



面向自动驾驶的79 GHz极化雷达传感器性能分析
摘要
在未来的自动驾驶汽车应用中,使用雷达传感器检测周围环境需要新的创新。线性偏振雷达系统检测精度不高,数据质量较低。因此,必须分析获取更多目标信息的新方法,其中最有前景的是采用圆极化测量。这些成像雷达的设计在开发阶段需满足特定标准。本文讨论了最重要的参数,包括典型雷达设计参数如距离门大小和角分辨率,以及最重要的极化天线参数交叉极化隔离度。通过实际的极化雷达图像和信号特性分析,详细展示了这些设计参数的影响。
一、引言
雷达传感器的最初目的是精确探测大量目标。迄今为止,已催生出广泛的雷达应用领域。对于每个应用领域,都需要满足特定的标准。所有必要的雷达性能要求必须在天线设计初期就予以考虑,因为天线设计对整个系统设计影响最大。天线增益包含在著名的雷达方程中,该方程定义了从目标返回的功率[1]。此外,天线阵列设计决定了波束成形过程、角分辨率以及所使用的天线通道数量。所需的天线性能必须在整个频率带宽范围内得到满足,而频率带宽又决定了距离门大小。还应考虑天线之间的串扰,以获得更精确的雷达数据,从而提高雷达图像质量。与线性信号相比,使用圆极化信号能够检测到更多的目标信息,原因在于不同极化方式(左旋圆极化(LHC)和右旋圆极化(RHC))可生成独立的雷达图像[2]。将这两种极化方式有效隔离是天线设计中的一项关键要求,这一能力由交叉极化隔离度这一特性来描述。采用圆极化测量技术的动力来自于未来汽车对雷达系统的新需求,例如从自动代客泊车到完全自动驾驶等高度自动化功能。面向车辆的新型雷达系统将在各种驾驶场景及所有天气和光照条件下实现目标分类[3]。此外,态势评估和轨迹规划(如快速情境更新和运动预测)正成为重要的功能[4]。
二、极化雷达图像
圆极化雷达采用紧凑型雷达算法,发射左旋圆极化(LHC)或右旋圆极化(RHC)信号,并根据目标表面结构接收相同或相反的信号极化。当目标反射次数为偶数时,极化状态不发生改变;而当反射次数为奇数时,极化状态会发生变化[2]。通常情况下,目标具有复杂的表面结构,导致单个距离门和角度门内出现多种极化效应的叠加,这些效应产生椭圆后向散射波。当圆极化同极化和交叉极化的幅度相等时,接收到的是线性偏振波。

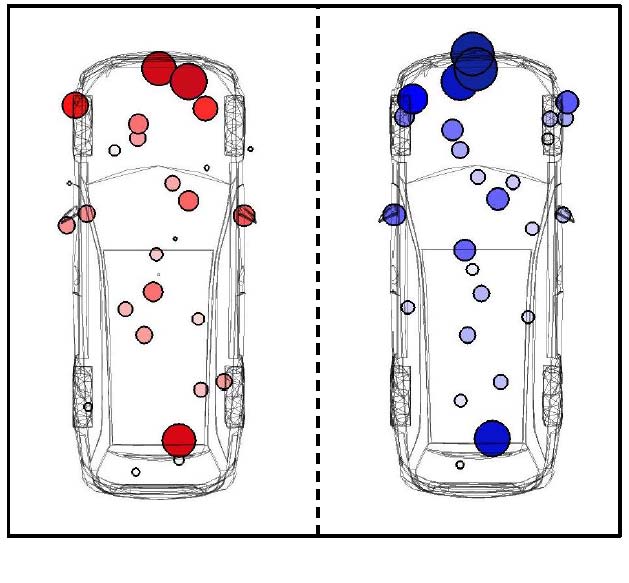
