



01 Web基础-静态网页
新中地GIS开发特训营2506期,上周刚刚开班,同学们即将开启一段“从0到三维GIS开发工程师“的探索之路。我们先来看下0基础的同学都学些什么内容吧!
注册表格:
静态网页文章展示页面:
技能熟练度进度条展示页面:
带背景图的汽车展示页面:
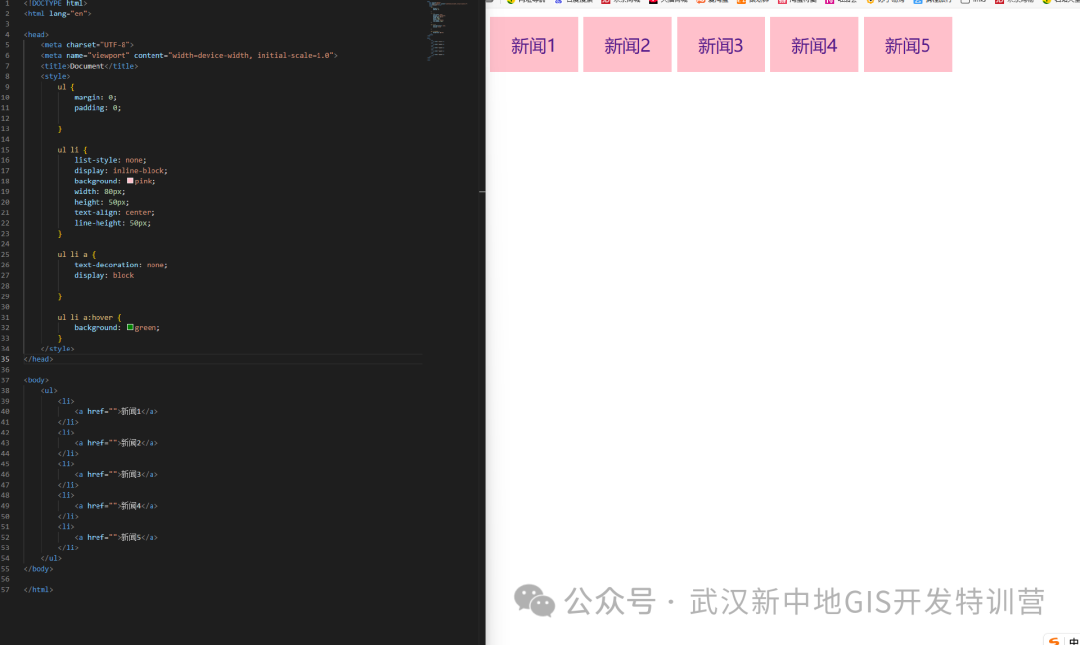
简易的新闻导航栏:
古诗词赏析的静态网页:

