



本文基于下述链接修改
鱼眼图像的全景矫正_鱼眼图像校正-优快云博客
相对于woodscape柱面图的转换,优势是盲区范围更小,转换过程不需要鱼眼相机的畸变参数,只需要相机内参中的主点和相机的外参角度即可
woodscape柱面转换
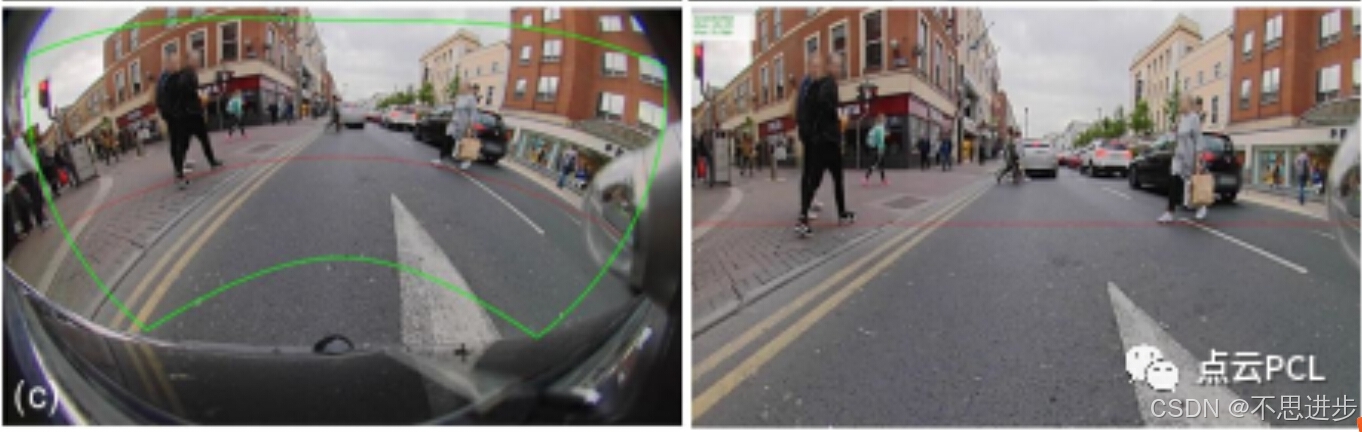
上述链接的转换效果如下:
1、左侧为鱼眼原图,右侧为转换出的柱面图,右侧柱面图的边框(绿色点)映射回左侧原图绿色点(原图中绿线围起来区域代表转换的范围)。
2、左侧原图中的红色点为在鱼眼原图中手动选的点,右图中红色的点为左图中通过下面推导的公式映射过去的点

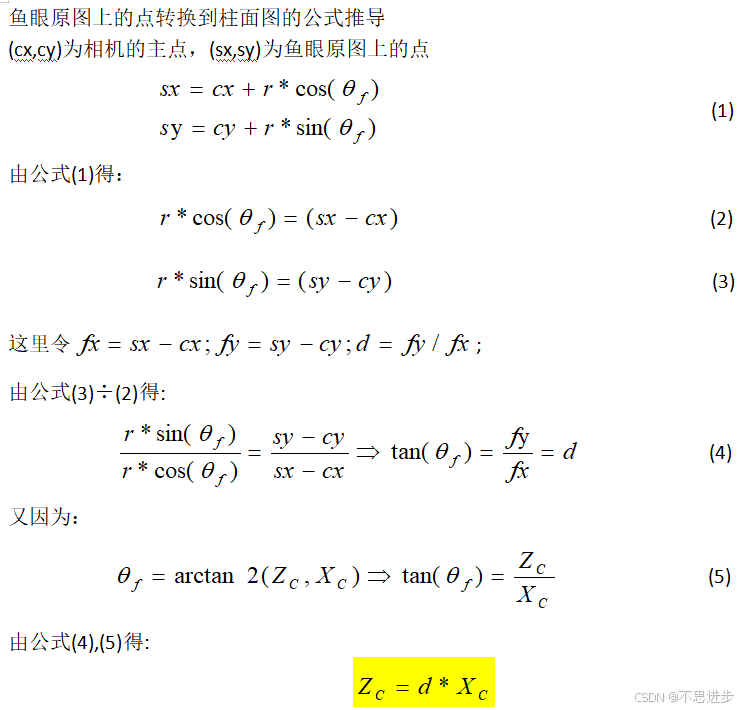
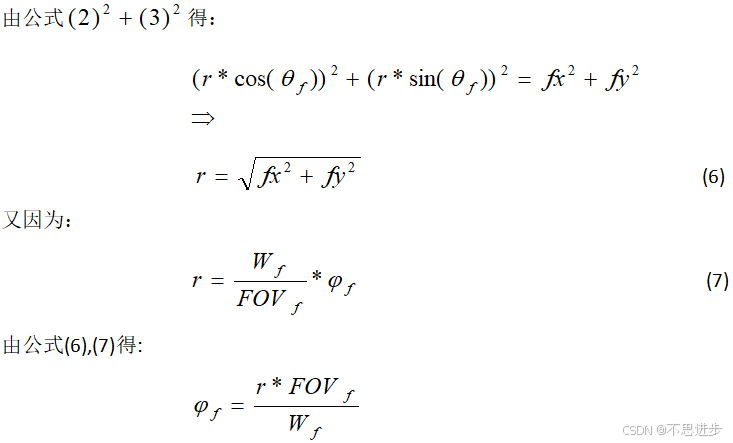
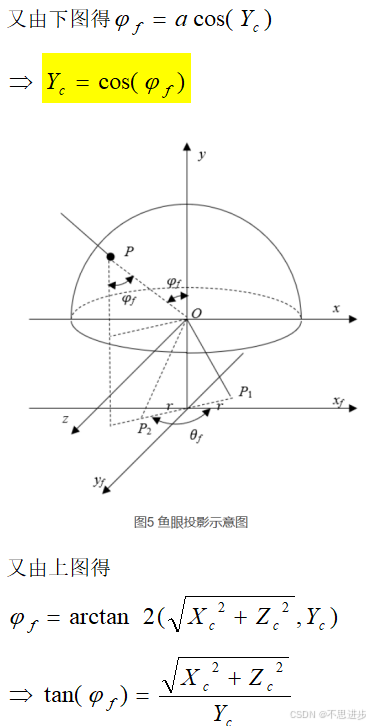
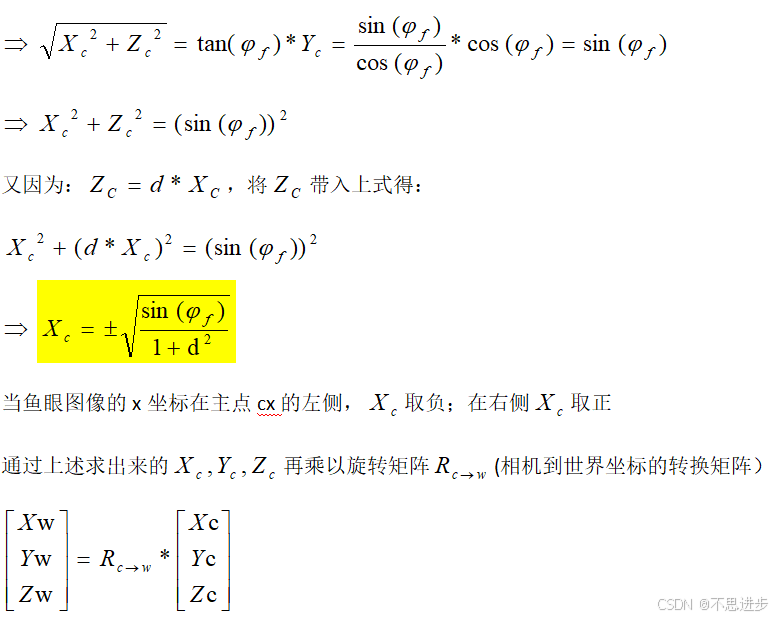
上述文章给出了柱面图中的点到鱼眼原图点的转换关系,本文根据上述文章给出鱼眼原图上的点转到柱面图的公式推导:

下面为全部代码包括 鱼眼转柱面和柱面转鱼眼的过程,柱面图的宽高可自己设定。柱面图的宽是按照光轴分别向左右做经度90度展开。ratioy控制图像上沿纬度的展开范围
#include <iostream>
#include <opencv2/opencv.hpp>
typedef struct _FisheyeExtrinsicParam {
float rx;
float ry;
float rz;
}FisheyeExtrinsicParam;
typedef struct _FisheyeIntrinsicParam {
float cx;
float cy;
}FisheyeIntrinsicParam;
void initCylindricalTable(double* theta, double* phi, int sphereW, int sphereH);
int swInitCameraRMatrix(FisheyeExtrinsicParam* fisheyeExtriParam, double* pRotateMatrix);
void initCylindricalToFisheyeMap(cv::Point2f* sphereMap, double* theta, double* phi,
double FOV, double R, double* rmatw2c, FisheyeIntrinsicParam* pIntriParam);
void equidistantCylindricalToFisheyePoint(cv::Point pIn, cv::Point2f* pOut, double* theta, double* phi,
double FOV, double R, double* rmatw2c, FisheyeIntrinsicParam* pIntriParam);
void fisheyeToCylindricalPoint(cv::Point src, cv::Point* dst, double FOV, double R, double* rmatw2c, FisheyeIntrinsicParam* pIntriParam);
cv::Mat cylindricalToFisheyeImage(const cv::Mat& src, cv::Point2f* sphereMap);
void drawConversionRange(const cv::Mat& cylinderImg, const cv::Mat& src, cv::Point2f* sphereMap);
const int imageW = 1920; //鱼眼原图宽
const int imageH = 1536; //鱼眼原图高
const int sphereW = 640 ; //柱面图的宽(可自己设定)
const int sphereH = 448; //柱面图的高
const float ratioy = 0.4;
float R = imageW / 2.0f;
double FOV = 180 * CV_PI / 180.0f; // FOV of the fisheye, eg: 180 degrees
double theta[sphereW];
