







 该专栏为热销专栏榜 第68名
该专栏为热销专栏榜 第68名目录
为什么BEV可以做这么多的任务呢,它核心的技术到底是什么呢?
前言
车辆感知作为高等级辅助驾驶产品中的重要一环,是以多种传感器的数据与高精度地图的信息为输入,经过一系列的计算和处理,对周围环境精确感知的系统,作用相当于人眼。其感知识别任务本质上是对物理世界进行3D几何重构,使计算机能够“认识”到物理世界中的实体和元素。
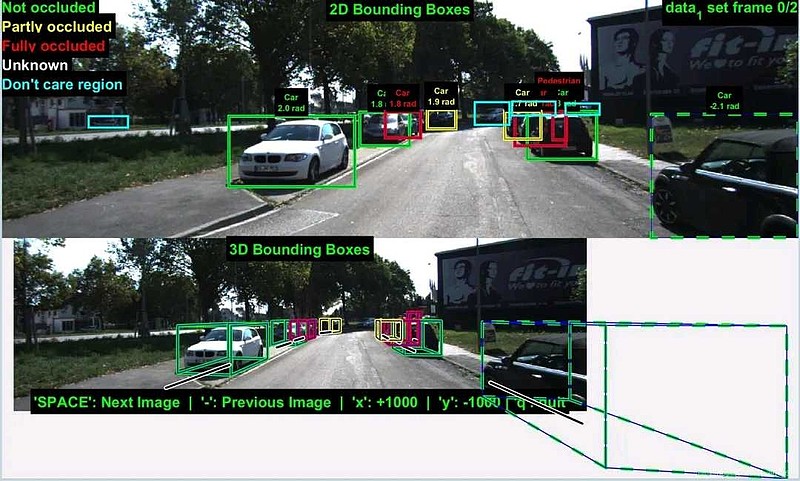
自动驾驶算法的传统感知方法是在前视图或透视图中执行检测、分割、跟踪等。之前所流行的2D感知的核心在于从单幅图像或连续图像序列中识别并区分目标物体。尽管这一传统视觉感知技术在过去的十年间得益于深度学习和大规模数据集,实现了显著的进步,这也是自动驾驶领域飞速进步的关键因素之一。但针对自动驾驶的具体需求,仅依赖2D感知并不足够。实际上,为了支持车辆在定位、轨迹预测和运动规划等下游任务,必须将2D感知所获得的信息转化到三维空间框架下。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











