




1、箭头标注
可以采用labelme标注工具标注,我在windows下使用如下链接
Windows环境使用Lableme - LiWeixiao - 博客园 (cnblogs.com)
- 标注格式:3点折线
- 类型:arrowPoint
- 标注细则
- )箭头的三个点全部可见且清晰
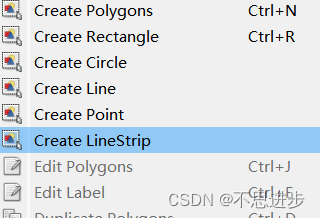
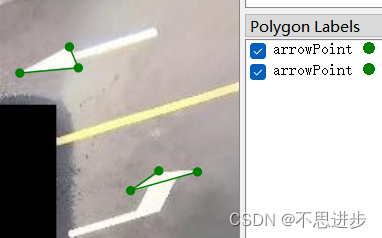
- )Labelme打开后,鼠标右键选中Create LineStrip
 先标箭头的顶点,然后逆时针标另外两个点(三个点不用闭合),存储类别为arrowPoint。
先标箭头的顶点,然后逆时针标另外两个点(三个点不用闭合),存储类别为arrowPoint。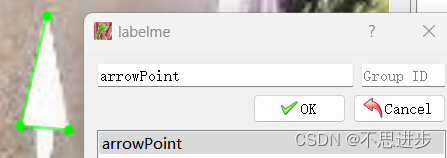
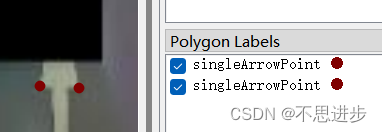
- )有一个及以上点被遮挡或看不见,其余点按单点标注,Labelme打开后,鼠标右键选中Create Point
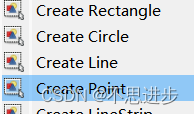 ,标注单点类别为singleArrowPoint。
,标注单点类别为singleArrowPoint。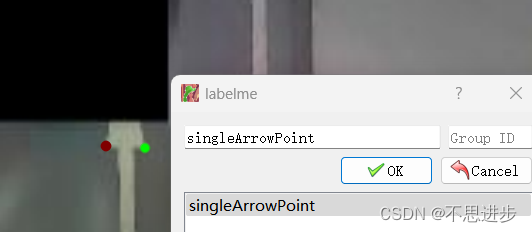
2、labelme格式的json文件转voc格式的xml文件
把labeme标注的json格式的文件写个脚本,分别生成:
1、箭头的最小外接矩形框(箭头的三个顶点),下图arrowRect类别矩形框
2、箭头三个顶点的外接矩形框(以箭头顶点为中心),下图arrowPointRect类别矩形框
下图为labeme标注的箭头
下图为上图json文件生成的 矩形框,箭头外接矩形框(arrowRect),三个箭头顶点矩形框(以箭头顶点为中心生成固定长度的正方形框arrowPointRect)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 693
693









 到【灌水乐园】发言
到【灌水乐园】发言







