







Neural Radiance Fields (NeRF) 是一种3D场景重建技术,用于从一组稀疏的2D图像创建高质量的3D模型。这一技术基于深度学习,通过训练一个神经网络来模拟场景的体积密度和颜色分布,实现在新的视角下渲染出高质量的3D图像。
NeRF的核心原理
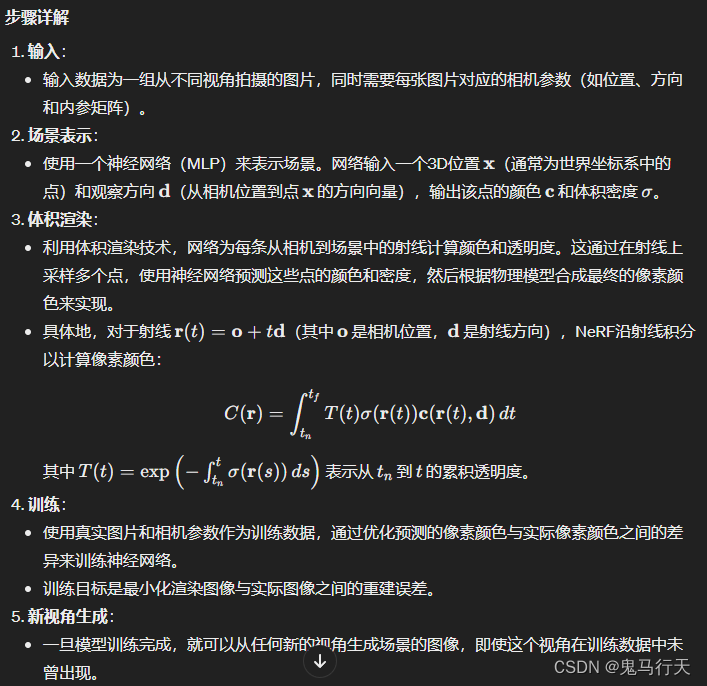
NeRF的核心在于使用一个全连接的神经网络(通常是多层感知机,MLP)来表示一个连续的体积场,这个体积场可以对每个空间位置的颜色和密度进行编码。通过这种方式,NeRF可以从多个视角捕获的图片中重建出场景的3D结构。
 下面是MLP的表示原理:
下面是MLP的表示原理:
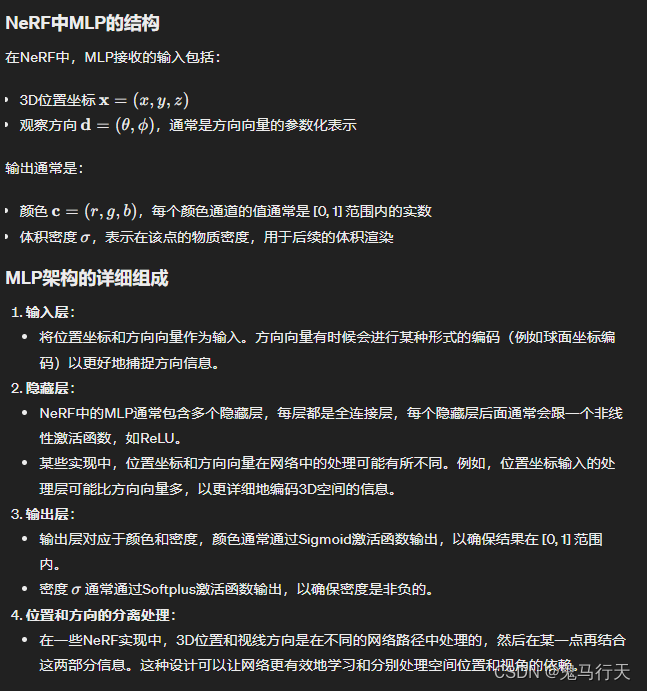
Neural Radiance Fields (NeRF) 中的多层感知机(MLP)是核心组件,用于从给定的3D坐标和视线方向预测场景中该点的颜色和体积密度。NeRF的MLP通常是相对简单的全连接网络架构,其设计旨在通过连续函数对3D场景进行编码。
 以下是一个简化的Python伪代码示例,展示了NeRF中MLP的基本结构,使用PyTorch框架:
以下是一个简化的Python伪代码示例,展示了NeRF中MLP的基本结构,使用PyTorch框架:
import torch
import torch.nn as nn
class NeRFMLP(nn.Module):
def __init__(self):
super(NeRFMLP, self).__init__()
self.fc_layers = nn.Sequential(
nn.Linear(5, 256), # 输入3个坐标 + 2个方向参数
nn.ReLU(),
nn.Linear(256, 256),
nn.ReLU(),
nn.Linear(256, 256),
nn.ReLU(),
nn.Linear(256, 4) # 输出RGB + 密度
)
self.sigmoid = nn.Sigmoid() # 颜色的Sigmoid激活
self.softplus = nn.Softplus() # 密度的Softplus激活
def forward(self, x):
output = self.fc_layers(x)
rgb = self.sigmoid(output[:, :3]) # 前三个输出为颜色
density = self.softplus(output[:, 3]) # 第四个输出为密度
return rgb, density
# 示例使用
model = NeRFMLP()
coords = torch.randn(10, 5) # 假设的10个输入,每个输入5维
rgb, density = model(coords)


















 3330
3330

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