结果如图3所示,为同极化和交叉极化的两个独立雷达图像。接收信号的局部最大值以圆圈表示,其幅度由直径表示。同极化图像主要由双次反射信号构成,而交叉极化图像主要由单次反射信号构成。因此,在这两个图像中,反射中心的位置并不完全相同。结合同极化和交叉极化信息,可绘制出极化雷达图像,如图4所示。圆圈的轮廓颜色表示其来源,同极化为红色,交叉极化为蓝色。填充颜色对应于极化比,蓝色代表较强的交叉极化信号,橙色代表较强的同极化信号。

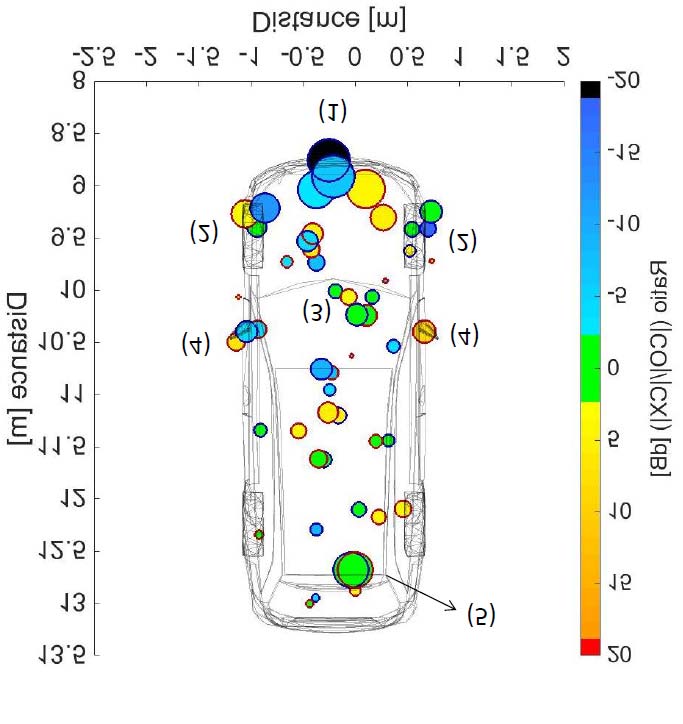
在绿色区域,信号接近线性极化。当比值低于‐20分贝时,填充颜色为深蓝色;当比值大于20分贝时,填充颜色为红色。关于图4所示的偏振图像,在前部(1)、前轮轮毂(2)、方向盘区域(3)、侧视镜(4)和后部(5)存在后向散射点。这些信号已根据同极化和交叉极化信号的数量以及比值的最大值、最小值和平平均值进行分析,结果列于表I中。
| 特性 | 数值 |
|---|---|
| 同极化极大值数量 | 27 |
| 交叉极化极大值数量 | 27 |
| 最大比值 [dB] | 8 |
| 最小比值 [dB] | -24 |
| 平均比值 [dB] | -5 |
这些结果中的检测次数在同极化和交叉极化下均为 27次。最大比值在左侧后视镜处为8,最小比值在车牌处为‐24dB。后者是车辆从前部测量时的典型情况。平均比值为‐5 dB,这意味着车辆整体具有更多的交叉极化特性。
III. 最重要参数的影响
在雷达设计初期,必须考虑不同的需求。只有当各个参数相互匹配时,才能实现周围环境的极化雷达成像和目标分类。因此,必须详细分析每个参数及其影响。以下章节概述了四个非常重要的极化雷达设计参数:距离门大小、角分辨率、交叉极化隔离度和视场角。
A. 距离门大小
距离门大小越小,不同极化效应的分离效果就越好。通过使用调频连续波(FMCW),距离门大小由频率带宽决定,距离门越小,所需的频率带宽越大[5]。因此,采用小距离门实现高分辨率功能需要更大的频率带宽,从而对信号调制器件和天线设计提出更高要求。例如,所有高频结构都必须在整个频率带宽范围内正常工作,交叉极化隔离度性能需在宽带范围内保持有效,且辐射特性不得出现波动。小距离门在长距离测量中会导致数据量增大,进而增加软件要求。但更多的数据量可实现对目标不同部分的精确区分,并获取大量用于目标分类所需的目标信息。图3和图4所示的雷达图像是在58 mm的距离门大小下生成的,对应的频率带宽为2.6 GHz。
