





本篇博文主要介绍如何在ROS上面创建机器人小车,因不明白rviz的使用,在多次成功创建后也无法显示,文末将附上该问题的解决方法。
一、在终端中进入catkin_ws/src/目录下,运行如下命令创建包;
catkin_create_pkg smartcar std_msgs rospy roscpp urdf
二、进入smartcar目录下,并创建urdf目录(命令:mkdir urdf),进入urdf目录并创建smartcar.urdf,粘贴如下代码:
<?xml version="1.0"?>
<robot name="smartcar">
<link name="base_link">
<visual>
<geometry>
<box size="0.25 .16 .05"/>
</geometry>
<origin rpy="0 0 1.57075" xyz="0 0 0"/>
<material name="blue">
<color rgba="0 0 .8 1"/>
</material>
</visual>
</link>
<link name="right_front_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="right_front_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="right_front_wheel"/>
<origin rpy="0 1.57075 0" xyz="0.08 0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="right_back_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="right_back_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="right_back_wheel"/>
<origin rpy="0 1.57075 0" xyz="0.08 -0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="left_front_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="left_front_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="left_front_wheel"/>
<origin rpy="0 1.57075 0" xyz="-0.08 0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="left_back_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="left_back_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="left_back_wheel"/>
<origin rpy="0 1.57075 0" xyz="-0.08 -0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="head">
<visual>
<geometry>
<box size=".02 .03 .03"/>
</geometry>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
</link>
<joint name="tobox" type="fixed">
<parent link="base_link"/>
<child link="head"/>
<origin xyz="0 0.08 0.025"/>
</joint>
</robot>
三、返回smartcar目录,创建launch目录,进入该目录下创建display.launch文件,并粘贴如下代码:
<launch>
<arg name="model" />
<arg name="gui" default="False" />
<param name="robot_description" textfile="$(find smartcar)/urdf/smartcar.urdf" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" >
</node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find urdf_tutorial)/urdf.rviz" />
</launch>
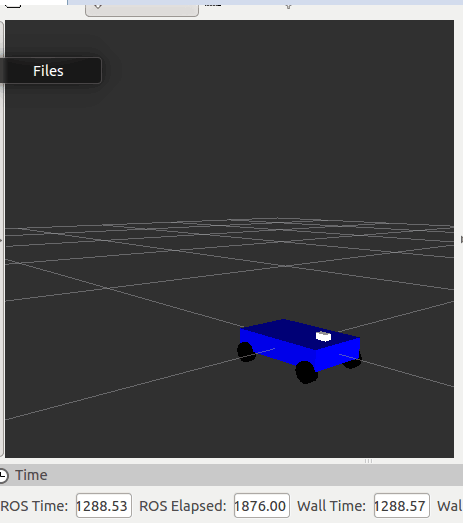
四、运行如下命令即可看到创建的机器人小车:
roslaunch smartcar display.launch gui:=true
创建小车模型已经有很多非常优秀的博文了,因此本篇博文重点为解决如下问题:
若在运行命令后,rviz显示如下所示:
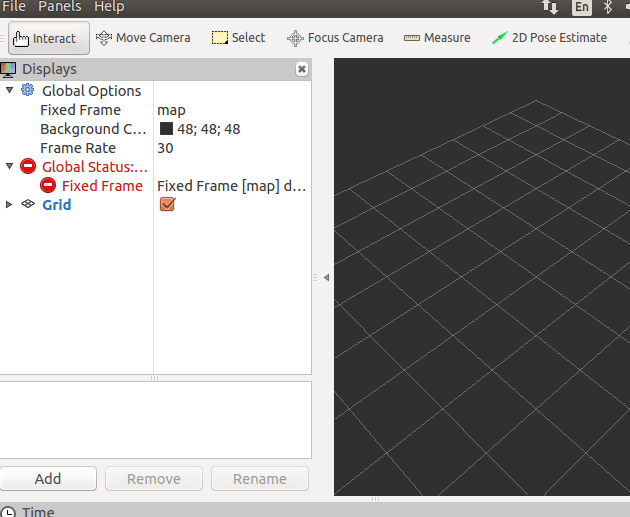
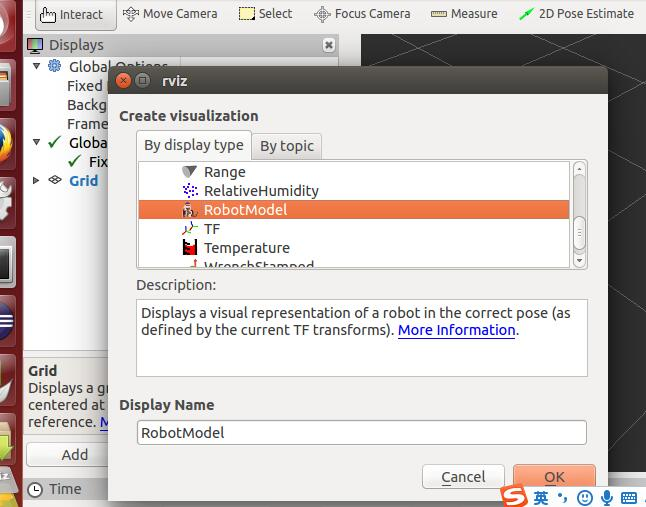
则可按如下步骤进行解决:
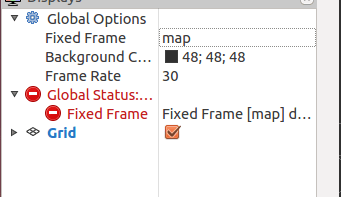
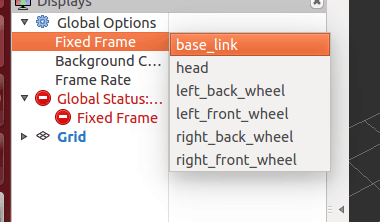
一、点击map位置,选择base_link;
二、点击下方Add按钮,添加RobotModel
欢迎关注我的公众号:
编程技术与生活(ID:hw_cchang)




















 3178
3178

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