double phi[sphereH];
cv::Point2f gSPHERE_MAP[sphereW * sphereH]; //存储柱面图的点对应的原图点索引
int main()
{
cv::Mat dst;
cv::Point p[10] = { {106,905},{1749,768},{322,492},{1021,244},{1044,956},
{445,1134},{1586,1010},{1004,598},{843,210},{202,524}};
cv::Point pd[10];
cv::Size dstSize(imageW/3, imageH /3);
FisheyeExtrinsicParam extri = { 0 };
FisheyeIntrinsicParam intri = { 0 };
double rotateMatW2C[9] = { 0 };
extri.rx = -38.156; //外参角度
extri.ry = -1.236;
extri.rz = -0.341;
intri.cx = 958.520996;//内参 主点
intri.cy = 769.257629;
// Read the input fisheye image
cv::Mat fisheyeImage = cv::imread("right.jpg");
if (fisheyeImage.empty()) {
std::cout << "Error: Could not read the input image." << std::endl;
return -1;
}
//------------------初始化只调用一次-生成映射表gSPHERE_MAP---------------------start
swInitCameraRMatrix(&extri, rotateMatW2C);
initCylindricalTable(theta, phi, sphereW, sphereH);
initCylindricalToFisheyeMap(gSPHERE_MAP, theta, phi,
FOV, R, rotateMatW2C, &intri);
//------------------初始化只调用一次-生成映射表gSPHERE_MAP---------------------end
//生成柱面图只用柱面到原图的映射表即可
cv::Mat sphericalImage = cylindricalToFisheyeImage(fisheyeImage, gSPHERE_MAP);
drawConversionRange(sphericalImage,fisheyeImage, gSPHERE_MAP);
for (int k = 0; k < 10; k++)//验证原图上的点转到柱面图是否正确
{
cv::circle(fisheyeImage, p[k], 8, cvScalar(0, 0, 255), -1);
fisheyeToCylindricalPoint(p[k], &pd[k],FOV, R, rotateMatW2C, &intri);
cv::circle(sphericalImage, pd[k], 3, cvScalar(0, 0, 255), -1);
}
cv::resize(fisheyeImage, dst, dstSize, 0, 0, cv::INTER_NEAREST);
cv::imshow("Image", dst);
cv::imshow("Spherical Image", sphericalImage);
cv::waitKey(0);
return 0;
}
void initCylindricalTable(double* theta, double* phi, int sphereW,int sphereH)
{
double halfPi = CV_PI * 0.5;
//by default, the horizontal FOV is[-pi, pi], the verticle FOV is[-pi / 2, pi / 2]
double interval = (1 - (-ratioy)) * 1.0 / sphereH;
for (int i = 0; i < sphereH; ++i)
{
phi[i] = (-ratioy + i * interval) * halfPi;//latitude of the equirectangular
