



基于79 GHz极化雷达数据的自动驾驶特性
摘要
精确预测环境行为是自动驾驶面临的重要挑战。为此,本文展示了极化雷达技术的潜力。目标识别和精确轮廓检测等主要功能可实现对不同速度层的分析,从而更清晰地进行目标分类。另一项关键功能是路面状况测量,这对于计算安全速度至关重要,例如绕弯行驶时。文中通过实际雷达数据和信号分析的示例解释了这些极化特征。
关键词 —极化雷达,自动驾驶,微多普勒分析,路面状况测量
I. 引言
向实现自动驾驶的目标迈进,取代人类驾驶员意味着需要利用传感器来识别原本由人类驾驶员感官解决的各种情况。在此背景下,雷达成为自动驾驶传感器中的焦点。
其主要原因是雷达的物理原理能够在合理成本下提供独特的性能特性[1]。自动驾驶需要获取周围环境中目标的详细信息,包括目标尺寸、目标方向、运动预测和分类信息[1]。为了应对这一挑战,必须充分利用所有雷达信号信息。
对于许多应用而言,车辆的速度信息具有巨大潜力。目标除整体运动外的其他运动会在主多普勒频移周围产生多普勒调制,形成通常所说的目标微多普勒特征[2]。一种基于多普勒分布的全自动化方法可精确提取车轮的位置[3]。
此外,道路状况检测对自动驾驶至关重要。可靠识别护栏、碎石和草坪,有助于在弯道和雪地条件下实现紧急制动[1]。汽车雷达技术还可用于检测沥青路面上因水或冰导致的低摩擦区域[4]。本文使用一种圆极化79 GHz雷达对上述方法进行分析,该雷达针对左旋圆极化和右旋圆极化波各配备16个接收通道,如[5]所述。通过该雷达,结合实际雷达图像,阐述了包含速度与微多普勒分析以及路面状况测量的泊车场景,并解释了极化雷达技术的优势。