B. 角分辨率
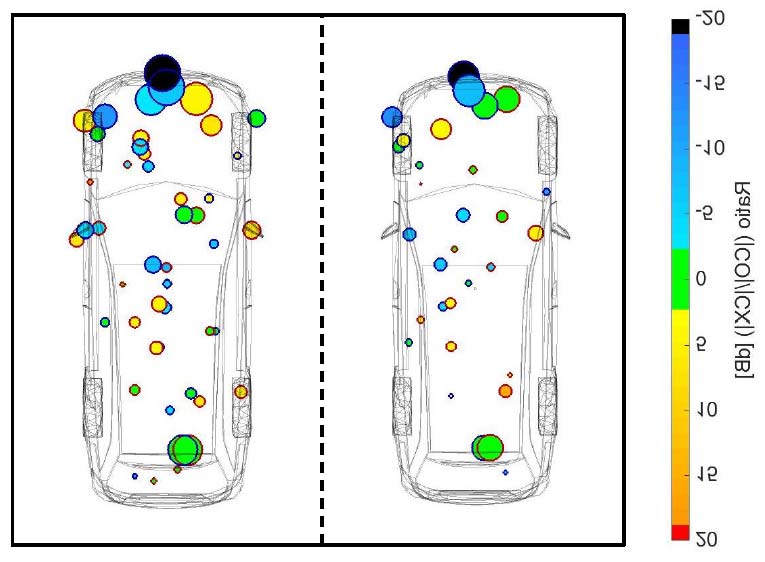
角分辨率越高,对目标的轮廓检测就越精确。角分辨率由天线孔径的大小决定,可用天线的半波束宽度来描述。在中远程模式下进行目标分类时,由于远距离处的波束宽度扩展,需要较小的波束宽度。这导致需要较大的孔径以及更多的天线通道和接收芯片。具有不同通道数量的雷达之间的差异如图5所示。左侧图像使用了2x16(16个左旋圆极化通道和16个右旋圆极化通道)通道系统,右侧图像使用了2x4(4个左旋圆极化通道和4个右旋圆极化通道)通道系统。
 ,2x4RX(右))
,2x4RX(右))
C. 交叉极化隔离度
交叉极化鉴别率(XPD)数值越大,采用圆极化信号的雷达相较于线极化信号的优势就越明显。实际上,所有信号都是椭圆极化的。当XPD较高时,极化椭圆趋近于完全圆形。发射的圆极化信号的质量由天线的XPD定义。在接收路径中,测量同极化与交叉极化之间的比值,所能接收到的最大比值与XPD水平相同,且该比值对观测角度有很强的依赖性。图6展示了在天线暗室中进行角反射器测量的角度扫描结果。
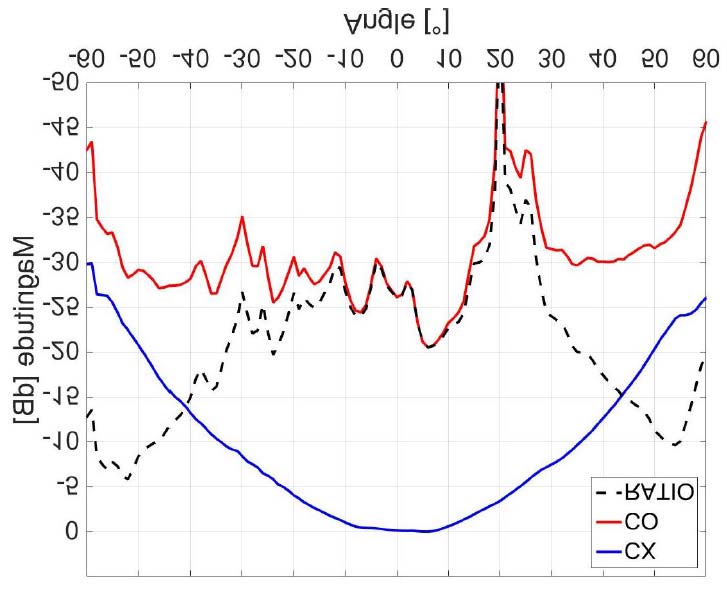
蓝色表示来自角反射器的交叉极化后向散射信号,红色表示同极化后向散射信号。黑色虚线是同极化与交叉极化结果之间的比值,即分贝单位下的差值。由于角反射器内部发生了奇数次(三次)反射,导致交叉极化幅度非常强。此外,角反射器是一种回溯反射器,意味着所有信号都会被反射回其源处。因此,角反射器是雷达测量的理想目标。总体而言,实验结果非常接近交叉极化鉴别率。同极化信号非常微弱且不稳定,因为角反射器本身不会产生双次反射,而且它对其环境非常敏感,例如天线暗室墙壁上的吸波材料[2]。只有当目标处存在此类信号时,才能在车辆测量中受益于高交叉极化鉴别率性能。根据表I,最小比值为‐24dB,这与图6中0 ◦处测得的比值非常接近。因此,对于某些车辆区域的极化比测量(例如车牌处强烈的交叉极化反射),高交叉极化鉴别率性能是必要的。
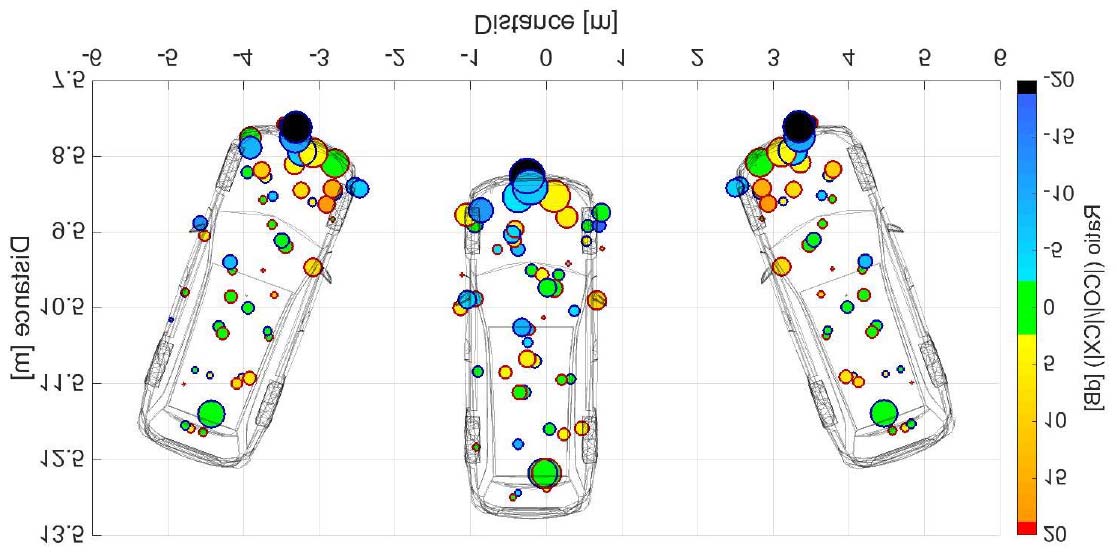
D. 视场角
