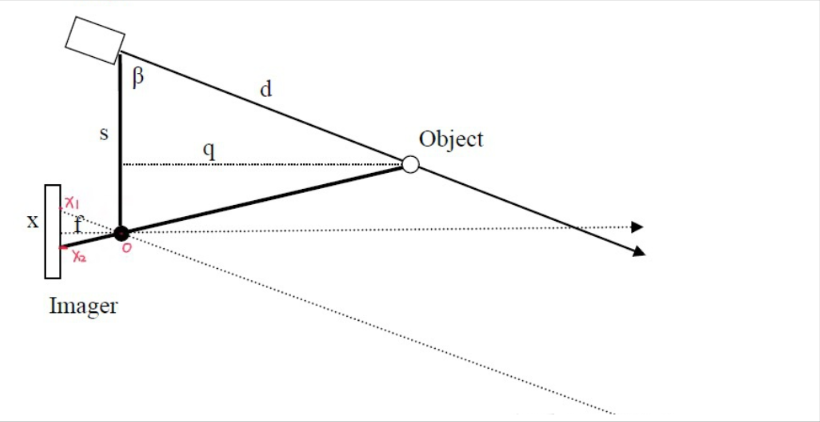
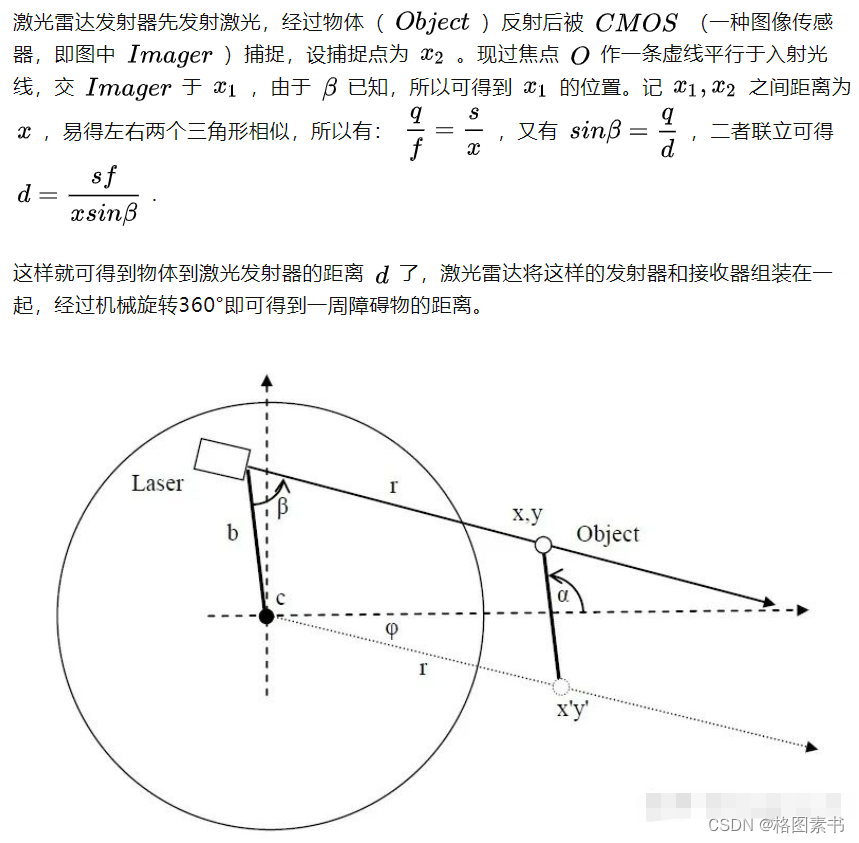
目录 知识储备 激光雷达原理和分类 测距原理 三角测距原理 TOF测距原理 雷达分类 机械激光雷达 MEMS激光雷达 相控阵激光雷达 FLASH激光雷达 激光雷达的数据 前言 国内外研究现状 相关关键技术 2.1 LiDAR 传感器工作原理 2.2 FPS 采样算法和 RANSAC 拟合算法 2.2.1 FPS 采样算法 2.2.2 RANSAC 拟合算法 2.3 Lenet-road 路面检测卷积神经网络 数据采集与处理 3.1 数据采集 3.1.1 点云数据实地采集 3.1.2 点云数据模拟生成 3.2 数据预处理 3.2.1 点云数据降采样 3.2.2 点云数据平面拟合 3.2.3 点云数据二次采样 3.3 生成灰度值矩阵 实验与结果 4.1 实验环境与实验数据集 4.2 实验设计 4.3 实验结果 知识储备 激光雷达原理和分类 测距原理 三角测距原理 三角测距原理如上图: TOF测距原理










 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文

