II. 极化雷达数据
使用圆极化进行环境分析具有两大优势。第一个优势是目标检测概率较高[5]。这是因为信号强度几乎不受散射体方向的影响,从而产生大量回波信号,有利于对目标进行清晰的轮廓分析。第二个优势是能够通过同极化和交叉极化极化通道[5]区分每个散射中心内射线反射次数的不同。这为区分复杂目标、车辆和环境提供了可能。这些特性在图1所示的典型驾驶场景——车辆停车操作中得到了展示。

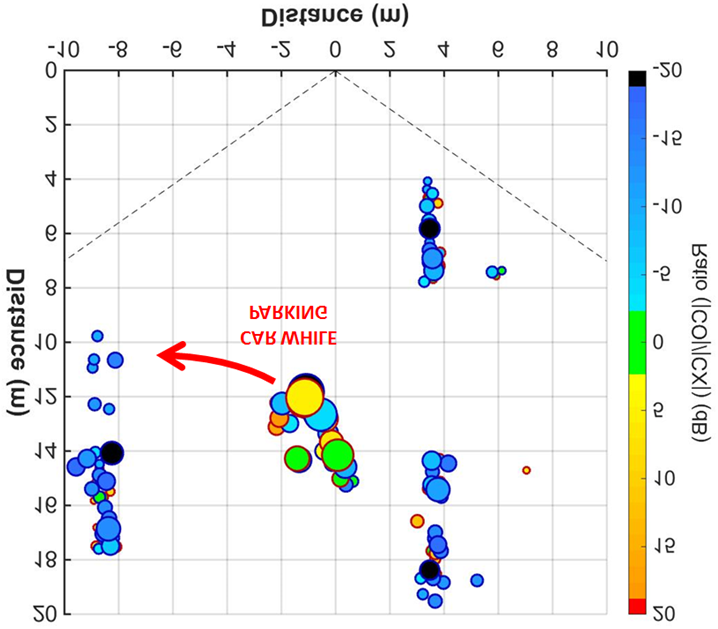
对应的极化雷达图像如图2所示。信号的局部极大值以圆圈表示,其直径对应于幅值大小。填充颜色代表同极化与交叉极化信号的比率。黄色、橙色和红色为由偶数次反射产生的同极化信号。蓝色和黑色表示交叉极化检测结果,对应奇数次反射。红色轮廓表示同极化的局部极大值,蓝色轮廓表示交叉极化的局部极大值。车辆在停车过程中可以很容易地被识别,因为存在同极化和交叉极化的特性。
包括典型L形和车轮位置在内的轮廓可以通过大量信号检测到。相比之下,环境主要表现为交叉极化特性,包括来自路缘石、右侧停车场入口以及左侧木栅栏和植被的接收信号。
III. 主速度分析
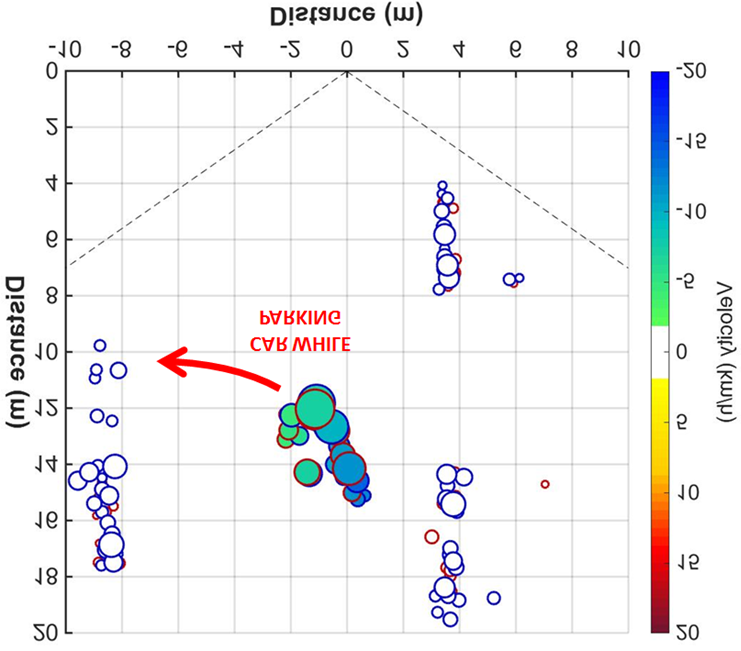
为每个后向散射点分配速度提供了额外的信息,因为来自车辆复杂表面的回波检测数量众多。对于此类复杂结构,极化波会产生多个后向散射点。图3显示了与图2所示极化雷达图像相同的雷达信号,但使用不同的填充颜色来显示停车时的相对速度。环境中静止的物体,如路缘、木栅栏和植被,以白色显示。车辆则呈现出不同的速度:汽车前部远离传感器,速度较低,约为5 km/h;而后部直接朝向传感器移动,速度约为12 km/h。