}
interval = (1 - (-1)) * 1.0 / sphereW;
for (int i = 0; i < sphereW; ++i)
{
theta[i] = (-1 + i * interval) * halfPi;//longitude of the equirectangular
}
}
//矩阵相乘
/*
参数: a 矩阵 m行,n列
b 矩阵 n行,k列
结果矩阵 c 矩阵 m行,k列
*/
void swMultiMatrix(double* a, double* b, int m, int n, int k, double* c)
{
int i, j, l, u;
for (i = 0; i <= m - 1; i++)
for (j = 0; j <= k - 1; j++)
{
u = i * k + j;
c[u] = 0;
for (l = 0; l <= n - 1; l++)
c[u] = c[u] + a[i * n + l] * b[l * k + j];
}
return;
}
// R[w-c]: world -> camera
int swInitCameraRMatrix(FisheyeExtrinsicParam* fisheyeExtriParam, double* pRotateMatrix)
{
float rx = (float)(fisheyeExtriParam->rx * CV_PI / 180.0f);
float ry = (float)(fisheyeExtriParam->ry * CV_PI / 180.0f);
float rz = (float)(fisheyeExtriParam->rz * CV_PI / 180.0f);
double R_temp[9];
double R_X[9] = {
1, 0, 0,
0, cos(rx), -sin(rx),
0, sin(rx), cos(rx)
};
double R_Y[9] = {
cos(ry), 0, sin(ry),
0, 1, 0,
-sin(ry), 0, cos(ry)
};
double R_Z[9] = {
cos(rz), -sin(rz), 0,
sin(rz), cos(rz), 0,
0, 0, 1
};
swMultiMatrix(R_Z, R_Y, 3, 3, 3, R_temp);
swMultiMatrix(R_temp, R_X, 3, 3, 3, pRotateMatrix);
return 1;
}
void equidistantCylindricalToFisheyePoint(cv::Point pIn,cv::Point2f* pOut, double *theta,double *phi,
double FOV,double R,double* rmatw2c, FisheyeIntrinsicParam* pIntriParam)
{
int x = pIn.x;
int y = pIn.y;
double Xw = cos(phi[y]) * sin(theta[x]);
double Yw = cos(phi[y]) * cos(theta[x]);
double Zw = sin(phi[y]);
double Xc = (rmatw2c[0] * Xw) + (rmatw2c[1] * Yw) + (rmatw2c[2] * Zw);
double Yc = (rmatw2c[3] * Xw) + (rmatw2c[4] * Yw) + (rmatw2c[5] * Zw);
double Zc = (rmatw2c[6] * Xw) + (rmatw2c[7] * Yw) + (rmatw2c[8] * Zw);
// Calculate fisheye angle and radius
// double phi_f2 = atan2(sqrt(Xc * Xc + Zc * Zc), (Yc /*+ 1e-12*/));
double phi_f = acos(Yc);//phi_f2 等价于phi_f
double r_f = phi_f * 2 * R / FOV;
double theta_f = atan2(Zc, Xc);
if (abs(Xc) < 1e-12){
theta_f = atan2(Zc, (Xc + 1e-12));
