




-
Service的作用
- Service作为Android四大组件之一,在每一个应用程序中都扮演着非常重要的角色。
- 它主要作用:处理后台一些耗时的逻辑,或者去执行某些需要长期运行的任务。
- 必要的时候:可以在程序退出的情况下,让Service在后台继续保持运行状态。
-
Service生命周期以及开启关闭Service方式
-
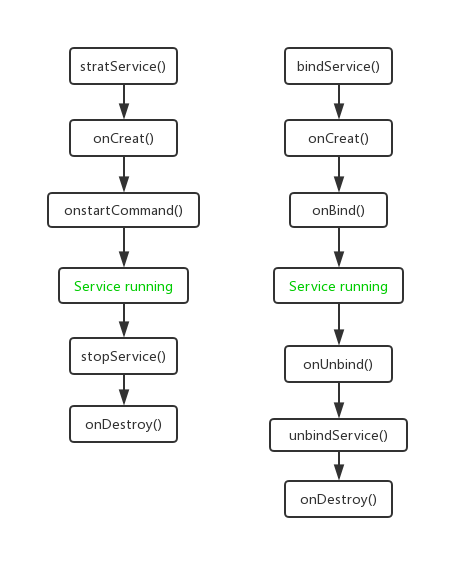
第一种方式:通过StartService启动Service,stopService停止Service
onCreate()
首次创建服务时,系统将调用此方法执行一次,如果服务已在运行,则不会调用此方法。
onStartCommand()
如果多次调用startService()方法,那么Service的onStartCommand()方法也会多次调用。onStartCommand()方法很重要,我们在该方法中根据传入的Intent参数进行实际的操作。
onDestory()
服务将被销毁时,系统将调用此方法 -
第一种方式:通过bindService启动Service,unbindService停止Service
onCreate()
首次创建服务时,系统将调用此方法执行一次,如果服务已在运行,则不会调用此方法。
onBind()
在此方法的实现中,必须返回 一个IBinder 接口的实现类,供客户端用来与服务进行通信。
onUnbind()
解除客户端用来与服务进行通信。
onDestroy()
服务将被销毁时,系统将调用此方法
-
-
Service 与 Thread 的区别
Service是android的一种机制,他是一种进程。
Thread是线程。
复习Android之Service的一种情怀
最新推荐文章于 2024-04-19 13:52:26 发布

















 2556
2556

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