IV. 微多普勒分析
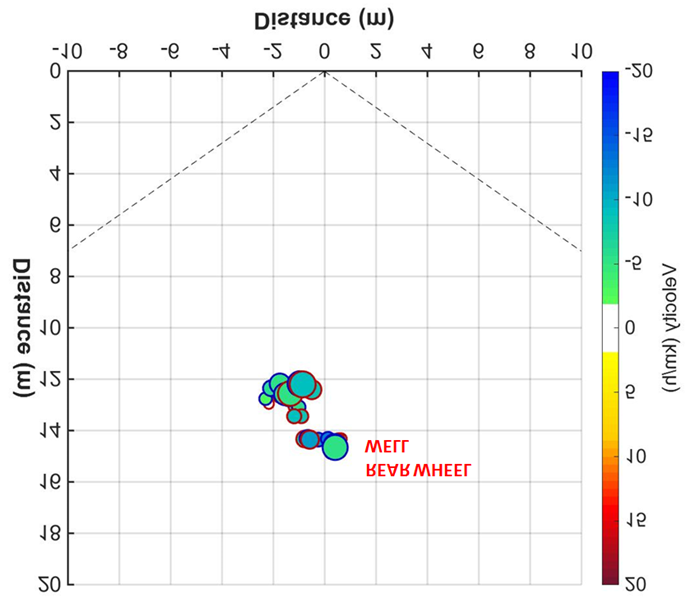
微多普勒分析是一种非常强大的方法。在图3中,我们只能看到每个像素内具有最强信号幅度的对象的速度,这些像素代表雷达图像中的距离和角度门。然而,对于每一个这样的像素,都会给出大量速度值。在图4中,我们能看到每个像素中第二强幅度的速度。这些同一像素内的不同相对速度可能是由于绕弯行驶或存在额外的运动部件(如车轮和车轴)引起的。在车轮处可以观察到一个特别有趣的现象。在那里,使用圆极化技术时,轮辋的运动会产生强烈的反射,因为运动中的轮辋包含了波的圆极性所覆盖的所有取向。这就是为什么我们在主速度之上还会叠加大量不同速度的原因。在表I中,我们可以看到位于左后轮(x轴上0.4m和y轴上14.64m)的一个距离门内不同幅度对应的速度。
| 极大值阶数 | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| 归一化幅度 | 1 | 0.78 | 0.45 | 0.37 | 0.14 |
| 速度(公里/小时) | -8.13 | -5.42 | -10.84 | -9.49 | -15.59 |
具有最高幅度的目标速度为-8.13 km/h,属于一阶极大值,包含在主速度分析中。第二强幅度对应的速度,在归一化幅度值为0.78处,已在图4的微多普勒图像中绘出。该强信号在图中以绿色圆圈表示,速度为-5.42 km/h。在三阶极大值处,归一化幅度仍为0.45,观测到的速度为-10.84 km/h。更低幅度下的其他速度出现在第四或第五阶极大值处,如表I所示。这些特性可用于分类算法中对车轮的识别。整体微多普勒为我们提供了车辆底部的印象。
