




 本文详细介绍了SIFT、Harris、FAST等图像特征检测方法,包括其原理、实现过程及OpenCV中的应用。重点讲解了SIFT的尺度不变性、关键点定位、方向赋值和特征描述,以及匹配策略。同时,提到了量化匹配度在图像分类中的应用思路。
本文详细介绍了SIFT、Harris、FAST等图像特征检测方法,包括其原理、实现过程及OpenCV中的应用。重点讲解了SIFT的尺度不变性、关键点定位、方向赋值和特征描述,以及匹配策略。同时,提到了量化匹配度在图像分类中的应用思路。
图像特征
本章主要介绍一些特征点的理论及opencv如何调用,如有疏漏望不吝赐教,对你如果有帮助,不胜荣幸。xue.2018.4.9
注: Opencv出现的特征点检测原理可以从如下链接了解
1、OpencvTutorial>>feature2d module.2D Features framework
2、OpencvTutorial>>OpenCV-Python Tutorial>>Feature Detection and Description
目录:
环境:
Win10.x64
VS2015
Opencv3.4
注: Opencv-contrib搭建参考连接
1.0 SIFT(Scale-invariant feature transform)
尺度缩放,旋转,亮度变化具有不变性
应用范围:物体识别,机器人地图感知与导航,影像缝合,3D模型建立,手势识别,影像追踪和动作对比。
1.1 参考文献
原理参考:
1,SIFT算法详解
2,SIFT特征提取分析
3. SIFT原理与源码分析:DoG尺度空间构造
4.Introduction to SIFT (Scale-Invariant Feature Transform)
5.sift
1.2 尺度空间和多分辨率
尺度空间:
1,考虑图像在多尺度下的描述,获取感兴趣物体的最佳尺度。
2,如果在多尺度下都可以检测出相同关键点,即具有尺度不变性。
3,图像的尺度空间表达->就是图像在所有尺度下的描述。
尺度空间表达 采用高斯核
1,高斯核实唯一可以产生多尺度空间的核。
2,高斯卷积只是表现尺度空间的一种形式。
金字塔多分辨率
图像金字塔一般包含两个步骤:
1,低通滤波器平滑图像
2,对平滑图像进行降采样。
尺度空间表达是由不同高斯核平滑卷积得到,在所有尺度上有相同的分辨率
金字塔多分辨率表达每层分辨率减少固定比率
1.3 Scale-space Extrema Detection
Log(Laplace of Gaussian) pyramid 代价高,SIFT采用了高斯差分(Difference of Gaussian)近似LOG。
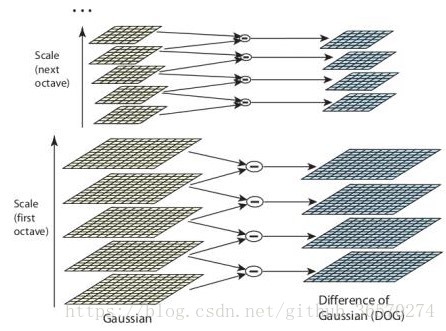
注: 每个octave含有相同分辨率,不同高斯核 σ σ 和 kσ k σ 。
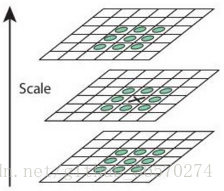
注: 建立DOG后,一个像素(上图中黑X),同其周围8个像素点,和上下不同尺度9个像素点作对比,如果是局部极值,则说是当前尺度空间的特征点
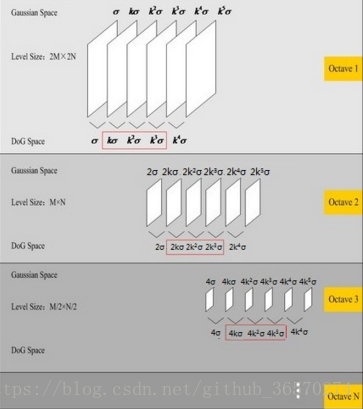
不同的高斯尺度组
根据经验建议:octaves =4,number of scale levels =5, σ=1.6 σ = 1.6 , k=(√2) k = ( 2 )
1.4Keypoint Localization(精确化)
 1,移除弱极值点:当获取特征点后,需要对其进行提炼以获得更精确的结果(上述的极值点都是在离散空间进行搜索的)。通过泰勒公式对DOG进行展开,滤除极值小于contrastThresholdValue的情况。
原文中contrastThresholdValue =0.04
2,删除边缘效应:DOG对边缘有较强的响应,落在边缘的点也不是稳定的特征点。通过2*2 hessian matrix计算主要轮廓。
其中令 α=λmax α = λ m a x , β=λmin β = λ m i n ;
Tr(H)=Dxx+Dyy=α
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 318
318




 到【灌水乐园】发言
到【灌水乐园】发言