新中地GIS开发特训营,第一堂课,老师就会让大家做记录,从刚开始接触编程,到日后成为独当一面的GIS开发工程师,随手养成记录的习惯。
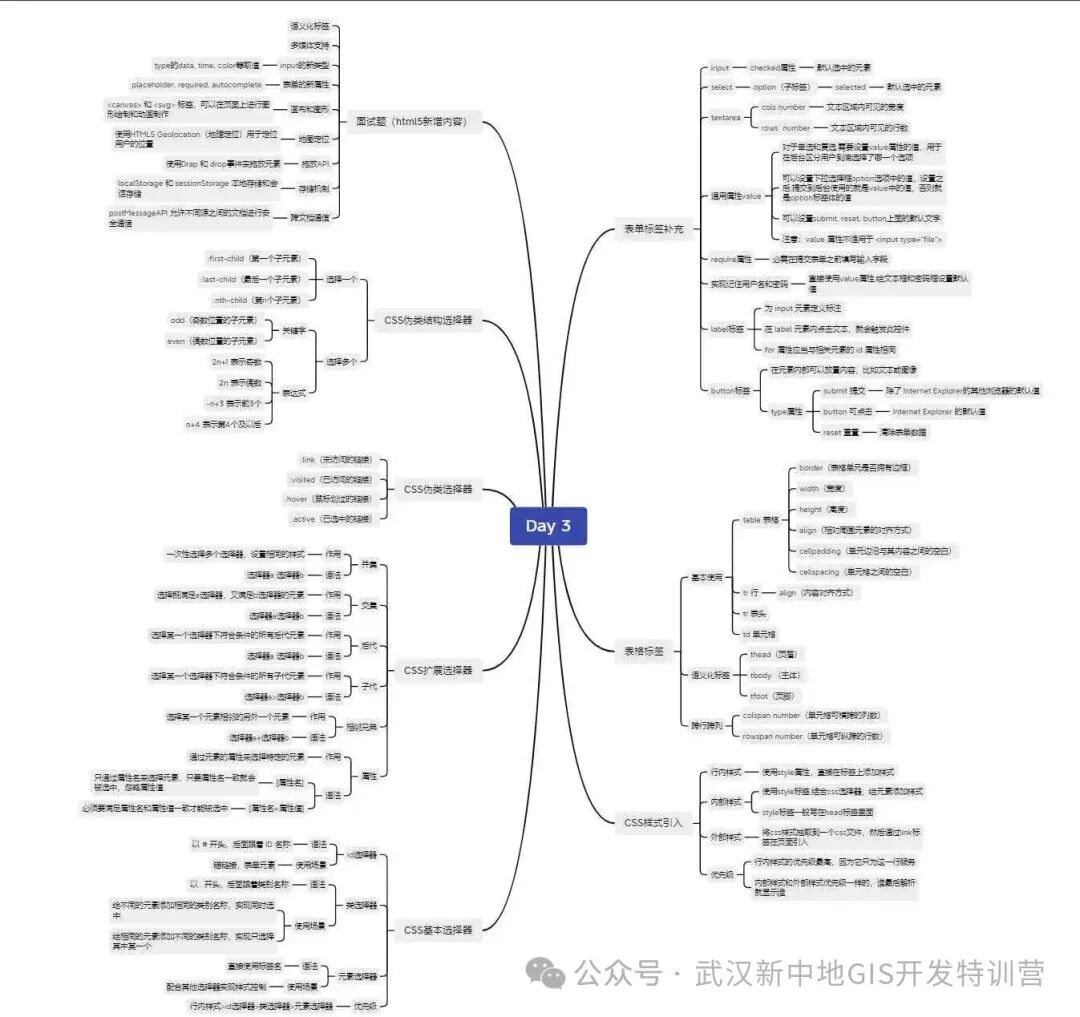
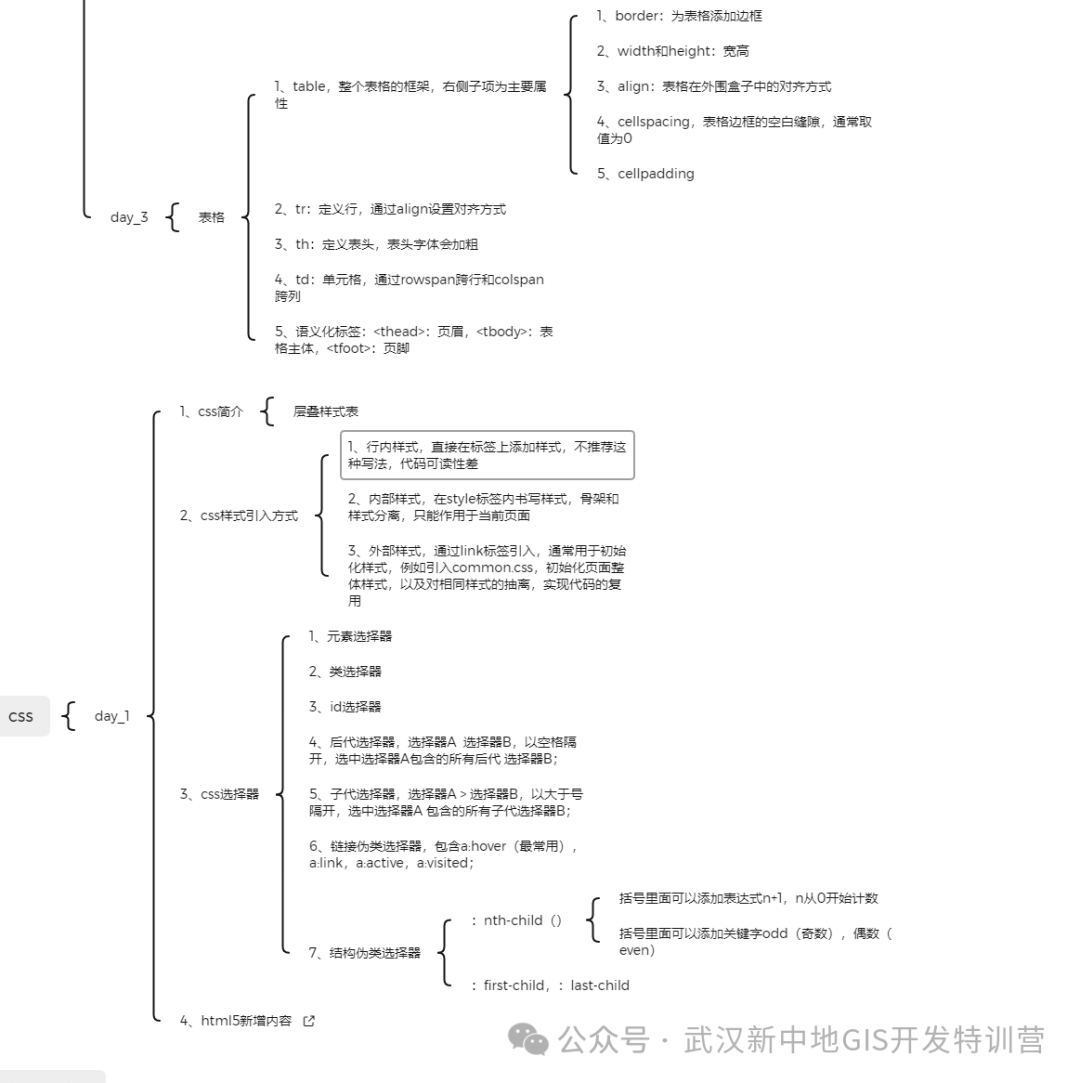