对于其他目标,例如人类,当其手臂和腿部运动时也会产生微多普勒效应,可用于识别人体步态[6]。
V. 路面状况测量
极化技术的另一个非常重要的特性是能够测量路面状况,这对于自动驾驶而言是必不可少的。车辆的横向或纵向控制、加速和减速、吸收冲击以及确定最大速度都将基于路面状况信息。极化雷达图像可逐像素提供用于此类目的的特征图像。图5展示了路面状况测量的原理。极化雷达安装在车前部,对道路的一个区域进行分析。图6显示了具有低摩擦特性的沥青路,而图7则为该道路被分析部分对应的雷达图像。局部极大值再次以圆圈表示。左侧图像中的填充颜色代表比率,右侧图像中的填充颜色代表同极化与交叉极化信号之间的相位差。为了提供方位参考,在道路上放置了一个顶部装有角反射器的交通锥,其在雷达图像中表现为最强信号,极化比小于-20 dB,相位差约为±180°。对于每个像素,两种极化方式具有不同的传播路径。交叉极化信号仅在路面颗粒结构上发生一次反射,而同极化信号则发生两次反射。两种极化的幅度比和相位差中包含了路面状况信息。差分反射率提供了关于路面表单次反射或双次反射主导情况的信息,而差分相位则与两种极化方式的路径长度差相关。
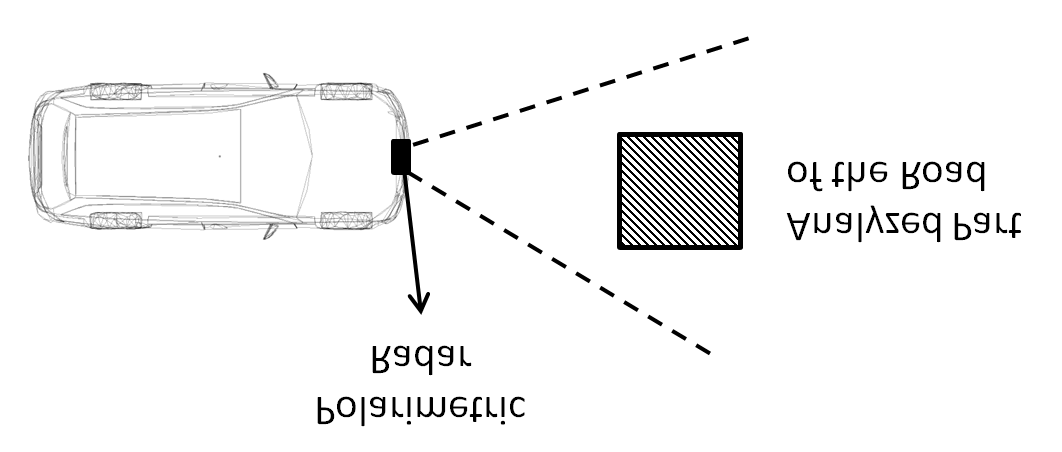

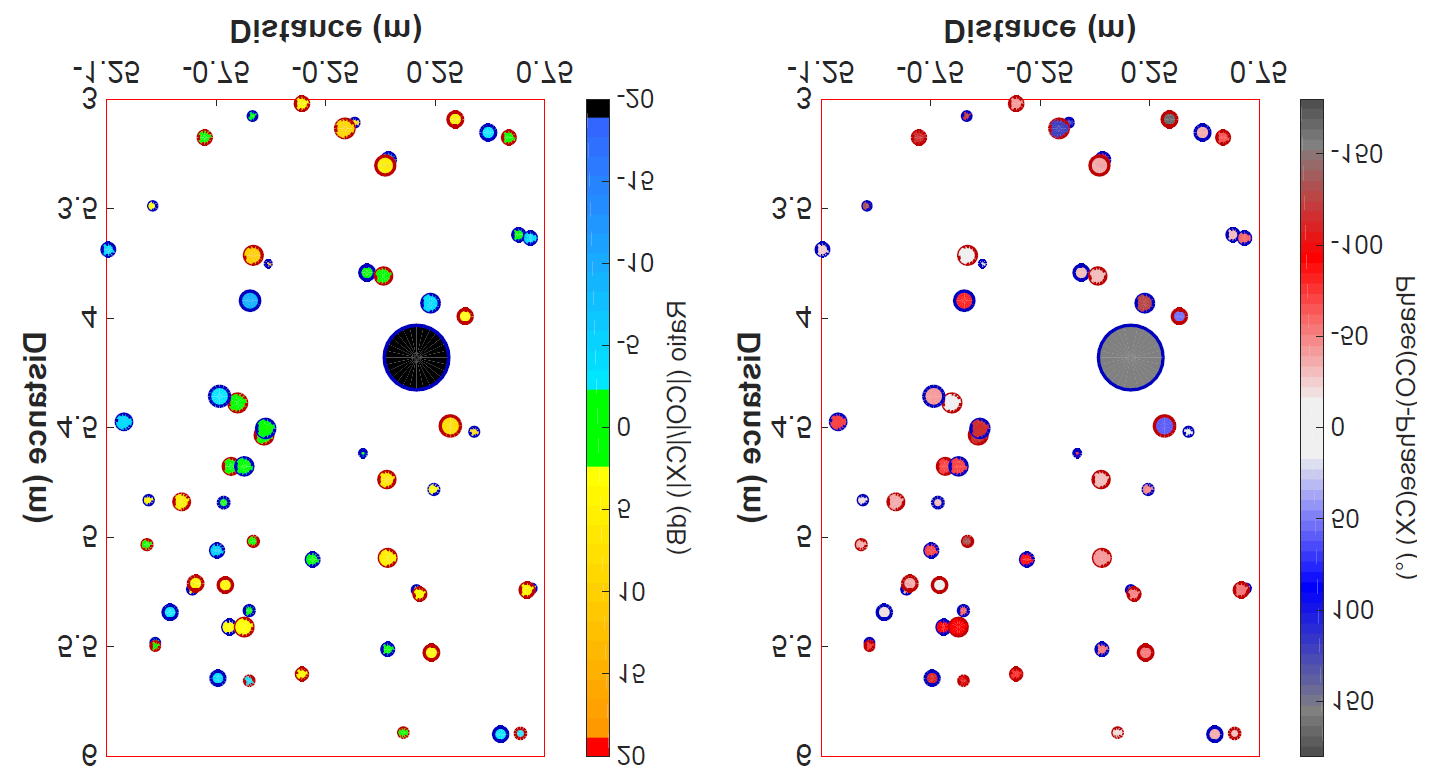
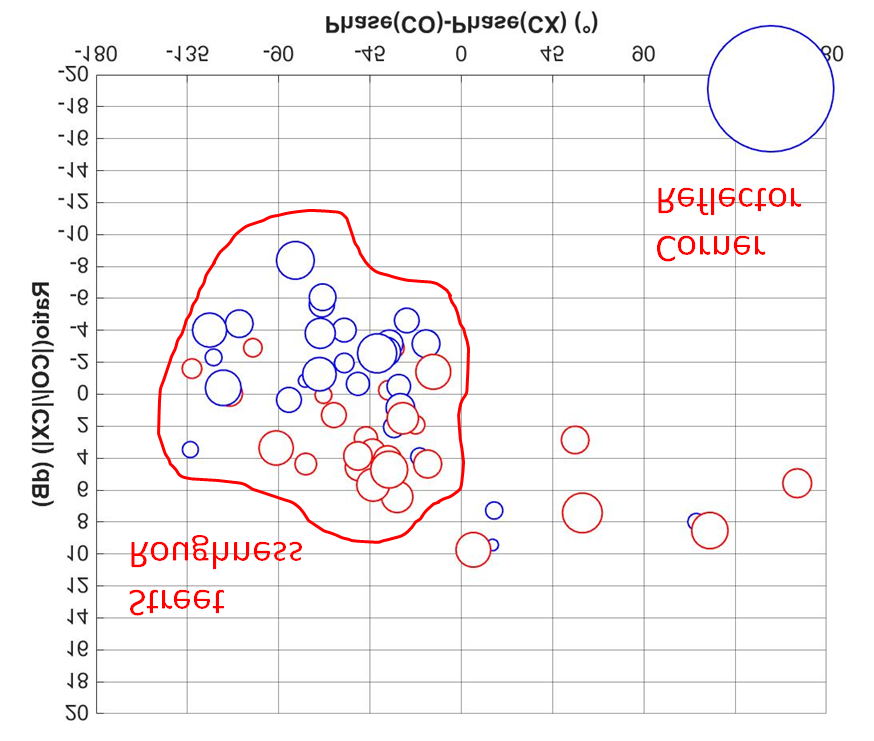