}else{
theta_f = atan2(Zc, Xc);
}
// Pixel in fisheye space
float fishX = pIntriParam->cx + r_f * cos(theta_f);
float fishY = pIntriParam->cy + r_f * sin(theta_f);
if (fishX < 0.0)
{
fishX = 0;
}
if (fishX > static_cast<float>(imageW) - 1.0)
{
fishX = imageW - 1.0;
}
if (fishY < 0.0)
{
fishY = 0;
}
if (fishY > static_cast<float>(imageH) - 1.0)
{
fishY = static_cast<float>(imageH) - 1.0;
}
pOut->x = fishX;
pOut->y = fishY;
}
void fisheyeToCylindricalPoint(cv::Point src, cv::Point* dst, double FOV, double R, double* rmatw2c, FisheyeIntrinsicParam* pIntriParam)
{
float dx = 0.0f;
float fx = src.x - pIntriParam->cx;
float fy = src.y - pIntriParam->cy;
if (abs(fx) < 1e-12)
{
dx = fy / (fx + 1e-12);
}
else
{
dx = fy / fx;
}
double r_f = sqrt(fx * fx + fy * fy);
if (fx < 0)
{
r_f = -sqrt(fx * fx + fy * fy);
}
double phi_f = (r_f * FOV) / (2 * R);
double Yc = cos(phi_f);
double Xc = sin(phi_f) * sqrt(1 / (1 + dx * dx));
double Zc = Xc * dx;
double Xw = (rmatw2c[0] * Xc) + (rmatw2c[3] * Yc) + (rmatw2c[6] * Zc);//rmatw2c的转置 camera->world
double Yw = (rmatw2c[1] * Xc) + (rmatw2c[4] * Yc) + (rmatw2c[7] * Zc);
double Zw = (rmatw2c[2] * Xc) + (rmatw2c[5] * Yc) + (rmatw2c[8] * Zc);
double interval = (1 - (-ratioy)) * 1.0 / sphereH;
dst->y = (int)(((asin(Zw) * 2 / CV_PI) + ratioy) / interval + 0.5);
double interval2 = (1 - (-1)) * 1.0 / sphereW;
dst->x = (int)((atan2(Xw, Yw)*2 / CV_PI + 1) / interval2 + 0.5);
}
void initCylindricalToFisheyeMap(cv::Point2f* sphereMap,double* theta, double* phi,
double FOV, double R, double* rmatw2c, FisheyeIntrinsicParam* pIntriParam)
{
for (int y = 0; y < sphereH; ++y)
{
for (int x = 0; x < sphereW; ++x)
{
equidistantCylindricalToFisheyePoint(cv::Point(x, y), &sphereMap[y * sphereW + x], theta, phi, FOV, R, rmatw2c, pIntriParam);
}
}
}
cv::Mat cylindricalToFisheyeImage(const cv::Mat& src,cv::Point2f* sphereMap)
{
cv::Point2f fishPoint;
cv::Mat dest(sphereH, sphereW, CV_8UC3);