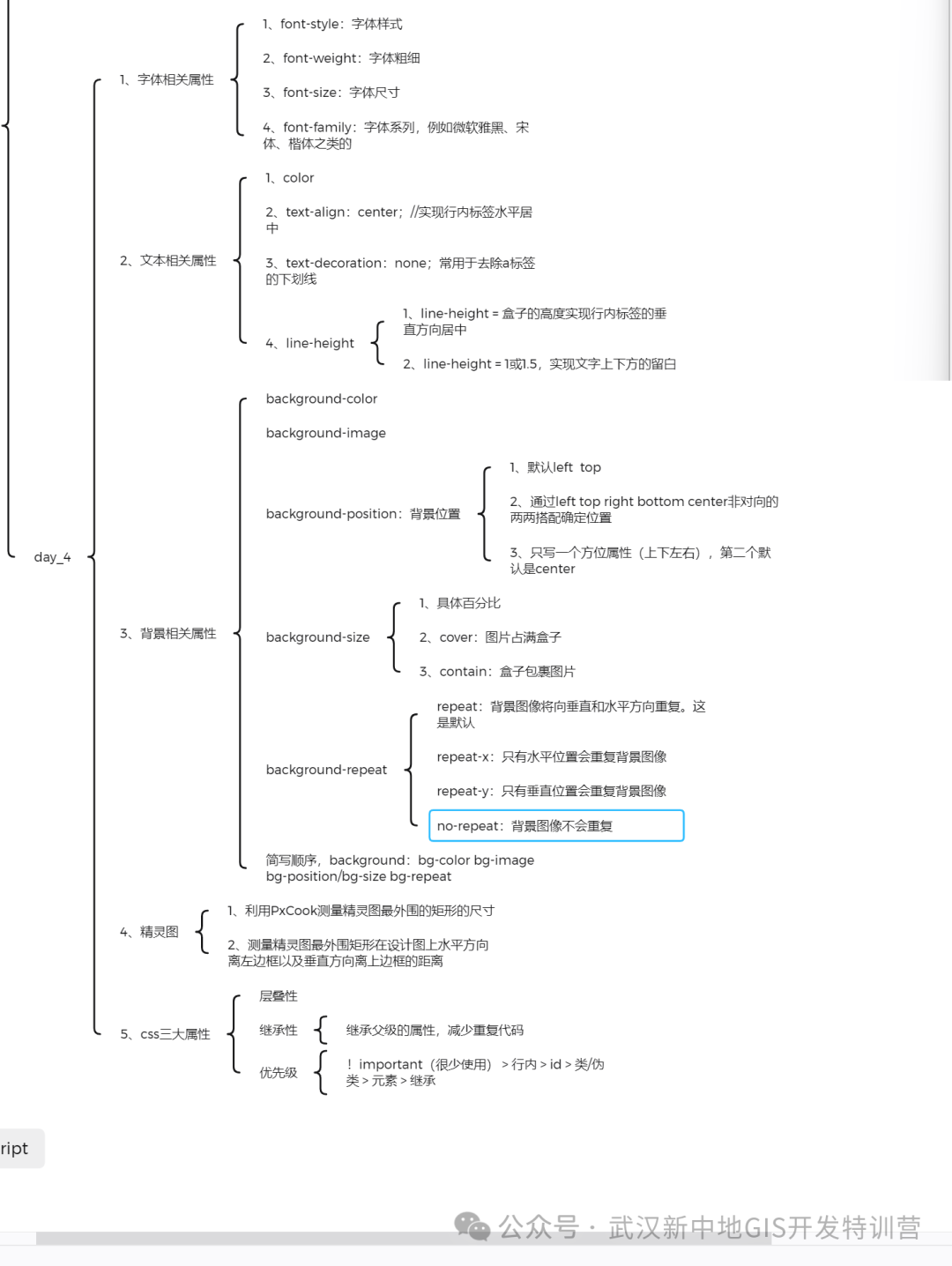
每一堂课都把重点内容梳理出来,日积月累形成自己的知识体系,为后续就业以及自我提升时留下最佳素材。下面是2506期同学们的html学习笔记:

