



 crazyflie2.x是一款受欢迎的开源室内无人机,因其硬件结构的完整性、强大的功能和可扩展性而备受青睐。它采用STM32F405 MCU和NRF51822通信芯片,支持无线充电和USB充电。无人机具备光流传感器实现悬停和壁障,可配合UWB或VR定位系统进行室内定位。此外,它还支持AI模块和PIX4固件,兼容ROS,适用于动态捕捉和通过python进行脚本控制。
crazyflie2.x是一款受欢迎的开源室内无人机,因其硬件结构的完整性、强大的功能和可扩展性而备受青睐。它采用STM32F405 MCU和NRF51822通信芯片,支持无线充电和USB充电。无人机具备光流传感器实现悬停和壁障,可配合UWB或VR定位系统进行室内定位。此外,它还支持AI模块和PIX4固件,兼容ROS,适用于动态捕捉和通过python进行脚本控制。
crazyflie2.x详细解说
对于国外这个开源室内无人机国内也算是逐渐青睐,尤其对于大学高校,像哈工大、北理、东南、华中科技等很多著名高校基于该无人机做项目开发。同样,国外更是火热很多年了,国内只是刚刚发现这个神器不久。下面我们就详细介绍一下为什么这套无人机这么火,它的优势有多大呢!
硬件结构

对于一款好的硬件平台即使再小也是麻雀虽小五脏俱全,如何评价一款硬件,有很重要的一点就是细节。细节才能体现一款产品的完整性,国外做的很好的产品都是如此。
-
该无人机硬件结构并非如何的突出,都是大家用起来最熟悉而且用的最多的MCU——STM32F405,对于一个开源无人机最重要的一部分就是方便开发、降低功耗,所以选择ST的MCU是比较合理的。
-
