








参考下图, 我们以摄像头画面的发布、 处理、 显示为例讲讲topic通信的流程。 在机器人上的
摄像头拍摄程序是一个node( 圆圈表示,我们记作node1) , 当node1运行启动之后, 它作为
一个Publisher就开始发布topic。 比如它发布了一个topic( 方框表示) , 叫做 /camera_rgb ,
是rgb颜色信息, 即采集到的彩色图像。 同时, node2假如是图像处理程序,它订阅
了 /camera_rgb 这个topic, 经过节点管理器的介绍, 它就能建立和摄像头节点( node1) 的连
接。
那么怎么样来理解“异步”这个概念呢? 在node1每发布一次消息之后, 就会继续执行下一个动
作, 至于消息是什么状态、 被怎样处理, 它不需要了解; 而对于node2图像处理程序, 它只管
接收和处理 /camera_rgb 上的消息, 至于是谁发来的, 它不会关心。 所以node1、 node2两者
都是各司其责, 不存在协同工作, 我们称这样的通信方式是异步的。
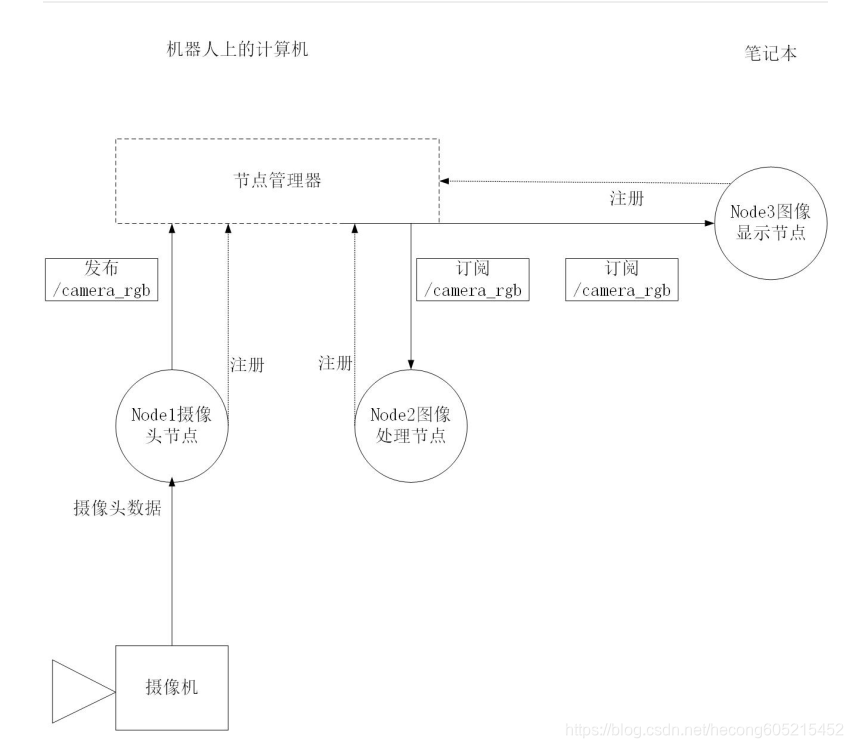
ROS是一种分布式的架构, 一个topic可以被多个节点同时发布, 也可以同时被多个节点接
收。 比如在这个场景中用户可以再加入一个图像显示的节点, 我们在想看看摄像头节点的画
面, 则可以用自己的笔记本连接到机器人上的节点管理器, 然后在自己的电脑上启动图像显
示节点。
这就体现了分布式系统通信的好处: 扩展性好、 软件复用率高。
通信



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









