



1、工具
从官网下载质量检测工具:Depth Quality Tool
动态校准工具:Dynamic Calibrator
2、检测当前成像质量
将相机对准平坦的表面,例如约1至2米(3至6英尺)的墙壁。 避免黑色表面。 图像上有很多黑点或黑洞,表明相机未校准。

3、校准操作
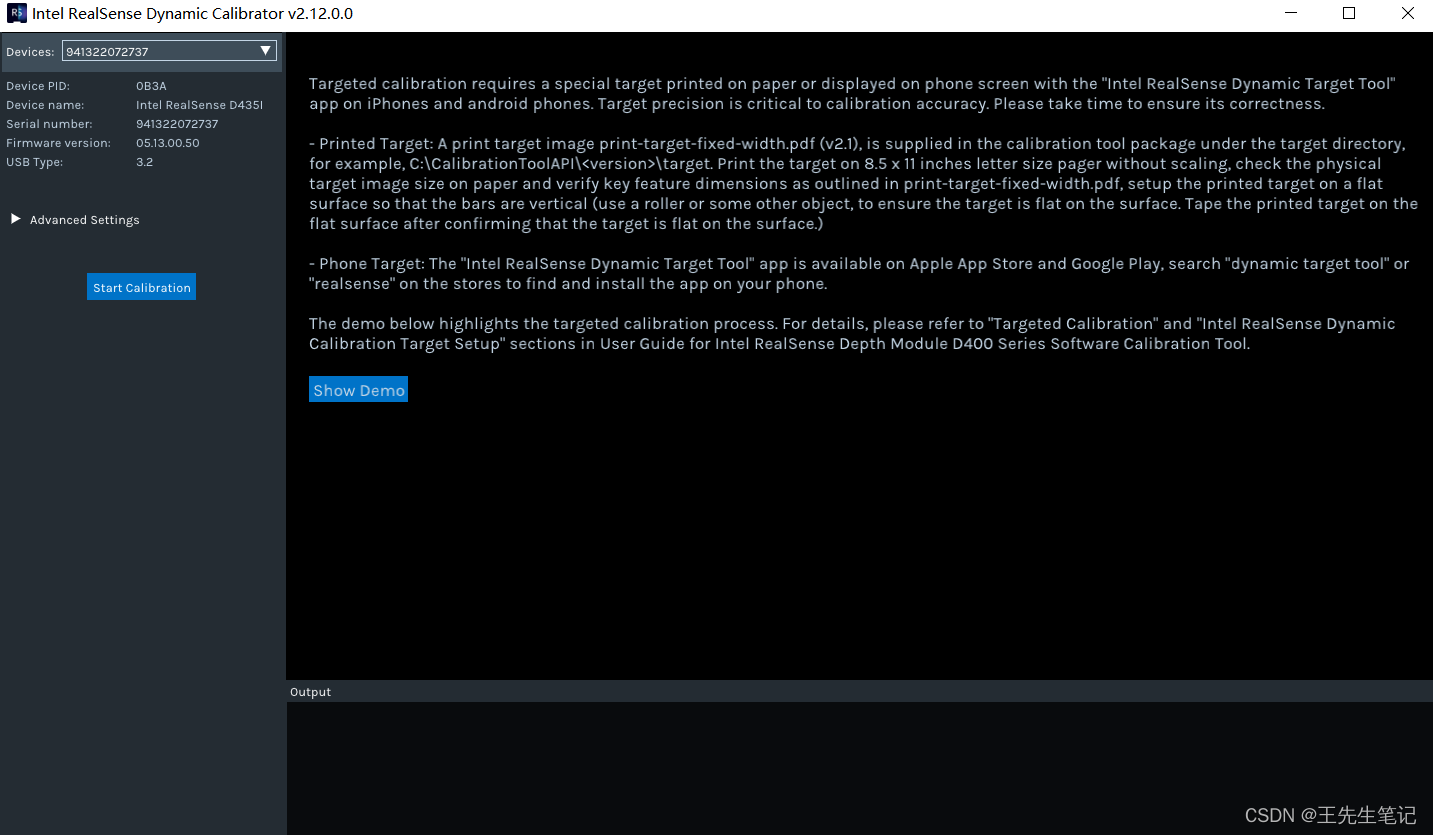
打印目标:使用普通的激光打印机在8.5“ x 11”信纸尺寸(A4)的纸张上打印,在打印机选项中选择“实际尺寸”,在打印目标之后,检查纸张上的物理目标图像。

使用动态校准工具进行校准,点击开始校准按照提示操作即可,将图像的蓝色区域全扫描一遍。
完成后会自动更新参数进去。

再次检查成像质量

明显减少了黑色斑点。
4、校准操作后成像不理想
可以选择恢复出厂参数
在校准工具安装目录里有Intel.Realsense.CustomRW.exe

执行以下命令,获得当前连接的设备列表
Intel.Realsense.CustomRW.exe -list
再对需要恢复的设备进行恢复
Intel.Realsense.CustomRW.exe -sn "对应设备的串口号" -g
具体操作如下

然后再重新执行校准操作即可。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