NRF51822是该无人机的通信芯片,很多人看到NRF第一反应就是蓝牙,没错蓝牙是无人机控制的一种方式,crazyflie无人机可以通过手机、平板等蓝牙app控制,还可以通过手机进行固件升级。当然大多数使用该固件的人大都不会使用蓝牙。NRF51822除了蓝牙还支持2.4g无线通信,官方配备一个PC-USB接收器,我们称之为PA,通过PA可以与无人机通信,PC上位机查看无人机状态,控制无人机,对无人机进行固件升级,可以通过一个游戏手柄连接PC进行无人机控制,很方便。
-
无线充电,对于一款无人机电池的使用性很重要,驰航是目前所有无人机还无法跨过的瓶颈,这款无人机配备了无线充电功能,不用每次充电还需拆开很麻烦。
-
USB充电,如果你觉得无线充电慢了点,那USB充电绝对是能够让你满足的,USB充电电流能够达到1A的充电电流,很快就能充满。
现在你可能发现这个无人机功能倒是齐全,不过更好的还在后面,这些功能仅仅提供使用的方便,功能的齐全,可扩展性才是该无人机无法让你拒绝的地方。
悬停加壁障+SLAM
悬停和壁障都是使用光流实现的。不过在向下光流增加一个小镜头,就实现了悬停的功能,壁障使用前后左右上光流实现全方位的壁障,测距长度达4m,对于室内操作使用单方向4m肯定是能满足的。
实现SLAM,使用全方位光流测试模块就可以很方便的使用起SLAM算法,对于想学习SLAM的人来说堪称完美。
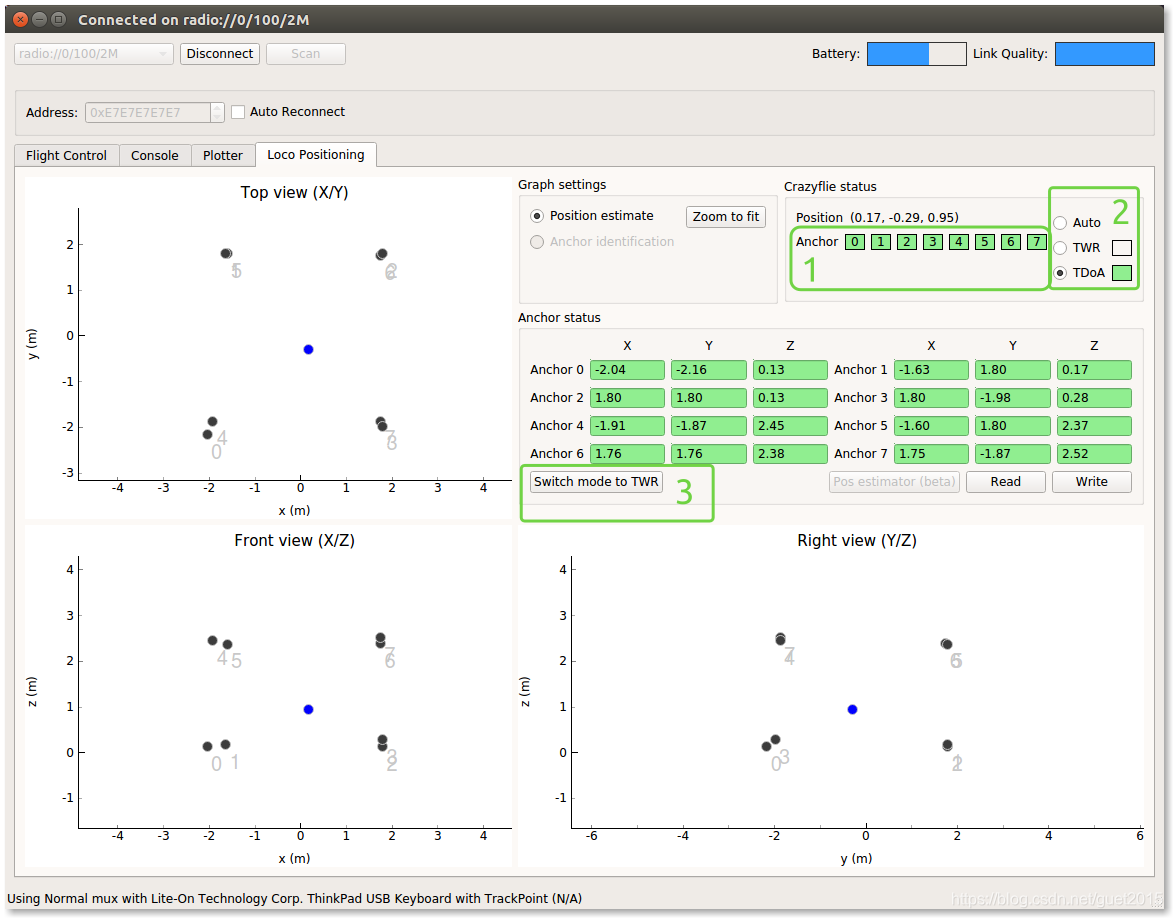
室内定位
首先室内定位是无人机一大特色,很多无人机目前达不到室内定位的功能,而我们的crazyflie2.x配备了很好的定位设备,目前流行的UWB超窄带脉宽技术,抗干扰强,使用该无人机做UWB的目的就是学习UWB算法,或者做无人机室内编队,使用该套件可以实现几十个甚至更多的无人机编队。
VR定位是一种高精度定位,该无人机配备了VR定位模块Lighthouse deck,特点就是定位精度高,达到mm级定位,对于实现高精度编队的使用就非常合适。
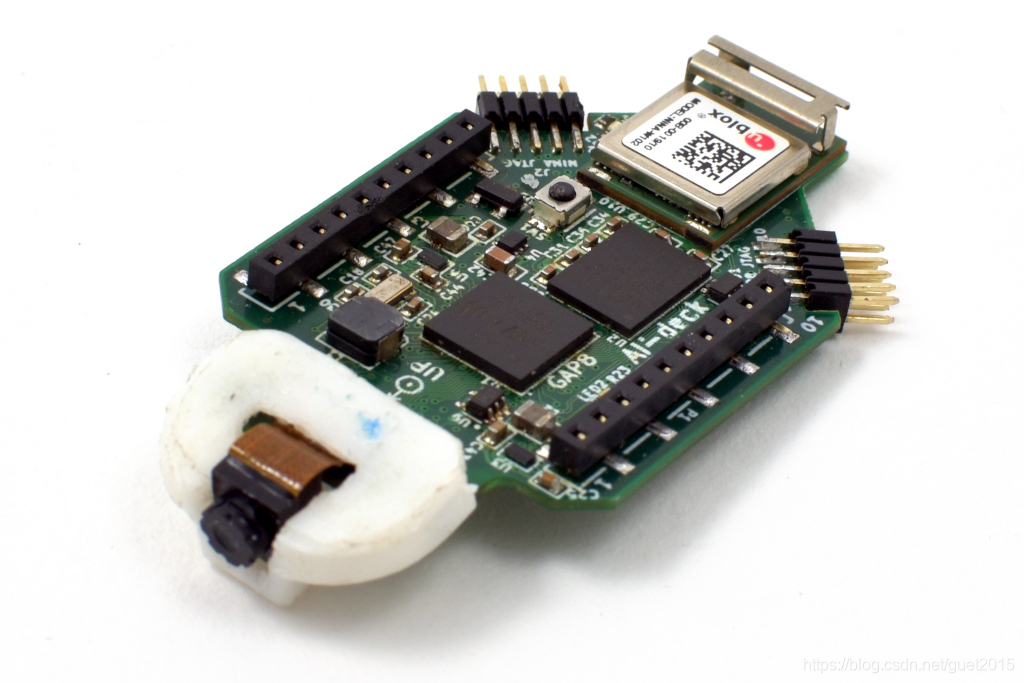
