







Navigation 2 是什么
Nav2 是 ROS 导航 的综合控制服务,类似人类的小脑控制人类的行走及身体平衡,Nav2
针对移动和地面机器人提供支持的自动驾驶车辆的相同类型的技术,经过优化和改造。该项目旨在找到一种安全的方法,使移动机器人能够在多种类型的环境和机器人运动学类别中完成复杂的任务。它不仅可以从
A 点移动到 B 点,而且可以具有中间姿势,并代表其他类型的任务,例如对象跟踪、完整的覆盖导航等。
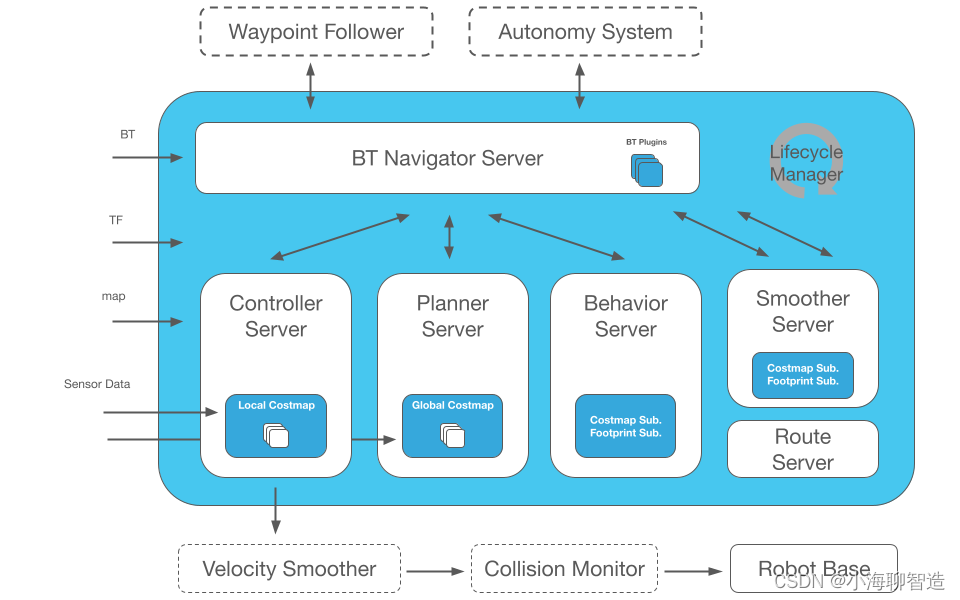
官方Navigation 2 服务架构图
下图将让您初步了解 Nav2 的结构。注意:每个服务器中可以有多个用于控制器、规划器和恢复的插件,并具有匹配的 BT 插件。这可用于创建上下文导航行为
主要实现功能:
它提供感知、规划、控制、定位、可视化等功能,以构建高度可靠的自主系统。这将完成来自传感器数据的环境建模、动态路径规划、计算电机速度、避开障碍物、表示语义区域和对象以及构建更高级别的机器人行为。
Nav2 使用行为树通过编排许多独立的模块化服务器来创建定制的智能导航行为。任务服务器可用于计算路径、控制工作、恢复或任何其他与导航相关的任务。这些单独的服务器通过 ROS 接口(例如操作服务器或服务)与行为树 (BT) 进行通信。机器人可以利用潜在的许多不同的行为树来允许机器人执行许多类型的独特任务。
Nav2 的预期输入是符合 REP-105 的 TF 转换、地图源(如果使用静态成本地图层)、BT XML 文件以及任何相关传感器数据源。然后&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