for (int y = 0; y < sphereH; ++y)
{
for (int x = 0; x < sphereW; ++x)
{
fishPoint = sphereMap[y * sphereW + x];
cv::Vec3b color = src.at<cv::Vec3b>(static_cast<int>(fishPoint.y + 0.5), static_cast<int>(fishPoint.x + 0.5));
dest.at<cv::Vec3b>(y, x) = color;
}
}
return dest;
}
void drawConversionRange(const cv::Mat& cylinderImg, const cv::Mat& src, cv::Point2f* sphereMap)
{
cv::Point2f fishPoint;
cv::Point drawPoint;
#if 1
for (int x = 0; x < cylinderImg.cols; ++x)
{
drawPoint.x = x;
drawPoint.y = 1;
cv::circle(cylinderImg, drawPoint, 1, cvScalar(0, 255, 0), -1);
drawPoint.x = x;
drawPoint.y = cylinderImg.rows-2;
cv::circle(cylinderImg, drawPoint, 1, cvScalar(0, 255, 0), -1);
}
for (int y = 0; y < cylinderImg.rows; ++y)
{
drawPoint.x = 1;
drawPoint.y = y;
cv::circle(cylinderImg, drawPoint, 1, cvScalar(0, 255, 0), -1);
drawPoint.x = cylinderImg.cols - 2;
drawPoint.y = y;
cv::circle(cylinderImg, drawPoint, 1, cvScalar(0, 255, 0), -1);
}
#endif
for (int x = 0; x < sphereW; ++x)
{
fishPoint = sphereMap[1*sphereW + x];
drawPoint.x = static_cast<int>(fishPoint.x + 0.5);
drawPoint.y = static_cast<int>(fishPoint.y + 0.5);
cv::circle(src, drawPoint, 3, cvScalar(0, 255, 0), -1);
fishPoint = sphereMap[(sphereH-1) * sphereW + x];
drawPoint.x = static_cast<int>(fishPoint.x + 0.5);
drawPoint.y = static_cast<int>(fishPoint.y + 0.5);
cv::circle(src, drawPoint, 3, cvScalar(0, 255, 0), -1);
}
for (int y = 0; y < sphereH; ++y)
{
fishPoint = sphereMap[y * sphereW+1];
drawPoint.x = static_cast<int>(fishPoint.x + 0.5);
drawPoint.y = static_cast<int>(fishPoint.y + 0.5);
cv::circle(src, drawPoint, 3, cvScalar(0, 255, 0), -1);
fishPoint = sphereMap[y * sphereW + sphereW-1];
drawPoint.x = static_cast<int>(fishPoint.x + 0.5);
drawPoint.y = static_cast<int>(fishPoint.y + 0.5);
cv::circle(src, drawPoint, 3, cvScalar(0, 255, 0), -1);
}
}
有需要原图的可以私信我


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









