




1、在windows系统用QT平台拆包uint8_t数组,没有出现字节对齐问题
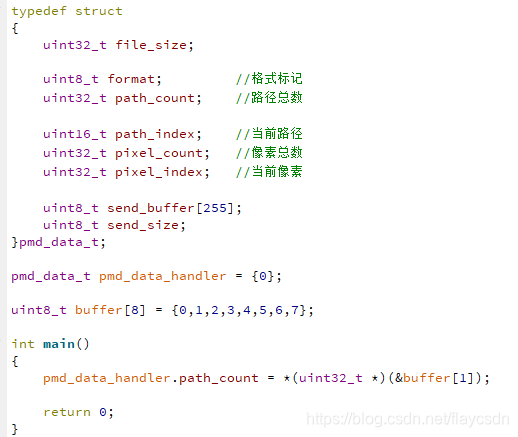
该方法把数据类型类比结构体,强制把uint8_t *指针转成uint32_t *,再用*得到32位数据,此过程需要考虑大小端模式,此处不做讨论。
2、在某M0+平台,也用类似方法分包数组
此时由于平台不一样,存在字节对齐的问题,字节不对齐访问,就会出现错误,如下:
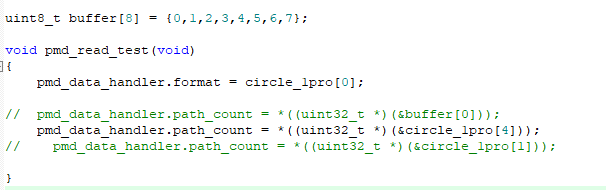
此处的buffer、circle_1pro都为uint8_t类型数组,数组在用强制转换时,均存在非法访问的错误,比如
 本文探讨了在不同平台下,如何处理字节对齐问题,特别是在将uint8_t数组转换为uint32_t指针时遇到的挑战。在Windows的QT环境中,这种转换通常不会引发问题,但在某些M0+平台上,不正确的字节对齐会导致访问错误。例如,非法访问可能发生在非字节对齐的数组元素上。为了解决这个问题,建议在字节对齐不确定的情况下,使用Memcpy函数或位移操作来确保安全的数据处理。
本文探讨了在不同平台下,如何处理字节对齐问题,特别是在将uint8_t数组转换为uint32_t指针时遇到的挑战。在Windows的QT环境中,这种转换通常不会引发问题,但在某些M0+平台上,不正确的字节对齐会导致访问错误。例如,非法访问可能发生在非字节对齐的数组元素上。为了解决这个问题,建议在字节对齐不确定的情况下,使用Memcpy函数或位移操作来确保安全的数据处理。
1、在windows系统用QT平台拆包uint8_t数组,没有出现字节对齐问题
该方法把数据类型类比结构体,强制把uint8_t *指针转成uint32_t *,再用*得到32位数据,此过程需要考虑大小端模式,此处不做讨论。
2、在某M0+平台,也用类似方法分包数组
此时由于平台不一样,存在字节对齐的问题,字节不对齐访问,就会出现错误,如下:
此处的buffer、circle_1pro都为uint8_t类型数组,数组在用强制转换时,均存在非法访问的错误,比如
 2259
4733
2259
4733

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