AI
当你还在羡慕黑镜里面杀人无人机的时候,肯定也希望自己的无人机能够实现人工智能,而且这是目前其他无人机套件无法比拟的,AI模块使用需要更高性能的AI处理器,更高的功耗,但是该无人机AI模块使用的是国外开源硬件构架,具有处理速度快,体积小,功耗低等特性。
PIX4固件支持
PIX4相信大家都比较熟悉,是国外著名的开源飞控,很多人学习无人机都基于该飞控。如果从网上购买飞控核心板来学习,还需要自己组装调试,对于飞行来说还需要折腾一下。然而crazyflie2.x已经有官方适配好的PIX4无人机固件,可以根据PIX官方教程直接刷新crazyflie固件,直接飞行,非常方便。关键是PIX4适配的官方固件,不需要再过多的折腾组装,而且该无人机小巧灵活,更加合适室内使用。
ROS
机器人系统,学习ROS的朋友需要一个合适的硬件平台来学习ROS,而且前面的编队有一种方式就是基于ROS做的,国外网站有详细的教程使用,比较方便。
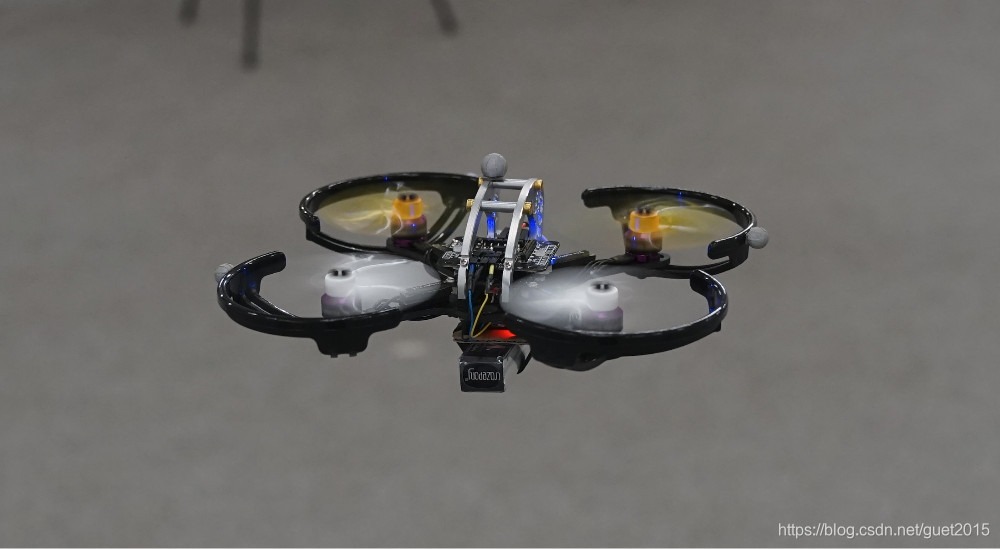
动态捕捉
其实动态捕捉本身不限于无人机,只是无人机基于动态捕捉系统实现定位和其他用途。crazyflie2.x推出由无人机专用的动态捕捉deck用于负载感应小球来实现高精度的定位。
python
最后说一下python,学习python的人现在很多,而crazyflie的PC控制正是基于python实现的。官方在PC端使用API调用的方式控制无人机,控制无人机完全实现脚本化,这也是该无人机在国外流行的原因之一,使用脚本增加无人机的扩展性,使用python你可以增加自己制作的模块,只需要把模块源码与python增加到官方api内就更够定制自己的无人方案。


















 4219
4219




 到【灌水乐园】发言
到【灌水乐园】发言







