









一、刚体的惯性张量
在单自由度系统中,常常要考虑刚体的质量。对于定轴转动的情况,经常用到惯量矩这个概念。对一个可以在三维空间自由运动的刚体来说,可能存在无穷个旋转轴。在一个刚体绕任意轴做旋转运动时,我们需要一种能够表征刚体质量分布的方法。在这里,我们需要引入惯性张量,它可以被看做是对一个物体惯量的广义度量。
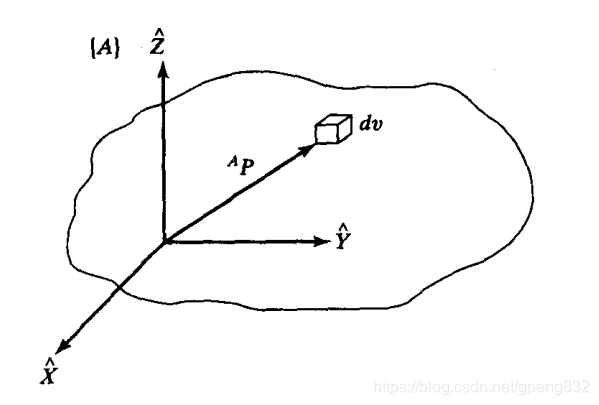
现在我们定义一组参量,给出刚体质量在参考坐标系中分布的信息。下图表示一个刚体,坐标系建立在刚体上。惯性张量可以在任何坐标系中定义,但一般在固连于刚体上的坐标系中定义惯性张量。
坐标系{A}中的惯性张量可用3*3矩阵表示如下:
AI=[Ixx−Ixy−Ixz−IxyIyy−Iyz−Ixz−IyzIzz]{^{A}\textrm{I}=\begin{bmatrix}
I_{xx} &-I_{xy} &-I_{xz} \\
-I_{xy} &I_{yy} &-I_{yz} \\
-I_{xz} &-I_{yz} & I_{zz}
\end{bmatrix}}AI=⎣⎡Ixx−Ixy−Ixz−IxyIyy−Iyz−Ixz−IyzIzz⎦⎤
矩阵中各元素为:
Ixx=∫∫∫V(y2+z2)ρdvI_{xx}=\int\int\int_{V}(y^2+z^2)\rho dvIxx=∫∫∫V(y2+z2)ρdv
Iyy=∫∫∫V(x2+z2)ρdvI_{yy}=\int\int\int_{V}(x^2+z^2)\rho dvIyy=∫∫∫V(x2+z2)ρdv
Izz=∫∫∫V(x2+y2)ρdvI_{zz}=\int\int\int_{V}(x^2+y^2)\rho dvIzz=∫∫∫V(x2+y2)ρdv
Ixy=∫∫∫V(xy)ρdvI_{xy}=\int\int\int_{V}(xy)\rho dvIxy=∫∫∫V(xy)ρdv
Ixz=∫∫∫V(xz)ρdvI_{xz}=\int\int\int_{V}(xz)\rho dvIxz=∫∫∫V(xz)ρdv
Iyz=∫∫∫V(yz)ρdvI_{yz}=\int\int\int_{V}(yz)\rho dvIyz=∫∫∫V(yz)ρdv
式中刚体由单元体dvdvdv组成,单元体密度为ρ\rhoρ,每个单元体的位置由矢量AP=[xyz]T^{A}\textrm{P}=\begin{bmatrix} x&y&z \end{bmatrix}^{T}AP=[xyz]T确定。
二、惯性张量的物理意义
当刚体绕定点转动时,刚体的动量矩为:
L=∑miri×(w×ri)L=\sum m_{i}r_{i}\times (w\times r_{i})L=∑miri×(w×ri)
将上式展开写成矩阵的形式是:
[LxLyLz]=[∑mi(yi2+zi2)−∑mixiyi−∑mixizi−∑mixiyi∑mi(xi2+zi2)−∑miyizi−∑mixizi−∑miyizi∑mi(xi2+yi2)][wxwywz]\begin{bmatrix}
L_{x}\\
L_{y}\\
L_{z}
\end{bmatrix}=
{\begin{bmatrix}
\sum m_i(y_i^2+z_i^2) &-\sum m_ix_iy_i &-\sum m_ix_iz_i \\
-\sum m_ix_iy_i &\sum m_i(x_i^2+z_i^2) &-\sum m_iy_iz_i \\
-\sum m_ix_iz_i &-\sum m_iy_iz_i & \sum m_i(x_i^2+y_i^2)
\end{bmatrix}}\begin{bmatrix}
w_x\\
w_y\\
w_z
\end{bmatrix}⎣⎡LxLyLz⎦⎤=⎣⎡∑mi(yi2+zi2)−∑mixiyi−∑mixizi−∑mixiyi∑mi(xi2+zi2)−∑miyizi−∑mixizi−∑miyizi∑mi(xi2+yi2)⎦⎤⎣⎡wxwywz⎦⎤
右侧3×3矩阵中的求和形式与第一部分中的积分形式是等价的。Li{L_i}Li表示刚体绕定点旋转时对每个分坐标轴的动量矩。
参考文献:
John Craig 《机器人学导论》 机械工业出版社 2006
洪国维 《惯性张量的物理意义》

















 794
794

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









