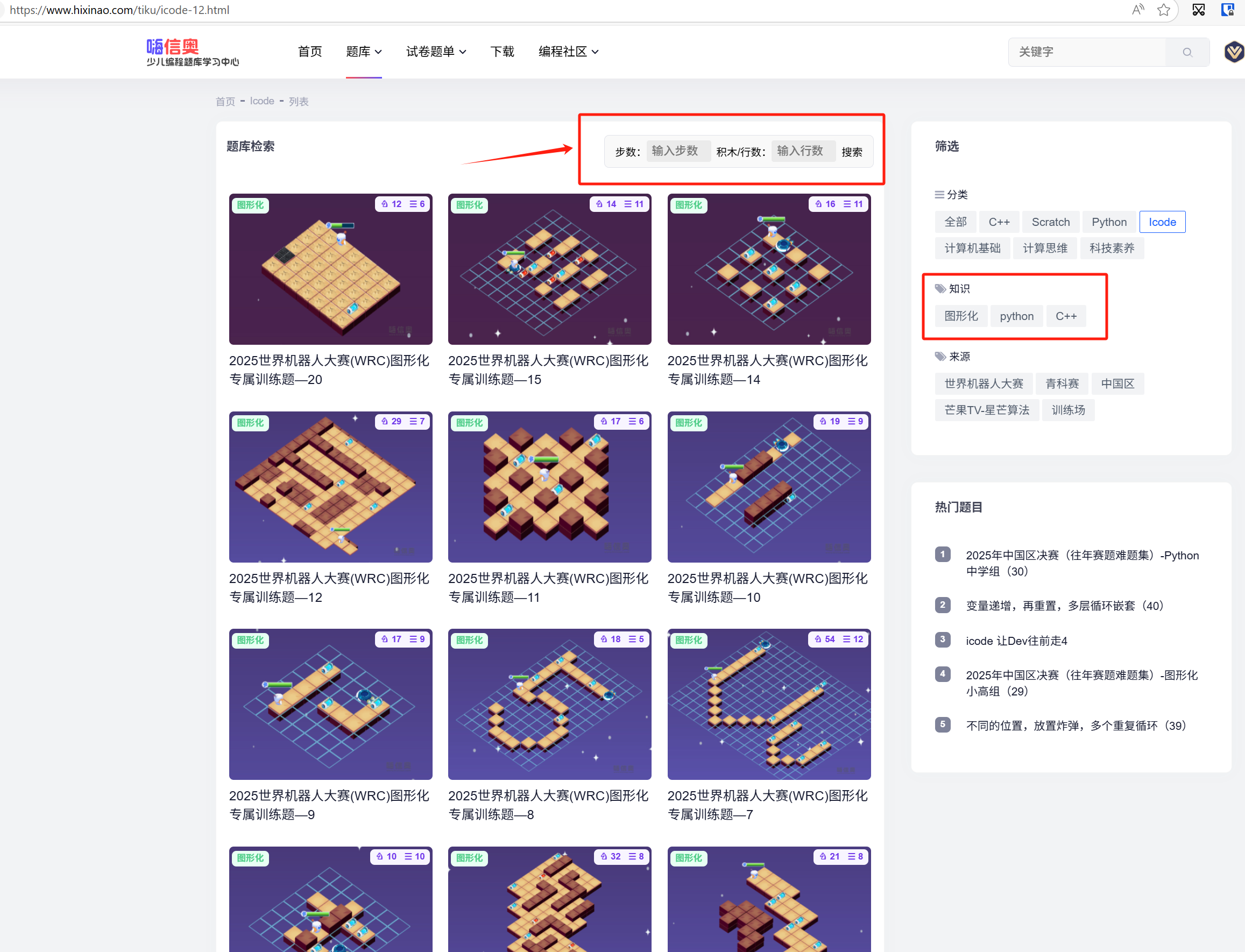
Icode的题型很多,有时候买了文件,但是每次遇到不懂的题时,需要去茫茫众多的文件中去一个个找,个人觉得很麻烦,因此我们开发了通过 步数和积木块去快速定位到你不懂的题,快速查看到答案,方便高效快速~
重要的是Icode好多题目,有些题目是重合的,因此我们在整理时会进行区分,来自训练场就不再重复录入~
大家伙只需根据“步数”和“积木块”,去检索你需要的题目即可,我们会持续更新,若没检索到的话请耐心等待,或者你们着急的话可以联系我们催更~
也欢迎大家给我们投稿,我们解答后放上平台~
Icode的题型很多,有时候买了文件,但是每次遇到不懂的题时,需要去茫茫众多的文件中去一个个找,个人觉得很麻烦,因此我们开发了通过 步数和积木块去快速定位到你不懂的题,快速查看到答案,方便高效快速~
重要的是Icode好多题目,有些题目是重合的,因此我们在整理时会进行区分,来自训练场就不再重复录入~
大家伙只需根据“步数”和“积木块”,去检索你需要的题目即可,我们会持续更新,若没检索到的话请耐心等待,或者你们着急的话可以联系我们催更~
也欢迎大家给我们投稿,我们解答后放上平台~
 8969
8969

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