02 Web进阶-VUE组件式开发
2505期同学们刚刚结束前端基础内容,本周进入前端进阶,也就是vue的学习,本周目前还在熟悉过程中,没有可展示的案例,下周我们将给大家展示更多案例。
我们来看下前几周同学们制作的王者荣耀英雄图标网页:

03 WebGIS二维阶段-openlayers
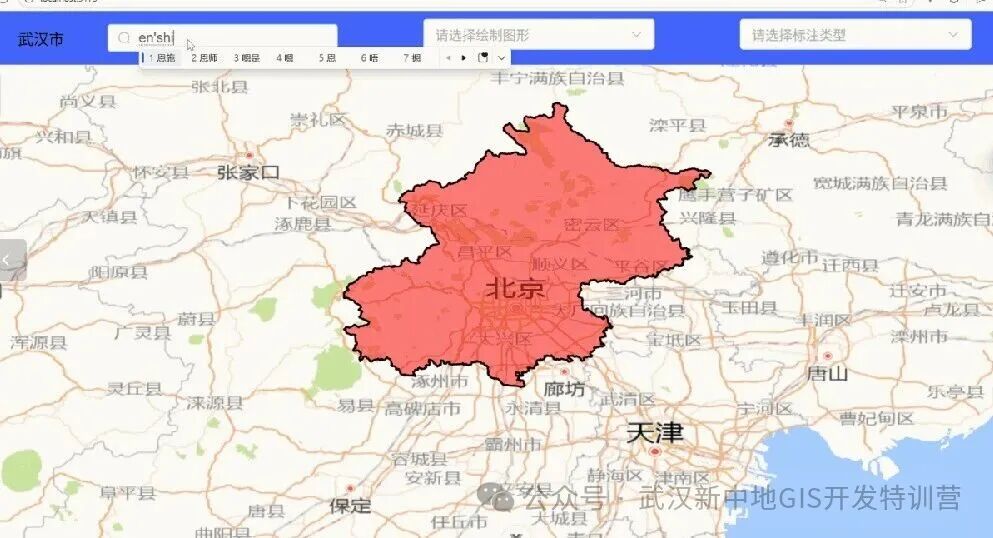
2504期的同学们本周已进入webgis二维开发阶段,首先是canvas和openlayers、mapbox开发,下面是同学们制作的一些课堂案例。

04 WebGIS三维开发-cesium
基于Cesium的开发应用,主要功能是加载并展示长沙城市的3D模型,同时支持交互操作:
基于cesium的交互式多边形绘制功能:

基于Cesium实现的智慧城市数据交互功能:
在新中地,同学们能从0基础的小白,逐步成长为胜任企业岗位的三维GIS开发工程师讲师。
这其中离不开老师们的悉心教导和贴心答疑。每个阶段,老师们都会细心回答同学的疑问,帮助大家排除学习中障碍。


想学习+下方↓↓小助手

















 1453
1453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