图8展示了沥青路的极化特性。x轴表示相位差,y轴表示图7中极化图像所有信号的比率,且不包含定位信息。所有来自路面的信号均可见于红色标出的聚类区域内。角反射器位于右下角,相位差约为180°。红色标记区域外的其他信号由道路上的其他物体(如小石子)产生。因此,当路面颗粒结构较细且摩擦力较低时,信号之间的相位和比率差异较小,从而产生聚类现象。这意味着图8中的大多数检测结果彼此之间非常接近。
在图9中我们可以看到一条碎石路,在图10中可以看到其对应的极化特性图像。来自碎石的信号以红色标出,为了便于定位,我们再次放置了一个角反射器。与沥青路相比,碎石的极化特性呈现分散状态,因为每一块碎石都有其独特的形状和位置,导致极化传播之间存在随机关系。

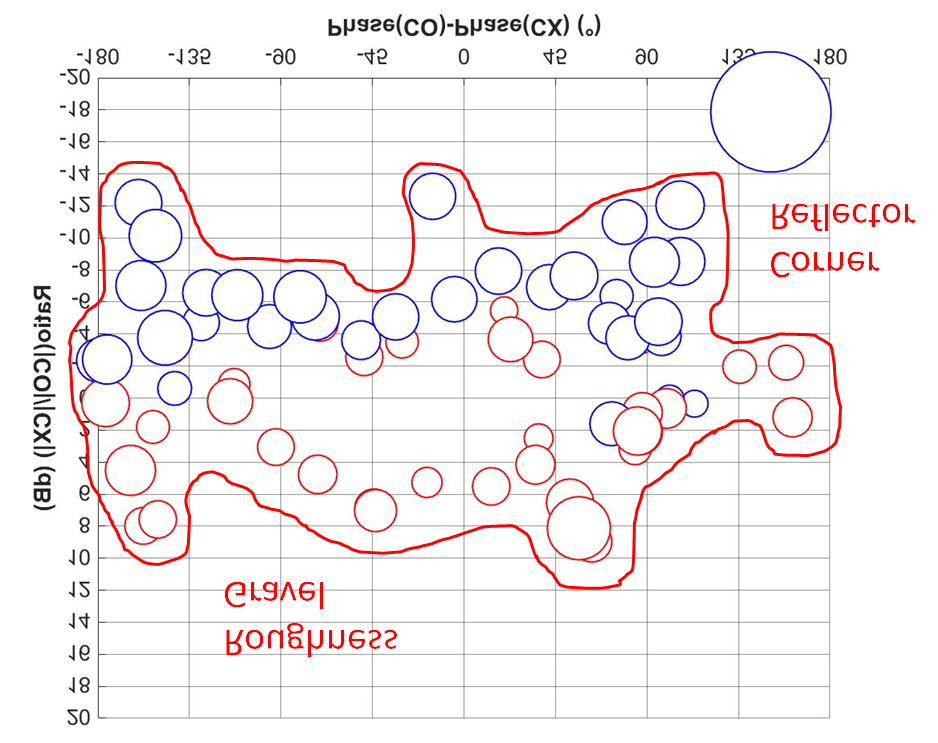
表2. 沥青与碎石路的比较
| 特性 | 沥青路 | 碎石路 |
|---|---|---|
| 信号数量 | 55 | 69 |
| 归一化平均幅度 | 0.47 | 1 |
| 平均相位差 | -60.76° | -1.44° |
| 标准差 相位差异 | 32.56° | 100.38° |
| 平均比值 (dB) | 0.21 | -0.79 |
| 标准差比值 (dB) | 3.5 | 5.53 |
沥青路与碎石路的特性对比见表II。此处展示了一些可用于道路状况分类的特性。沥青路上的检测点数量为55,碎石路上为69。这是由于碎石内部存在大量后向散射点所致。碎石路的归一化幅度更高,因为碎石形状具有较高的雷达散射截面。对于沥青路,平均相位差为-60.76°,对应的标准差为32.56°,这意味着相位归因存在聚类效应。