在视场角(FOV)内,需要考虑不同的影响因素。除了上述讨论的设计参数外,还必须考虑目标方向。因此,图7显示了车辆在三个不同角度(0度、‐20度和20度)下的测量结果,其中后两个角度可用于评估偏振结果敏感性。在完全对称条件下,这些结果应相同。在图7中,‐20度和20度时的结果极为相似,例如车辆前部的图案几乎无差异,并且在这些角度下测量具有非常典型的特征。细微差异可在车辆的前缘和侧视镜处发现。总体而言,这些测量结果可被视为可靠的。表III展示了这些测量的信号分析结果。
| 特性 | 0◦ | 20◦ | -20◦ |
|---|---|---|---|
| 同极化信号数量 | 27 | 25 | 28 |
| 交叉极化信号数量 | 27 | 20 | 25 |
| 最大比值 [dB] | 8 | 19 | 19 |
| 最小比值 [dB] | -24 | -23 | -23 |
| 平均比值 [dB] | -5 | -4 | -4 |
角度测量之间的主要差异由最大比值给出,这些比值描述了高同极化特性。在0 ◦角度时,最大比值为8分贝;而在‐20 ◦和 20 ◦角度时,最大比值为19分贝,这是因为在这些角度下可能发生更多的双重反射,例如在车辆grille附近。其他性能差异体现在信号数量上。这些差异是由接近噪声水平的信号引起的。所有测量中的最大和平均比值均相似。
四、结论
本文对一种圆极化雷达传感器的性能进行了分析,以从车辆前部进行测量为例。结果得到了左旋圆极化(LHC)和右旋圆极化(RHC)两个独立的雷达图像。这些图像可以组合成一幅极化雷达图像,用于显示信号最大值。图中展示了极化的幅度、比值和来源。讨论了若干影响性参数,包括距离门大小、角分辨率、交叉极化鉴别率(XPD)和视场角(FOV)。较小的距离门大小对于从目标获取足够的极化数据是必要的。高角分辨率和大量接收通道对于精确定位车辆不同部位至关重要。交叉极化鉴别率值必须足够高,以检测到较高的信号比值,这对于模式识别非常重要。在视场角内,不同角度会接收到不同的模式,且在角度测量时最大比值增加。该信息可用于分析车辆的朝向。一个非常重要的方面是,所有设计参数必须精确匹配,以获得最优极化数据。为了构建自动驾驶的数据库,还需针对涉及多辆车辆、行人和各种物体的驾驶场景开展进一步的相关分析。


















 46
46

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