对于碎石路,平均相位差为-1.44°,标准差约为100.38°,这表明这些信号是完全随机分布的。此外,沥青路的平均比率也表现出聚类效应,其值为0.21 dB,标准差为3.5 dB,而碎石路的平均比率为-0.79 dB,标准差为5.53 dB。每种路面都具有其自身的特征性极化特性模式。通过该方法,可以识别各种摩擦系数、水膜厚度、滑水情况以及其他道路状况,如冰雪覆盖[7]。
VI. 结论
本文介绍了基于圆极化的极化雷达技术在自动驾驶功能方面的潜力。讨论了三个非常重要的领域:分类、多普勒分析和道路状况测量。每个领域都有大量应用,且有许多其他方面需要进一步分析。本文基于高度集成传感器原型所测得的极化数据和特征,深入探讨了该技术的潜力。
在分类方面,极化图像能够区分复杂目标(如车辆)与道路旁的其他目标(如植被或护栏)。基于圆极化波,我们检测到大量散射中心,从而实现对速度和微多普勒的详细分析。例如,在轮拱处,可在同一距离门内测量到具有不同速度的信号,这有助于目标识别。此外,圆极化技术提供了一种高效的道路状况测量方法。通过比较道路上不同区域的极化模式特性,可分析不同路面和摩擦系数。对于所有这些特征,均可生成针对物体、物体局部区域或道路状况的特征极化图像。这些极化信息可用于分类算法中,例如通过机器学习方法进行训练。因此,极化雷达技术有望成为实现自动驾驶所需功能的关键因素。

















 299
299

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









